") 三菱FX3U定位控制和伺服應(yīng)用技術(shù)的詳細(xì)介紹和原點回歸指令說明
三菱FX3U定位控制和伺服應(yīng)用技術(shù)的詳細(xì)介紹和原點回歸指令說明
指令
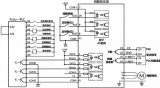
一、PLC定位及伺服控制系統(tǒng)介紹
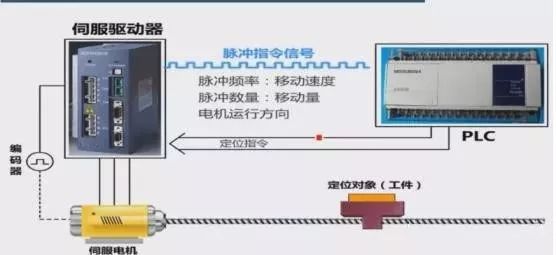
通過PLC給伺服驅(qū)動器發(fā)驅(qū)動脈沖,通過改變脈沖頻率來控制移動速度,通過改變脈沖數(shù)量來改變移動量,控制步進(jìn)電機(jī)移動方向。
伺服驅(qū)動器是執(zhí)行機(jī)構(gòu),在接收到PLC發(fā)來的信號,控制電機(jī)來運(yùn)動,通過位置編碼器精準(zhǔn)定位。
1、定位控制基本單元
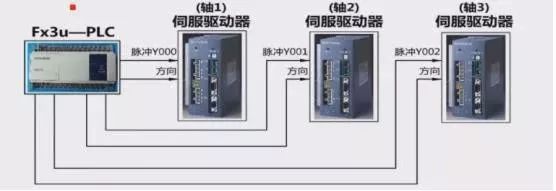
通過一個FX3U的CPU就可以帶三個軸的伺服驅(qū)動器。PLC的脈沖輸出端是固定的,Y0、Y1、Y2。具體是否具備脈沖輸出可看模塊的手冊。其余的Y可以作為方向的輸出端。輸出的最大脈沖頻率為100KHz。
2、FX3U PLC特殊適配器擴(kuò)展單元
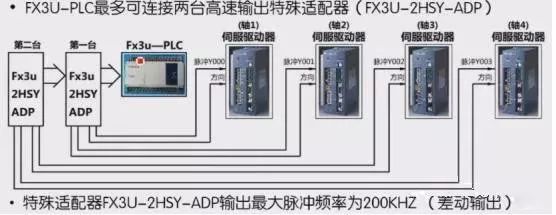
基本單元的脈沖輸出Y不起作用,只能用特殊適配器擴(kuò)展單元的輸入Y來輸出脈沖。
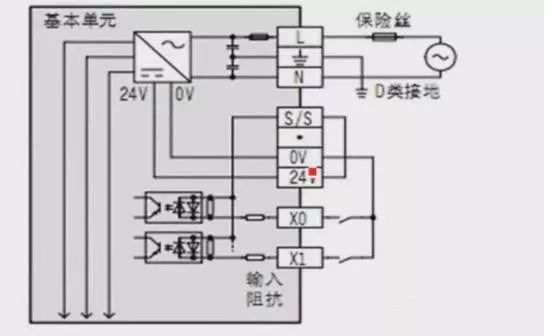
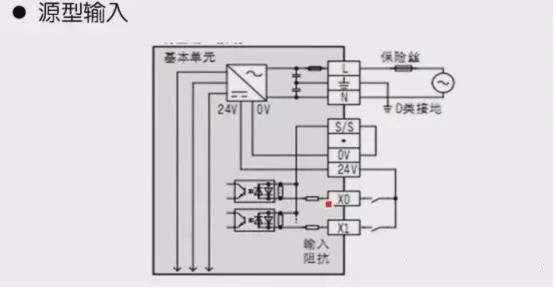
3、PLC輸入端內(nèi)部電路(漏型輸入)
4、PLC輸出端內(nèi)部電路
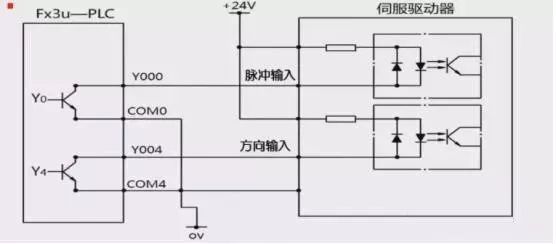
Y0可以提供脈沖頻率和脈沖數(shù)量。利用Y4輸出方向。由定位指令來實現(xiàn),不需要單獨編程Y4.
二、FX3U-PLC定位控制指令
(一)、原點回歸指令:ZRN

