") 自動(dòng)駕駛及關(guān)鍵技術(shù)V2X研究
自動(dòng)駕駛及關(guān)鍵技術(shù)V2X研究
預(yù)期智能網(wǎng)聯(lián)車在未來十年還將迎來爆發(fā)增長,2025年可實(shí)現(xiàn)完全自動(dòng)駕駛汽車的商業(yè)化,5G將為車聯(lián)網(wǎng)行業(yè)帶來躍進(jìn)式的產(chǎn)品和商業(yè)模式創(chuàng)新,具備巨大的市場潛力。本文對(duì)自動(dòng)駕駛及關(guān)鍵技術(shù)的分類、主要應(yīng)用場景和運(yùn)營商V2X業(yè)務(wù)發(fā)展建議進(jìn)行分析。
關(guān)鍵詞:自動(dòng)駕駛 V2X C-V2X
1、引言
車聯(lián)網(wǎng)指借助新一代信息和通信技術(shù),實(shí)現(xiàn)車內(nèi)、車與車、車與路、車與人、車與服務(wù)平臺(tái)的全方位網(wǎng)絡(luò)連接,提升汽車智能化水平和自動(dòng)駕駛能力,構(gòu)建汽車和交通服務(wù)新業(yè)態(tài),從而提高交通效率,改善汽車駕乘感受,為用戶提供智能、舒適、安全、節(jié)能、高效的綜合服務(wù)。
智能網(wǎng)聯(lián)汽車被認(rèn)為是產(chǎn)業(yè)發(fā)展的方向和戰(zhàn)略制高點(diǎn),近年工信部陸續(xù)印發(fā)《汽車行業(yè)中長期發(fā)展規(guī)劃》、《智能網(wǎng)聯(lián)汽車技術(shù)路線圖》、智能網(wǎng)聯(lián)汽車標(biāo)準(zhǔn)體系與產(chǎn)業(yè)體系建設(shè)指南征求意見等;發(fā)改委印發(fā)《智能汽車創(chuàng)新發(fā)展戰(zhàn)略》征求意見稿,從頂層設(shè)計(jì)、標(biāo)準(zhǔn)法規(guī)制定、試點(diǎn)示范區(qū)建設(shè)等方面積極推動(dòng)智能網(wǎng)聯(lián)汽車發(fā)展,而其關(guān)鍵技術(shù)V2X通信技術(shù)是其重要基石。
車聯(lián)網(wǎng)產(chǎn)業(yè)生態(tài)的繁榮與基礎(chǔ)網(wǎng)絡(luò)接入密切相關(guān),預(yù)期未來十年還將迎來爆發(fā)增長。2025年,遠(yuǎn)程和短程通訊終端的整車裝備率增至80%,DA、PA車輛占有率保持穩(wěn)定,高度自主駕駛(HA)車輛市場占有率約10%-20%。,5G將為車聯(lián)網(wǎng)行業(yè)帶來躍進(jìn)式的產(chǎn)品和商業(yè)模式創(chuàng)新,具備巨大的市場潛力。
2、自動(dòng)駕駛概述
2.1 自動(dòng)駕駛等級(jí)
自動(dòng)駕駛并不是僅僅指無人駕駛,自動(dòng)駕駛技術(shù)的發(fā)展分為不同層級(jí),以美國汽車工程師學(xué)會(huì)(SAE)的標(biāo)準(zhǔn)劃分為例,可以把自動(dòng)駕駛分為六個(gè)等級(jí)。
第0級(jí):無自動(dòng)化,由人類駕駛員全權(quán)操控汽車,可以得到警告或干預(yù)系統(tǒng)的輔助。這個(gè)等級(jí)為無自動(dòng)駕駛輔助功能,完全是駕駛員控制。
第1級(jí):駕駛支援,通過駕駛環(huán)境對(duì)方向盤和加減速中的一項(xiàng)操作提供駕駛支持,其他的駕駛動(dòng)作由人類駕駛員進(jìn)行操作。
