 關于機器人與馬達控制分析和介紹
關于機器人與馬達控制分析和介紹
由機器人來裝配計算機,其實就是由不同的自動控制裝置透過取放(pick-and-place)的動作來處理印刷電路板的組裝、包裝、甚至是運送的每個環節。在電子世界中,半導體就像是電影明星,吸引所有媒體的目光,但在臺下組裝它們的,是許多的機器人。機器人不能因為熱能的產生而停下組裝印刷電路板的動作,它們必須持續地移動,這就是精密的馬達控制所發揮的作用。
依據不同的功能應用,會創造出迥異的馬達與控制電路的類型。為了提取重物而設計出的機器人,可能會采用不需要精密控制速度或定位的高扭力 AC 感應馬達。
另一方面,機器人手術則需要極為精密地控制速度與定位。通常會使用無刷直流 (BLDC) 伺服馬達,再加上閉路式定位回饋以提供精密的控制,或使用包含大量極數的步進馬達,才能達到手術等級需求的準確度。
BLDC 馬達
典型的 BLDC 馬達需要精密的電子控制電路以及持續判斷轉子位置的一些方法。轉子的位置可透過霍爾效應傳感器來判斷,或是在轉子旋轉時,測量每個電樞線圈 Back-EMF 中的變化。有刷直流馬達的速度由施加的電壓決定,而 BLDC 馬達的速度則是由切換的頻率決定。馬達是由圖 1 所示的 PWM 脈沖所驅動的。
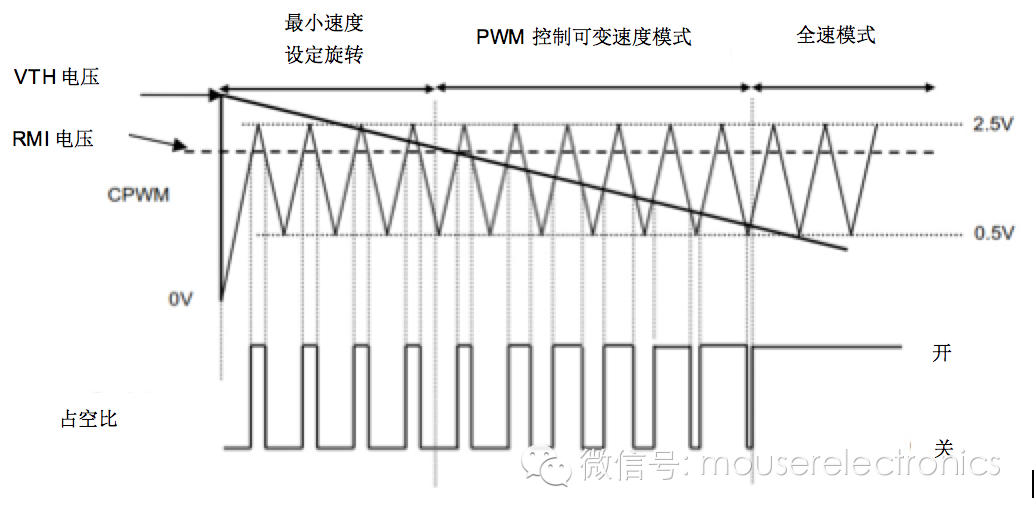
圖 1:PWM 驅動 BLDC 馬達
BLDC 馬達有三種基本類型:單相、雙相及三相,每一種類型的運作原理都相同,不是藉由機械式的電流變向器來改變轉子線圈的磁極性,而是利用晶體管持續改變定子線圈的相位來保持馬達轉動。在低功率的應用中經常可看到單相 BLDC 馬達。雙相馬達則比較常在中功率應用中看到。三相 BLDC 馬達通常用于驅動磁盤驅動器及 DVD 播放器。如下表所示,每種馬達類型皆有不同的特性及最適合的特定應用。
| BLDC馬達特性 | |||
| 單相 | 雙相 | 三相 | |
| 成本 | 良好 | 極佳 | 尚可 |
| 安靜 | 良好 | 尚可 | 極佳 |
| 效率 | 良好 | 尚可 | 極佳 |
步進馬達
并非所有應用都需要讓馬達自由地旋轉。步進馬達以有限的增量旋轉轉子,并希望轉軸停止不動,直到再次開始動作。步進馬達沒有刷或接點,是同步的直流馬達,具有以電子方式切換的磁場以旋轉電樞磁鐵,將數字脈沖轉換為機械的軸心旋轉動作,相當于機械版的 DAC,將數字步進轉換為模擬的角度位移。
步進機是同步的直流馬達,將完整的旋轉區分為離散數量的步進,步進或「相位」的數量與安排在中央齒輪形核心四周的電磁鐵數量相同。控制傳送至這些磁鐵的電流,即可將馬達轉動至精確的角度。
步進馬達通常是由每個線圈一個的 H-bridge 驅動,輸出則是由 PWM 控制 (圖 2)。旋轉角度與脈沖數量呈等比例,旋轉速度與脈沖的頻率呈等比例。
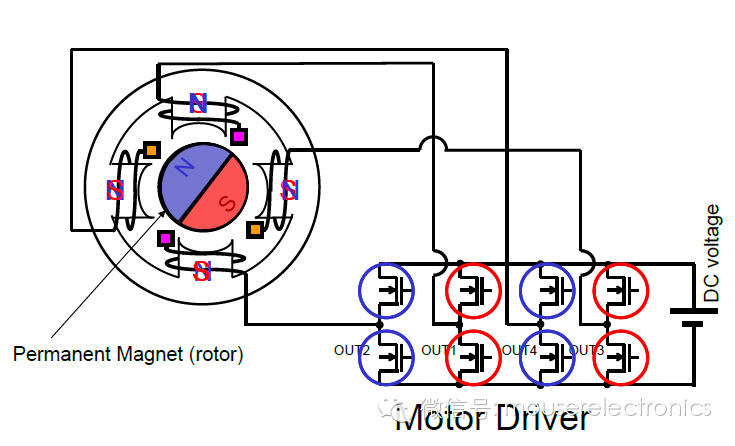
圖 2:含 H-bridge 驅動器的簡易步進馬達
為機器人提供電力
若您考慮進行機器人開發項目,Mouser 的圖書館提供適合于多種垂直市場應用與技術的教學課程、設計文章及白皮書。而進入設計時間時,請參考 Mouser 多樣化的交流、直流及伺服馬達產品;步進馬達;感測器;馬達驅動器PMIC;及完整的 機器人套件。產品知識中心是開啟設計項目最佳的起點。
-
傳感器
+關注
關注
2548文章
50678瀏覽量
752019 -
機器人
+關注
關注
210文章
28205瀏覽量
206535 -
馬達
+關注
關注
1文章
818瀏覽量
62209
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論