首先以S1的速度快速運(yùn)動,當(dāng)?shù)浇cS3后切換到爬行速度S2,D為輸出。只能在原點的正方向才能使用原點回歸指令,在反向是不能使用ZRN指令的。
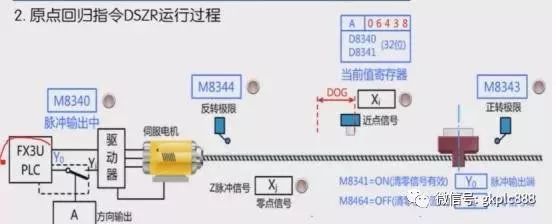
2、原點回歸指令ZRN運(yùn)行過程

3、原點回歸指令ZRN,速度變化過程及清零信號說明

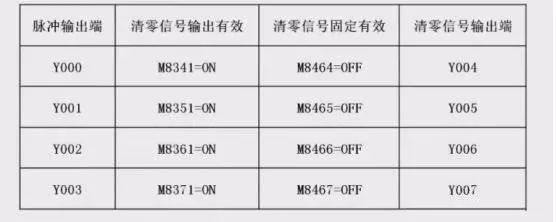
1)Y0脈沖輸出端的清零信號選擇(1)
M8341=ON;清零信號有效
M8464=OFF;清零信號輸出端固定有效
Y4--清零信號固定輸出端。
2)Y0脈沖輸出端的清零信號選擇(2)
M8341=ON;清零信號有效
M8464=ON;清零信號輸出指定有效
D8464--清零信號指定寄存器。
例:

上圖中當(dāng)執(zhí)行條件滿足,將M8341=1,M8464=1,將Y20送到D8464.
注意:若設(shè)置H0028,對應(yīng)的Y028,由于沒有Y028,則出現(xiàn)運(yùn)算錯誤。
3)清零信號輸出端固定(與脈沖輸出端一致性)
4)清零信號輸出端可指定(可任意選擇)

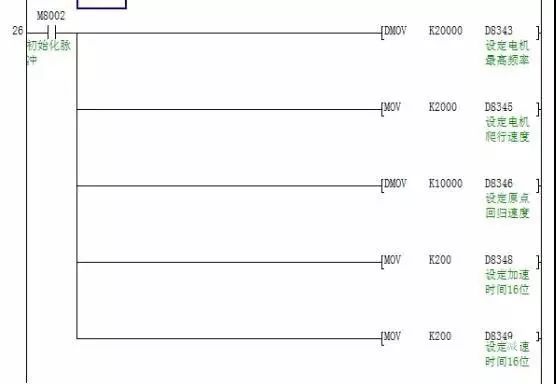
4、定位指令的最高速度設(shè)定
最高速度限定了PLC輸出最高脈沖頻率,為定位指令的上線頻率。