第2級(jí):部分自動(dòng)化,通過駕駛環(huán)境對(duì)方向盤和加減速中的多項(xiàng)操作提供駕駛支持,其他的駕駛動(dòng)作都由人類駕駛員進(jìn)行操作。這個(gè)等級(jí)自動(dòng)系統(tǒng)能夠完成某些駕駛?cè)蝿?wù),但駕駛員需要監(jiān)控駕駛環(huán)境,隨時(shí)接管。
第3級(jí):有條件自動(dòng)化,由無人駕駛系統(tǒng)完成所有的駕駛操作,根據(jù)系統(tǒng)要求,人類駕駛者提供適應(yīng)的應(yīng)答。由系統(tǒng)和駕駛員分享控制權(quán),駕駛員可以在特定場景放棄主要控制權(quán),在系統(tǒng)控制時(shí),駕駛員需要觀察周圍情況,在系統(tǒng)退出的時(shí)候隨時(shí)接上。
第4級(jí):高度自動(dòng)化,由自動(dòng)駕駛系統(tǒng)完成所有的駕駛操作。根據(jù)系統(tǒng)要求,人類駕駛者不一定需要對(duì)所有的系統(tǒng)請(qǐng)求作出應(yīng)答,限定道路和環(huán)境條件等。在大部分時(shí)間中系統(tǒng)可以替代駕駛員操縱,駕駛員無需觀察周圍環(huán)境,屬于有限自動(dòng)駕駛輔助(高度自動(dòng)駕駛)。
第5級(jí):完全自動(dòng)化:在所有人類駕駛者可以應(yīng)付的道路和環(huán)境條件下,均可以由自動(dòng)駕駛系統(tǒng)自主完成所有的駕駛操作。為真正的無人駕駛,汽車完全實(shí)現(xiàn)無人駕駛。
2.2 自動(dòng)駕駛關(guān)鍵技術(shù)
自動(dòng)駕駛的基本過程分為三部分:感知->認(rèn)知->執(zhí)行。首先通過傳感系統(tǒng),代替人的視覺和聽覺感知,去搜集汽車周邊信息,常用的傳感器包括了攝像機(jī)、激活雷達(dá)、毫米波雷達(dá)等等,目前兩種主流技術(shù)路線,一種是以特斯拉為代表的以攝像機(jī)為主導(dǎo)的多傳感器融合方案;另一種是以谷歌、百度為代表的以激光雷達(dá)為主導(dǎo),其他傳感器為輔助的技術(shù)方案。然后具有人工智能特性的控制系統(tǒng),根據(jù)駕駛員意圖、當(dāng)前車速度等狀態(tài)及外部情況,規(guī)劃駕駛指令、規(guī)劃行駛路徑,最后由執(zhí)行系統(tǒng)來執(zhí)行駕駛指令、控制車輛狀態(tài)。
自動(dòng)駕駛涉及的關(guān)鍵技術(shù)包括了V2X、高精度地圖、決策與規(guī)劃技術(shù)等關(guān)鍵技術(shù)。
V2X
自動(dòng)駕駛的傳感系統(tǒng)需要通過搜集汽車周邊信息,然后做出決策(轉(zhuǎn)向、變道、加速、減速)。與現(xiàn)有的攝像頭視頻識(shí)別、毫米波雷達(dá)、激光雷達(dá)類似,V2X是一種獲得其他車輛、行人行駛狀態(tài)的手段,V2X的優(yōu)勢在于獲得視距外汽車狀態(tài)的一種有效手段,和雷達(dá)、攝像頭視頻識(shí)別、傳感器共同組成了車輛對(duì)外界環(huán)境的信息獲取系統(tǒng)。而這些信息是自動(dòng)駕駛汽車做出決策的重要依據(jù)。
高精地圖
