") 小型 DC 電機磁場定向控制讓無人機進入更高遠的飛行航跡
小型 DC 電機磁場定向控制讓無人機進入更高遠的飛行航跡
無刷直流 (BLDC) 電機壽命長、采用直流電源且相對經(jīng)濟實惠,因此廣泛應用于硬盤驅(qū)動器、冷卻風扇和 DVD 播放機等電子設(shè)備的設(shè)計。通常情況下,BLDC 的速度和扭矩由 MCU 使用標量技術(shù)控制。
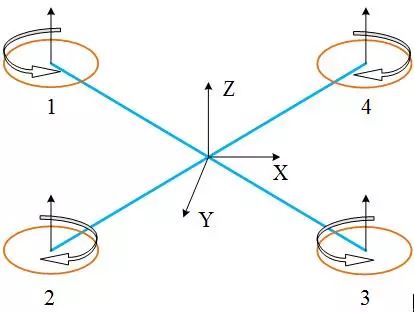
現(xiàn)在一類新型應用正悄然興起,其中以四旋翼無人機最具代表性,這類應用正日益受到業(yè)余愛好者的青睞此外,無人機也正被監(jiān)控等眾多商業(yè)應用納入考量。對這些應用而言,尤其重要的是控制器的動態(tài)響應,以及控制器在低速和無傳感器的情況下平穩(wěn)控制 BLDC 的能力。
對于負載動態(tài)變化的應用來說,標量技術(shù)不夠精確。而磁場定向控制 (FOC) 技術(shù)能夠大大提高精度,因而廣泛用于驅(qū)動高端工業(yè) AC 設(shè)備。通過實施 FOC,BLDC 能夠以合理的成本為無人機和其他高性能應用(例如醫(yī)療機器人、萬向系統(tǒng)和自主駕駛車輛)提供精確控制。
設(shè)計這類產(chǎn)品在過去并非易事。其中需要精通 FOC 或直接扭矩控制 (DTC) 等某些其他高級先進的電機控制技術(shù),以及專用軟件開發(fā)系統(tǒng)的操作知識。如果應用對成本敏感,例如可能在執(zhí)法行動中使用的帶監(jiān)控攝像頭的無人機,則設(shè)計經(jīng)濟實惠的 BLDC 電機也將面臨挑戰(zhàn)。
磁場定向控制 (FOC)
用于控制 BLDC 電機的傳統(tǒng)標量技術(shù)被稱為六步(梯形)控制。定子以六步過程驅(qū)動,會在產(chǎn)生的扭矩上振蕩。每一對繞組會通電,直到轉(zhuǎn)子到達下一位置,而此時電機將轉(zhuǎn)換到下一步。對于無傳感器的應用,在定子繞組中產(chǎn)生的反電動勢通常用于確定轉(zhuǎn)子的位置。
標量控制的動態(tài)響應無法處理動態(tài)負載快速變化的應用。因此,矢量控制正日益得到廣泛應用,從交流電機驅(qū)動的白色家電(如洗衣機)到以電池供電的產(chǎn)品。
FOC 是矢量控制最常用的方法之一。其工作原理為:管理定子繞組以確保轉(zhuǎn)子的永磁體所產(chǎn)生的磁通正交于定子的磁場。
FOC 最初是為控制三相交流電機而開發(fā)。考慮到用于小型無人機的 BLDC 電源是電壓為 21 V (五節(jié)鋰聚合物電池)的電池,電子元器件必須包含低壓三相逆變器系統(tǒng)。其他主要的元器件還有電機驅(qū)動器、MCU 以及執(zhí)行 FOC 算法的軟件,其中軟件可能是最重要的。
FOC 處理在直軸 - 交軸 (d-q) 域中完成,該域是一個旋轉(zhuǎn)參照系。直軸和交軸分量是磁鏈狀態(tài)矢量分解的兩個分量,即產(chǎn)生磁通 (d) 和扭矩 (q) 的分量。此關(guān)系如圖 1 所示。電機定子繞組內(nèi)的電流處于受控狀態(tài),以確保轉(zhuǎn)子的永磁體所產(chǎn)生的磁通正交(成 90°)于定子的磁場。除產(chǎn)生精確的電機控制之外,這種方式還能夠提供極其精確的扭矩控制,這才是在 d-q 坐標系中操作的真正優(yōu)勢。