輸出是32位,所以要用兩個寄存器
5、定位指令基底速度(最小速度)的設(shè)定
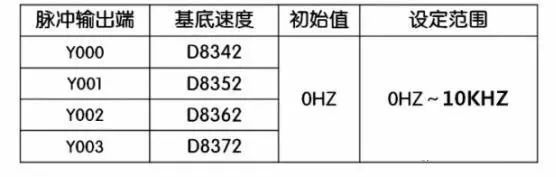
通常對于伺服電機(jī),設(shè)置基底速度=0Hz
對于步進(jìn)電機(jī),設(shè)置基底速度≠0Hz,否則步進(jìn)電機(jī)會失步。
6、定位指令加速時間的設(shè)定
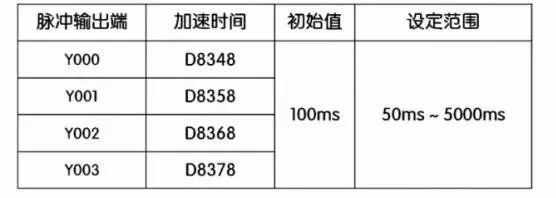
加速時間是指從基底速度加速到最高速度所需的時間,合理設(shè)置加速時間,避免電機(jī)沖擊。
7、定位指令的減速時間的設(shè)定

減速時間是指從最高速度減速到基底速度所需的時間
8、定位指令的標(biāo)志位說明(相對應(yīng)Y0脈沖輸出端標(biāo)志位)
定位指令的標(biāo)志位表明了定位指令在執(zhí)行過程中的狀態(tài)。
1)M8340 脈沖輸出監(jiān)控標(biāo)志位
要Y0端有脈沖輸出,M8340=on
當(dāng)Y0端停止輸出脈沖,M8340=off
2)M8348 定位指令驅(qū)動中
指令輸入觸發(fā),M8348=on,即使指令執(zhí)行結(jié)束,但指令輸入條件還接通,則M8348=on
只有指令輸入斷開,M8348=OFF
3)M8349 脈沖停止指令
Y0端脈沖輸出停止標(biāo)志位
當(dāng)M8349=on,Y0端輸出脈沖立即停止
要再次輸出脈沖:M8349=off,指令輸入條件再次從OFF變?yōu)镺N,再啟動一次。
用途:當(dāng)遇到緊急情況下,如急停按鈕,使用M8349=ON;立即終止脈沖輸出,電機(jī)立即停止。這個只是PLC側(cè)的急停,但最好急停按鈕要接到伺服驅(qū)動器側(cè)。
4)M8029 定位指令執(zhí)行正常結(jié)束標(biāo)志位
它是一個定位指令共用的標(biāo)志位。
當(dāng)定位指令執(zhí)行正常結(jié)束時,M8029就發(fā)出一個掃描周期長的脈沖。
5)M8329 指令執(zhí)行異常結(jié)束標(biāo)志位
是定位指令共用的標(biāo)志位
在工作臺運(yùn)動方向如碰到極限開關(guān),電機(jī)減速停機(jī),M8329發(fā)出一個掃描周期長的脈沖信號,并結(jié)束指令執(zhí)行
6)當(dāng)前值寄存器:D8341,D8340
當(dāng)前值寄存器D8341,D8340,它實時記錄并存儲工作臺距原點位置。當(dāng)定位執(zhí)行輸出正轉(zhuǎn)脈沖時,當(dāng)前寄存器中的值增加,當(dāng)定位指令輸出反轉(zhuǎn)脈沖時,當(dāng)前值寄存器中的值遞減。
一旦PLC斷電OFF,當(dāng)前值寄存器被清零,所以上電后,務(wù)必要將工作天的機(jī)械位置恢復(fù)到原點,即執(zhí)行回原點指令。
如果PLC使用電池,做寄存器電源后備時,只要一開始時,操作一次原點回歸指令即可。
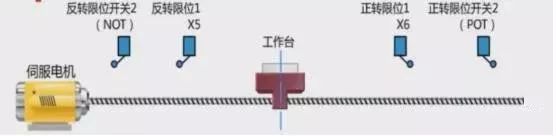
9、正傳極限開關(guān)和反轉(zhuǎn)極限開關(guān)
這里用了了兩套限位開關(guān),限位1接PLC,限位2接伺服驅(qū)動器,為了保護(hù)。