高精地圖擁有精準(zhǔn)的車輛位置信息和豐富的道路元素?cái)?shù)據(jù)信息,可以幫助汽車預(yù)知路面復(fù)雜信息,如坡度、曲率、航向等。和傳統(tǒng)相比具有更高的實(shí)時(shí)性。由于道路路面經(jīng)常發(fā)生變化,如道路整修、標(biāo)識(shí)線磨損或重漆、交通標(biāo)識(shí)改變等,這些改變都要及時(shí)反映在高精地圖上。高精地圖將更強(qiáng)調(diào)空間的三維模型以及精度,將精度從米級(jí)降到厘米級(jí),必須非常精確的顯示路面上的每一個(gè)特征和狀況。
規(guī)劃決策
決策是無人駕駛體現(xiàn)智能性的核心的技術(shù),相當(dāng)于自動(dòng)駕駛汽車的大腦,它通過綜合分析環(huán)境感知系統(tǒng)提供的信息,及從高精度地圖路由尋址的結(jié)果,對(duì)當(dāng)前車輛進(jìn)行規(guī)劃(速度規(guī)劃、朝向規(guī)劃、加速度規(guī)劃等),并產(chǎn)生相應(yīng)的決策(跟車、換道、停車等)。規(guī)劃技術(shù)還需要考慮車輛的機(jī)械特性、動(dòng)力學(xué)特性、運(yùn)動(dòng)學(xué)特性。常用的決策技術(shù)有專家控制、隱馬爾科夫模型、貝葉斯網(wǎng)絡(luò)、模糊邏輯等。
3、車用無線通信技術(shù)(V2X)
3.1 V2X定義
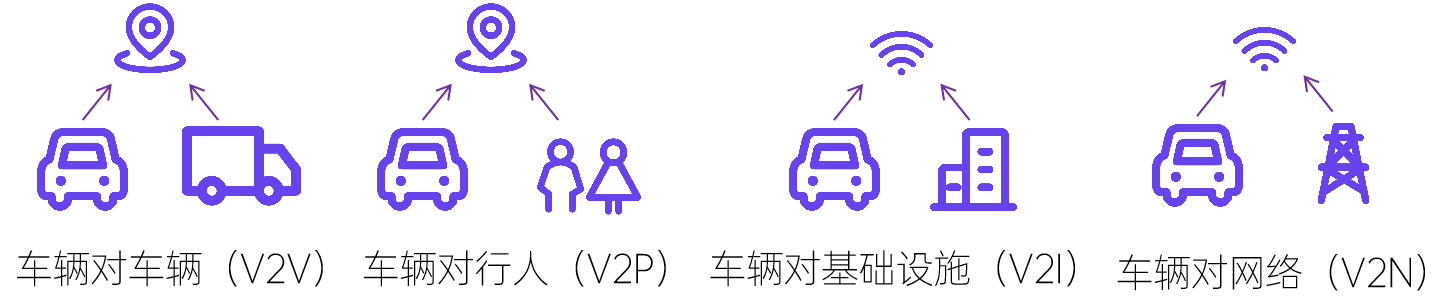
車用無線通信技術(shù)(Vehicle to Everything ,V2X)是將車輛與一切事物相連接的新一代信息通信技術(shù),其中V代表車輛,X代表任何與車交互信息的對(duì)象,當(dāng)前X主要包含車、人、交通路側(cè)基礎(chǔ)設(shè)施和網(wǎng)絡(luò)。V2X交互的信息模式包括:車與車之間(Vehicle to Vehicle,V2V)、車與路之間(Vehicle to Infrastructure ,V2I)、車與人之間(Vehicle to Pedestrian,V2P)、車與網(wǎng)絡(luò)之間(Vehicle to Network,V2N)的交互。
V2V技術(shù)允許車輛通過轉(zhuǎn)發(fā)自身及前方的實(shí)時(shí)信息來預(yù)防事故的發(fā)生,從而減少駕駛時(shí)間,最終實(shí)現(xiàn)改善交通環(huán)境,減少交通擁堵的目的。
V2I技術(shù)通過無線的方式幫助車輛和路側(cè)的交通設(shè)施實(shí)現(xiàn)數(shù)據(jù)交換,主要應(yīng)用包括交叉路口安全管理、車輛限速控制、電子收費(fèi)、運(yùn)輸安全管理,以及道路施工和限高警示等。這項(xiàng)技術(shù)會(huì)推動(dòng)交通設(shè)施智能化,包括禁止駛?cè)霟魳?biāo)、天氣信息系統(tǒng)等交通設(shè)施都可進(jìn)化為通過多種算法可識(shí)別高風(fēng)險(xiǎn)情況并自動(dòng)采取警示措施的智能交通設(shè)施。
V2P技術(shù)則使得行人和騎車人通過智能手機(jī)成為V2X通信環(huán)境中的一個(gè)節(jié)點(diǎn)。它可以發(fā)送或接收警示信號(hào),例如可以預(yù)先告知聯(lián)網(wǎng)信號(hào)燈自身是否需要延長過馬路的時(shí)間,也可以提示附近車輛前方路口有行人要過馬路,或者提示車輛相鄰車道有自行車在騎行。
3.2 V2X兩大產(chǎn)業(yè)化陣營