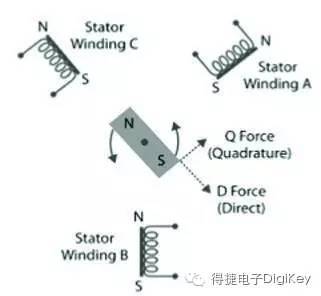
圖 1:直軸 - 交軸 (d-q) 力矩分量。
FOC 包含三個域變換:(1) 定子中的測量相電流從 3 相靜止坐標系變換到 2 相靜止坐標系 (α, β);(2) 該 2 相靜止坐標系變換為與轉(zhuǎn)子磁通對齊的旋轉(zhuǎn)二項坐標系 (d-q);(3) 為了實際驅(qū)動電機,d-q 分量又變回到定子坐標系,用于空間矢量脈沖寬度調(diào)制 (SVPWM)。此過程如圖 2 所示。
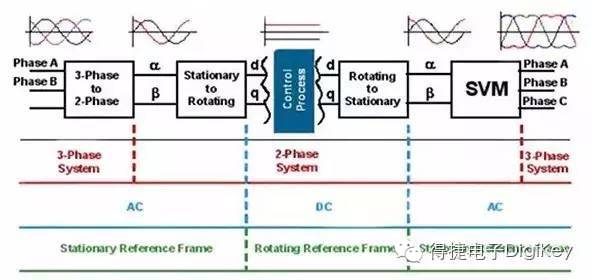
圖 2:FOC 控制所需的域變換
為了將 d-q 坐標系與轉(zhuǎn)子對齊,轉(zhuǎn)子位置的詳細信息是必不可少的。從相對簡單的反電動勢過零檢測,到復雜的滑模觀察器和擴展 Kalman 濾波器,轉(zhuǎn)子位置的估算技術(shù)各種各樣。
驅(qū)動電機
從靜止 3 相坐標系變換到 2 相 d-q 坐標系將產(chǎn)生之前所說的直軸和交軸分量。直軸 (d) 分量無有效扭矩,而事實上,它往往會增加電機的軸承磨損。因此,目標之一就是最大限度地減少此分量。交軸 (q) 分量可產(chǎn)生實際的電機扭矩,這由應用來決定。
d-q 分量應用于兩個 PI (比例-積分)控制器,分別對應零和應用扭矩設(shè)置,以產(chǎn)生矢量輸出。兩個 PI 控制器的輸出是是所需定子電壓空間矢量的(新)直軸和交軸電壓分量。如之前所述,最后一步是將 d-q 分量轉(zhuǎn)換回到定子坐標系中,以實際驅(qū)動電機。
上述過程只是 FOC 工作方式的總結(jié),而其實施所需的許多相當復雜的中間步驟,不在本文的范圍內(nèi)。有關(guān)與小型無人機直接相關(guān)的更詳細的 FOC 討論,您可參閱澳大利亞中央昆士蘭大學的帕特里克·費雪所寫的論文“HighPerformanceMotor Control”(高性能電機控制)。1
所需的中間步驟包括:
確定電機的特性(除極數(shù)以及電壓與電流的額定值,BLDC 電機很少會提供更多的銘牌信息)
轉(zhuǎn)子位置的估算(實施 FOC 控制的關(guān)鍵信息)
設(shè)計合適的電源控制方案
設(shè)計扭矩和速度控制器
從頭開始設(shè)計一個完整的功能性 FOC 電機控制系統(tǒng)是一項令人望而卻步的任務(wù),因此?Texas Instruments、Atmel?和NXPSemiconductors等半導體公司已經(jīng)打造了開發(fā)工具,以便為簡化實施 FOC 的設(shè)計消除大部分的復雜性。通常情況下,IC 供應商也會選擇將開發(fā)工具使用的軟件庫存儲在 ROM 中,并使其僅可在選定的 MCU 上使用,以此來保護其知識產(chǎn)權(quán)。
以 TexasInstruments 為例,該公司已將其InstaSPIN-FOC 解決方案用于 TIC2000Piccolo32位 MCU 系列的三個型號:F2806x、F2805x和F2802x。對成本極其敏感型的小型無人機應用來說,最合適的 MCU 是 F2802xMCU 系列,其中最受歡迎的產(chǎn)品為TMS320F28027FPTT。
