 高精度導航定位、全局環境語義,雙目視覺導航方案更適合掃地機器人
高精度導航定位、全局環境語義,雙目視覺導航方案更適合掃地機器人
隨著社會經濟發展水平和人們消費觀念的轉變,更具科技屬性的智能規劃型掃地機器人成為最受費者青睞的智能家居產品。據數據顯示,智能規劃掃地機器人市場占比從17年的10%提升到18年的59%,其中激光導航占76%,視覺導航系統占24%。而隨著視覺導航系統在iRobot、戴森等掃地機器人頭部陣營不斷發酵,關于視覺導航單目、雙目的技術問題,也得到了掃地機器人廠商的廣泛關注。
單目:SLAM無尺度信息,易受噪聲影響
眾所周知,掃地機器人視覺導航系統是通過連續不斷地對機器周圍環境拍攝記錄,并根據特征點或標志物進行房屋建圖,實現導航定位或路線規劃,單目雙目方案,都是如此。不同的是,單目攝像頭在單幀圖像中,無法確定距離物體的真實距離,僅能通過相機的運動形成視差,測量物體的相對深度。也就是說,單目視覺導航方案無法實際測繪出一個物體的真實大小。這個物體可能是個很小卻很近的物體,也可能是一個很大卻很遠的東西。并且,在單目SLAM估計的軌跡和地圖上,與真實的軌跡和地圖相差一個重要因素——尺度,即便結合里程計、IMU進行組合導航,依然無法達到雙目的精度水平。
無法確定真實尺度,這也意味著以測距為基礎的三維立體解算應用在單目傳感器上無法得到有力支持,影響搭載單目視覺導航系統掃地機的智能避障,語義地圖等功能。另一方面,單目SLAM更易受到運動過程中的噪聲影響,穩定性較雙目SLAM低,對復雜環境的適應能力較弱,無法長時間保持定位、規劃的精準性。這也是為什么單目成本更低,市場卻對其響應平平的原因。
雙目:定位精度更高,環境語義更具智能潛力
雙目在硬件結構上更接近人類的雙眼,通過左右目圖像的視差來確定距離,也就是立體視覺。從工作原理上來說,雙目是將左右目拍攝的2D環境圖像通過三維立體解算成帶有深度信息的三維空間結構,更適合掃地機器人實現精度及穩定性俱佳的導航定位效果。并且,基于三維空間的立體解算,掃地機器人在識別障礙物時,可以解算出障礙物距離,大小以及屬性,障礙物識別范圍更廣,類似多線激光雷達,后續的避障便有了更多操作空間。另一方面,結合語義識別,雙目視覺導航掃地機器人可以更好地得到語義地圖,理解房屋布局、空間結構,讓掃地機器人實現如人物目標跟蹤、執行特定語義區域清掃等智能人機交互,甚至擔任無人情況下部分家庭安防工作。
當然,雙目實現這些功能是有前提條件的,雙目視覺導航的一個難點便是相機的同步問題。上文提到,雙目是通過左右目圖像的視差測距的。因此,理論上左右目攝像頭要做到完全一樣,這便需要兩枚攝像頭實現同步。如果兩個攝像頭拍攝時無法達到完全同步,那么就會造成測距的參照物發生錯位,造成不可逆的連鎖誤差。
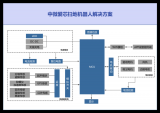
為了解決這一問題,國內新銳計算機視覺廠商INDEMIND軟硬件優化一齊著手。首先通過硬件同步和高精度標定算法,讓攝像頭之間、其他傳感器之間實現微秒級時間同步,實現硬件端低誤差測距。在算法上,搭載自研Vi-SLAM算法,通過構建全局SLAM地圖,實現精準穩定的空間定位,進而掌握清掃路徑和未清掃區域,自主智能完成“補漏式”清掃。并且,基于全局地圖還可實現SLAM丟失后的重定位或開機重定位,提高機器人系統魯棒性。
完成掃地機器人清掃這一基本工作之余,結合語義識別建立的語義地圖,掃地機器人不僅可以“看”還可“理解”障礙物是什么,進而實現最優路徑規劃和全局/選擇性避障,避免漏掃、誤掃。并且,根據語義地圖,使掃地機器人與人之間產生更多交互,如語音命令掃地機器人清掃特定區域、人物活動密集區域著重清掃等,更高效的執行家庭清掃任務。
總的來說,雙目視覺導航是定位精度更高、系統魯棒性更強,更加智能的掃地機器人導航方案,能夠更好地引領掃地機器人向家庭清潔智能助手轉變,隨著技術的不斷進步,可以預見,雙目視覺導航系統將會逐漸成為掃地機器人主流導航定位方案。
發布評論請先 登錄
相關推薦
大疆或明年中期推出高端掃地機器人
掃地機器人廠商iRobot將裁員16%
掃地機器人應用解決方案
霍爾開關在掃地機器人中的應用
愛普生SGPM01助力智能泳池清潔機器人導航方案
掃地機器人避障技術的發展史
供應 英集芯IP2348,適用于掃地機器人解決方案的鋰電池同步降壓充電芯片
機器人高效導航定位背后SLAM專用芯片的崛起
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
EPSON助力智能泳池清潔機器人導航

視覺、激光、結構光?掃地機器人導航避障技術盤點

EPSON愛普生助力智能泳池清潔機器人導航方案應用






 工商網監
工商網監
評論