V2X產(chǎn)業(yè)分為DSRC和C-V2X兩個(gè)標(biāo)準(zhǔn)和產(chǎn)業(yè)陣營。在中國市場,因?yàn)楸旧碛肿鴵砣蜃畲蟮?a href="http://www.nxhydt.com/v/tag/9979/" target="_blank">4G LTE網(wǎng)絡(luò)和成熟的產(chǎn)業(yè)鏈,并且對(duì)DSRC技術(shù)上沒有太多積累,考慮到規(guī)避專利風(fēng)險(xiǎn)等因素,因此有分析認(rèn)為會(huì)向C-V2X傾斜。
DSRC(專用短程無線通信標(biāo)準(zhǔn)),以IEEE802.11p為基礎(chǔ),V2V為其主要的應(yīng)用方式。DSRC最大的競爭籌碼是啟動(dòng)早,早在1999年,美國聯(lián)邦通信委員會(huì)就在5.9 GHz區(qū)域?yàn)閂2X留出了75 MHz的帶寬,美國、歐洲等國家已提出相關(guān)標(biāo)準(zhǔn)規(guī)格,經(jīng)過十多年的發(fā)展歷史,形成成熟的產(chǎn)業(yè)鏈,并可以進(jìn)入商用。
C-V2X,C是蜂窩(Cellular),是基于4G/5G等蜂窩網(wǎng)通信技術(shù)演進(jìn)形成的車用無線通信技術(shù),包含LTE-V2X和5G-V2X,從技術(shù)演進(jìn)角度講,LTE-V2X支持向5G-V2X平滑演進(jìn)。C-V2X 是移動(dòng)通信標(biāo)準(zhǔn)化組織3GPP的推進(jìn)下開始啟動(dòng),目前正處于標(biāo)準(zhǔn)制定的關(guān)鍵階段,并在2017年制定了第一版的標(biāo)準(zhǔn),形成以華為、高通等通信產(chǎn)業(yè)鏈企業(yè)、電信運(yùn)營商和汽車企業(yè)為主的產(chǎn)業(yè)陣營。
3.3 V2X典型應(yīng)用場景
V2X目前主要覆蓋3大典型應(yīng)用場景:交通主動(dòng)安全、交通效率和信息服務(wù),并且向支持實(shí)現(xiàn)自動(dòng)駕駛應(yīng)用演進(jìn)。在未來移動(dòng)通信論壇和車載信息服務(wù)產(chǎn)業(yè)應(yīng)用聯(lián)盟,共同發(fā)布的《智能網(wǎng)聯(lián)汽車基本應(yīng)用白皮書》中定義了72種智能網(wǎng)聯(lián)汽車應(yīng)用場景,其中基本應(yīng)用場景包括了以下:
交通主動(dòng)安全:前向碰撞預(yù)警、左轉(zhuǎn)輔助/告警、匯入主路輔助/碰撞告警、交叉路口碰撞告警(有信號(hào)燈/無信號(hào)燈/非視距等,存在路邊單元)、交叉路口碰撞告警(有信號(hào)燈/無信號(hào)燈/非視距等,不存在路邊單元)、超車輔助/逆向超車提醒/借道超車、盲區(qū)告警/換道輔助、緊急制動(dòng)預(yù)警(緊急電子剎車燈)、車輛安全功能失控告警、異常車輛告警(包含前方靜止/慢速車輛)、靜止車輛提醒(交通意外,車輛故障等造成)、非機(jī)動(dòng)車(電動(dòng)車,自行車等)橫穿預(yù)警/行人橫穿預(yù)警、緊急車輛提示、道路濕滑/危險(xiǎn)路段提醒(大風(fēng)、大霧、結(jié)冰等)、創(chuàng)紅燈(/黃燈)告警)
交通效率:減速區(qū)/限速提醒(隧道限速、普通限速、彎道限速等)、車速引導(dǎo)、車內(nèi)標(biāo)牌、電子不停車收費(fèi)