如之前所述,精確的電機控制依賴于精確電機模型的建立InstaSPIN-FOC 包括一個名為“觀察器”的專有軟件算法,可估算轉(zhuǎn)子磁通量、角度、速度和扭矩 (FAST)。InstaSPIN-FOC 還具有電機參數(shù)識別能力,可在開發(fā)過程中離線提取必要的性能參數(shù)以及在工作過程中在線追蹤參數(shù)。
電機參數(shù)信息用于調(diào)整電流控制帶寬。與其他技術(shù)不同的是,TI 的 FAST 觀察算法有完全自微調(diào)的功能,無需為正常工作進行任何調(diào)整。 TI 稱該算法是市場上唯一可靠且“即時”的無傳感器 FOC 操作性解決方案。
因此,設(shè)計人員在啟動開發(fā)之后,在短短幾分鐘之內(nèi)便可擁有已完全微調(diào)的無傳感器觀察算法,以及完全微調(diào)的穩(wěn)定 FOC 扭矩控制系統(tǒng)。 在螺旋槳控制等應用中,設(shè)計人員還需要做的唯一任務(wù)就是測試與微調(diào) PI 速度控制單回路,以實現(xiàn)所需的性能和操作。
基本驅(qū)動系統(tǒng)的簡化版本如圖 3 所示。轉(zhuǎn)速 PI 控制器的輸出將作為 PI 電流控制器的輸入基準信號進行連接。如果轉(zhuǎn)速太低,電機將增大電流以產(chǎn)生更大的扭矩,從而加快轉(zhuǎn)速。反過來,如果電機運轉(zhuǎn)過快,電機將減少扭矩以減慢轉(zhuǎn)速。這兩個 PI 控制器共同形成了級聯(lián)式控制回路,這就表示控制系統(tǒng)是由具有一個或多個內(nèi)部回路的外部回路所組成。(圖中的 Kd、Kd、Ka 和 Kb 四個變量是電機控制軟件生成的系數(shù)。)
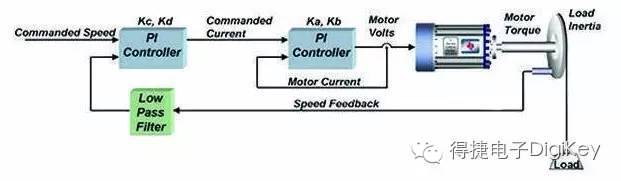
圖 3:速度控制器與電流控制器級聯(lián)(圖片由 Texas Instruments 提供)
關(guān)鍵元器件
除 MCU 之外,一些其他的關(guān)鍵元器件也值得一提。三相驅(qū)動器和逆變器系統(tǒng)是必不可少的。小扭矩無人機等低電流應用可使用 TI DRV83x2 系列集成式三相電機驅(qū)動器(例如DRV8332DKDR)。DRV83x2 系列包含先進的保護回路,該設(shè)計旨在促進系統(tǒng)的集成和易用性,以及保護設(shè)備免受短路、過流、超溫和欠壓等多種故障情況引起的永久性故障。
可能用于商業(yè)應用的高電流系統(tǒng)需要獨立的前置驅(qū)動器,例如DRV8301DCAR和具有三相逆變器配置的單獨 FET。TI 的CSD18533Q5ANexFET功率 MOSFET 就是其中的一個例子。
開發(fā)軟件對于基于 FOC 的電機控制應用的成功至關(guān)重要。TI 已在 BoosterPackBOOSTXL-DRV8301中開發(fā)了包含電機驅(qū)動開發(fā)軟件的套件。該套件通常是 6 到 24 V 電壓以及高達 10 A 連續(xù)電流工作條件的最佳選擇。這種情況需要控制板,例如采用 InstaSPIN-FOC 技術(shù)的 C2000 PiccoloTMS320F28027FLaunchPad—LAUNCHXL-F28027F。對連續(xù)電流低于 3.5 A 的電機來說,DRV8312-69M-KIT通常是更合適的選擇。