Y0 M8343 M8344當(dāng)極限標(biāo)志位為ON,電機(jī)減速停機(jī)。
Y1 M8353 M8354
Y2M8363 M8364
Y3 M8373 M8374
10、Y0脈沖輸出端的近點信號可以邏輯取反
M8345=off,是正邏輯,Xi=on 信號有效
M8345=ON是負(fù)邏輯,Xi=OFF 信號有效
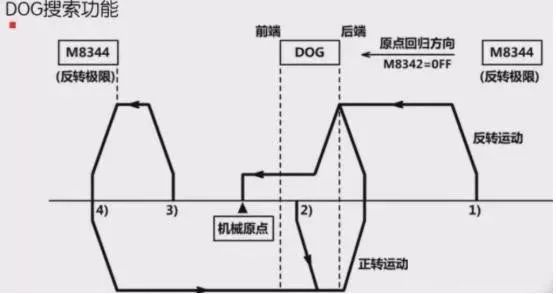
(二)帶DOG搜索的原點回歸指令 DSZR
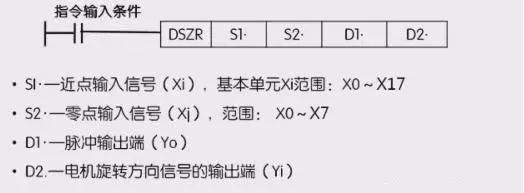
零點輸入信號取值Z相脈沖,電機(jī)旋轉(zhuǎn)一圈,輸出一個脈沖。
要將機(jī)械原點與電氣原點要重合上,
當(dāng)收到Xi近點信號,觸發(fā)降速到爬行速度,進(jìn)入DOG區(qū),再接觸到零點信號Xj后停止運(yùn)行。

簡單看個原點回歸程序,一起理解下:


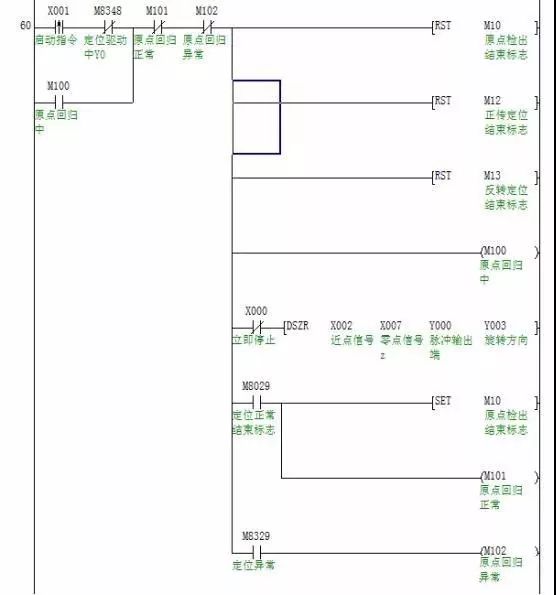
今天簡單看看原點回歸程序怎么編,包括一些指令及寄存器的意思,這些都是固定的,大家知道這么用就行
-
驅(qū)動器
+關(guān)注
關(guān)注
52文章
8156瀏覽量
146005 -
plc
+關(guān)注
關(guān)注
5008文章
13150瀏覽量
462060 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
150文章
3095瀏覽量
147346 -
伺服控制
+關(guān)注
關(guān)注
5文章
149瀏覽量
20482
原文標(biāo)題:三菱FX3U定位控制及伺服應(yīng)用技術(shù)之原點回歸指令
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
三菱FX3U PLC利用RS指令實現(xiàn)Modbus RTU通信
三菱FX系列是如何控制步進(jìn)電機(jī)回原點的?
三菱PLC編程手冊(FX3U·FX3UC基本·應(yīng)用指令說明書
Labview如何通過NI OPC與三菱FX3U PLC進(jìn)行通訊
三菱FX3U接入MQTT平臺的三步
三菱PLC FX3U與FX5U連接MQTT物聯(lián)網(wǎng)關(guān)
通過PLC網(wǎng)關(guān)如何實現(xiàn)三菱FX3U的遠(yuǎn)程上下載程序?
三菱FX—3U的PLC與松下A5的伺服驅(qū)動器
關(guān)于三菱FX5UPLC的原點回歸問題
三菱plcfx3u與伺服驅(qū)動器接線教程





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論