信息服務(wù):進(jìn)場支付、自動(dòng)停車引導(dǎo)及控制、SOS/eCALL業(yè)務(wù)、車輛被盜/損壞(包括整車和部件)警報(bào)、車輛遠(yuǎn)程診斷,維修保養(yǎng)提示
4、基于蜂窩網(wǎng)通信技術(shù)的車用無線通信技術(shù)(C-V2X)
4.1 C-V2X通信接口
C-V2X中包含了兩種通信接口:一種是車、人、路之間的短距離直接通信接口(PC5),另一種是終端和基站之間的通信接口(Uu),可實(shí)現(xiàn)長距離和更大范圍的可靠通信。C-V2X 直接通信可提供擴(kuò)展的通信范圍和增強(qiáng)的可靠性,而不依賴蜂窩網(wǎng)絡(luò)的協(xié)助或覆蓋。
網(wǎng)絡(luò)通信(Uu接口),利用LTE廣播,通過V2X服務(wù)器中轉(zhuǎn),把信息傳送到另一個(gè)節(jié)點(diǎn)。通過LTE方式無線基站對(duì)V2V數(shù)據(jù)的調(diào)度和接口的管理進(jìn)行輔助。Uu接口具有廣覆蓋,可回傳到云平臺(tái)特點(diǎn),適合信息娛樂類、遠(yuǎn)距離的道路危險(xiǎn)或交通狀況、延遲容忍安全消息等業(yè)務(wù)類型。
直連通信(PC5接口),以LTE標(biāo)準(zhǔn)中的D2D(Device-To-Device,設(shè)備間)鄰近通信服務(wù)為基礎(chǔ)。PC5接口,可以實(shí)現(xiàn)250Kph的高速度和高密度通信,支持無LTE網(wǎng)絡(luò)覆蓋下通信LTE-V2X同時(shí)支持基站和全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)的時(shí)間同步。允許用戶在有或沒有網(wǎng)絡(luò)覆蓋的條件下彼此間直接廣播消息。PC5接口具有低延時(shí)、覆蓋范圍小特點(diǎn),適合交通安全類、局域交通效率類業(yè)務(wù)。
4.2 C-V2X標(biāo)準(zhǔn)化進(jìn)展
C-V2X的標(biāo)準(zhǔn)化可以分成3個(gè)階段:
支持LTE-V2X的3GPP R14版本標(biāo)準(zhǔn)已于2017年正式發(fā)布,在TR22.885中定義了V2V(車到車)、V2I(車到路邊設(shè)施)、V2P(車到人)、V2N(車到網(wǎng)絡(luò))、V2X(車到其它)等27類場景,面向輔助駕駛和交通安全。
支持LTE-V2X增強(qiáng)(LTE-eV2X)的3GPP R15版本標(biāo)準(zhǔn)于2018年6月正式完成。標(biāo)準(zhǔn)TS22.886中已經(jīng)定義了25個(gè)用例共計(jì)5大類增強(qiáng)的V2X業(yè)務(wù)需求,包括基本需求、車輛編隊(duì)行駛,半/全自動(dòng)駕駛、傳感器信息交互和遠(yuǎn)程駕駛。
支持5G-V2X的3GPP R16+版本標(biāo)準(zhǔn)于2018年6月啟動(dòng)研究,將與LTE-V2X/LTE-eV2X形成互補(bǔ)關(guān)系。5G eV2X當(dāng)前僅完成需求規(guī)范,定義了25個(gè)用例,包括自動(dòng)排隊(duì)駕駛、半/全自動(dòng)駕駛、支持?jǐn)U展傳感、遠(yuǎn)程駕駛和通用需求。目前,3GPP 5G NR支持V2X的標(biāo)準(zhǔn)化工作,有望在2018年年底,列為R 16版本的標(biāo)準(zhǔn)化項(xiàng)目進(jìn)行研究與標(biāo)準(zhǔn)化;預(yù)期NR-V2X產(chǎn)品最早有可能于2022年在上市車型中面世。