和其他供應商相比,TI 的產(chǎn)品系列更適合低壓低扭矩的應用,但其他的個別供應商也可提供電機控制開發(fā)套件。例如,NXPSemiconductors為 BLDC 提供了電機控制開發(fā)套件。OM13068 LPC1549LPCXpresso電機控制套件可與公司的LPC1549JBD48QLMCU配合使用。該平臺可用于控制BLDC、BLAC、步進和雙刷 DC 電機。
在性能方面,使用了上述元器件的設(shè)計可媲美市面上用于小型BLDC 電機的電機控制器。定制FOC 控制器和Plush 40 等商用控制器之間最顯著的區(qū)別在于速度極低時的換向能力。FOC 控制器能夠以大約100 RPM 的速度控制所有四個電機。此外,通過使用InstaSPIN 的速度環(huán)路,電機能夠在這些低轉(zhuǎn)速的情況下產(chǎn)生極大的扭矩。
定制FOC 板也可實現(xiàn)快于商用控制器的最高電機速度。平均來說,在電機速度從零增加至全速時,定制FOC 控制器所需的時間減少了35%。另外,每個電機在 FOC 控制下的空載轉(zhuǎn)速比任何受測試的商用控制器都要快。1
結(jié)論
一類新型的電機控制應用正在興起,此應用需要對小型 BLDC 電機具備出色的動態(tài)響應。這些應用包括醫(yī)療機器人、萬向系統(tǒng)、自主駕駛車輛和小型無人機。雖然 FOC 電機控制技術(shù)在過去幾十年中廣泛用于 AC 工業(yè)電機和白色家電電機,但由于此技術(shù)非常復雜,且需要高性能的 MCU,因此迄今為止尚未應用于由電池組供電的小型電機。然而過去幾年出現(xiàn)了讓這種可能成為現(xiàn)實的新產(chǎn)品。
如有任何問題,歡迎聯(lián)系得捷電子Digi-Key的客服團隊。
中國(人民幣)客服
-400-920-1199
-service.sh@digikey.com
-QQ在線實時咨詢
中國(美金)/香港客服
-400-882-4440
-852-3104-0500
-china.support@digikey.com
原文標題:小型 DC 電機磁場定向控制讓無人機進入更高遠的飛行航跡
文章出處:【微信公眾號:得捷電子DigiKey】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
DIY了一臺無人機,用全志T113芯片
開源項目!DIY了一臺無人機,用全志T113芯片
寶礫微DC-DC升級壓電動代步工具、無人機電源方案
無人機飛行仿真模擬訓練系統(tǒng)
無人機通過什么傳輸信號

如何利用無人機物聯(lián)卡實現(xiàn)無人駕駛飛行
第四集 知語云智能科技無人機反制技術(shù)與應用--無人機的組成與工作原理
第二集 知語云智能科技無人機反制技術(shù)與應用--無人機的發(fā)展歷程
第一集 知語科技無人機反制技術(shù)與應用--無人機的定義與分類
無人機全景監(jiān)測:空域管理的新革命
四旋翼無人機飛行原理【其利天下無人機方案開發(fā)】

【開源項目】使用 Blues Swan 3.0 制作的的 DIY 無人機
四旋翼無人機的飛行原理及控制方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論