我國也在推進(jìn)C-V2X標(biāo)準(zhǔn)化工作,例如工信部聯(lián)合國標(biāo)委發(fā)布“國家車聯(lián)網(wǎng)產(chǎn)業(yè)標(biāo)準(zhǔn)體系建設(shè)指南”, 其中信息通信分冊(cè)為V2X通信標(biāo)準(zhǔn)建設(shè)給出了體系參考;CCSA為主承擔(dān)V2X通信行業(yè)標(biāo)準(zhǔn)制定,目前完成總體及空口要求,計(jì)劃2018年完成安全及網(wǎng)絡(luò)設(shè)備標(biāo)準(zhǔn);此外多個(gè)行業(yè)協(xié)會(huì)或聯(lián)盟在應(yīng)用及其他關(guān)鍵技術(shù)上開始發(fā)力。
5、國內(nèi)外電信運(yùn)營商V2X業(yè)務(wù)發(fā)展情況及建議
5.1 國內(nèi)外運(yùn)營商積極推進(jìn)V2X業(yè)務(wù)
摩根士丹利于近期發(fā)布了一份無人駕駛研報(bào)預(yù)計(jì),無人駕駛汽車將給全球通信產(chǎn)業(yè)帶來1.3萬億美元的市場增量。“以5G通訊網(wǎng)絡(luò)為基礎(chǔ)的無人駕駛將帶來產(chǎn)業(yè)革命,而這場革命帶來的市場機(jī)會(huì)沒有受到足夠的重視”,該研報(bào)小組負(fù)責(zé)人Emmet Kelly稱,“無人駕駛汽車對(duì)通訊行業(yè)的改變要比智能手機(jī)的出現(xiàn)對(duì)其改變還要大。”一級(jí)無人駕駛汽車需要每小時(shí)3G的數(shù)據(jù)空間,而五級(jí)無人駕駛汽車每小時(shí)將消耗50G數(shù)據(jù)。
國內(nèi)外各大運(yùn)營商都積極推進(jìn)C-V2X業(yè)務(wù):
AT&T在消費(fèi)者電子展上宣布,它將于德爾福和福特合作,共同提升汽車與其他車輛及基建設(shè)施的溝通效率。AT&T也正在與美國駕駛測試中心合作,在密歇根建立了無人駕駛汽車測試中心。
NTT Docomo在今年世界移動(dòng)通信大會(huì)上,與SONY聯(lián)合展示新概念車,發(fā)力無人駕駛市場。所構(gòu)建的基于5G連接的自動(dòng)駕駛車輛,裝備了4K攝像頭、傳感器和數(shù)字標(biāo)識(shí)系統(tǒng),可以帶來一個(gè)全新的乘車體驗(yàn)。車上的4K數(shù)字標(biāo)識(shí)和顯示系統(tǒng)可以用來展示廣告和信息;通過車輛上安裝的圖像傳感器手機(jī)的視頻進(jìn)行分析,可實(shí)現(xiàn)基于位置的信息交互;通過超高清攝像機(jī)解決方案,4K駕駛顯示屏可以實(shí)現(xiàn)360度測量,超過人類視覺;通過云可以實(shí)現(xiàn)遠(yuǎn)程駕駛和控制。NTT Docomo同時(shí)構(gòu)建了基于邊緣計(jì)算的車聯(lián)網(wǎng)平臺(tái),為今后車聯(lián)網(wǎng)大數(shù)據(jù)分析做好基礎(chǔ)設(shè)施準(zhǔn)備。
國內(nèi)的三大運(yùn)營商也紛紛聯(lián)合車廠、通信設(shè)備商在5G試驗(yàn)環(huán)境完成無人駕駛車測試,例如在今年4月,中國電信攜手中興通信和百度在雄安新區(qū)完成了基于5G環(huán)境的無人駕駛試驗(yàn)。
5.2 運(yùn)營商V2X業(yè)務(wù)發(fā)展建議
但無人駕駛的商業(yè)化投資成本巨大,我國的高速公路有20萬公里左右,按照站間距200米算,大概需要100萬的設(shè)施數(shù)量,高速路旁邊立的10多米桿的費(fèi)用是每個(gè)10萬及以上甚至更多,投入很大。因此需要解決商業(yè)模式、產(chǎn)業(yè)合作等問題,目前由哪一方來為車聯(lián)網(wǎng)投資還不明朗,如果政府投資,持續(xù)性很難保證,政府還需要考慮更多優(yōu)先級(jí)更高的投資。作為電信運(yùn)營商企業(yè),投資需要考慮有商業(yè)模式在里面,不僅僅是技術(shù)的選擇,還需要考慮消費(fèi)的需求,需要結(jié)合最終受益者和出資方的想法,面向具體應(yīng)用場景進(jìn)行解決方案的客戶化適配。
例如將V2X運(yùn)用在紅綠燈提醒等輔助類駕駛功能這種場景,老百姓消費(fèi)意愿比較弱,而如果在“兩客一危”上,通過V2I為這些車做安全提示跟車速引導(dǎo),可以有效減少危險(xiǎn)事故的發(fā)生,這樣對(duì)于政府監(jiān)管部門也有積極性去建路測設(shè)備,老百姓也可以從中受益。此外客戶對(duì)于自動(dòng)駕駛的消費(fèi)意愿更加強(qiáng)烈,可以優(yōu)先在車速度低的封閉園區(qū)、高速公路等封閉類的道路應(yīng)用場景來推動(dòng)網(wǎng)聯(lián)化的自動(dòng)駕駛,尋求一兩個(gè)市場接受的應(yīng)用場景,形成良性循環(huán)。
-
運(yùn)營商
+關(guān)注
關(guān)注
4文章
2392瀏覽量
44374 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
783文章
13682瀏覽量
166144
原文標(biāo)題:技術(shù) | 自動(dòng)駕駛及關(guān)鍵技術(shù)V2X研究
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于V2X和自動(dòng)駕駛HIL聯(lián)調(diào)的仿真測試系統(tǒng)開發(fā)

如何應(yīng)對(duì)V2X頻譜挑戰(zhàn)
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
深度學(xué)習(xí)在自動(dòng)駕駛中的關(guān)鍵技術(shù)
未來已來,多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
基于實(shí)車在環(huán)(ViL)的V2X測試方法

羅德與施瓦茨聯(lián)合Autotalks成功驗(yàn)證第三代V2X芯片組性能
V2X與ETC到底有什么不同?
德思特分享 | V2X在做什么?連接未來智能出行的車聯(lián)網(wǎng)(下)
德思特分享 | V2X在做什么?連接未來智能出行的車聯(lián)網(wǎng)(上)
LabVIEW開發(fā)自動(dòng)駕駛的雙目測距系統(tǒng)

如何將V2X技術(shù)應(yīng)用到汽車中?# 車聯(lián)網(wǎng) # V2X # C-V2X
自動(dòng)駕駛下半場競爭的關(guān)鍵技術(shù)

自動(dòng)駕駛四大關(guān)鍵技術(shù)解析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論