 為什么是以太網用于運動控制?
為什么是以太網用于運動控制?
就運動控制而言,以太網、現場總線以及其他技術(如外圍組件互連)歷來都是相互競爭的,用以在工業自動化和控制系統中獲得對一些最苛刻要求的工作負載的處理權限。運動控制應用要求確定性(保證網絡能夠及時將工作負載傳送至預定的節點),這是確保位置保持所必需的,這進而又將確保驅動器的精確停止、適當的加速/減速以及其他任務。
標準的 IEEE 802.3 以太網從未達到這方面的要求。即使全雙工交換和隔離沖突域淘汰了過時的 CSMA/CD 數據鏈路層,但它還是缺乏可預測性。此外,典型堆棧中的 TCP/IP 的高度復雜性并未針對實時流量的可靠傳送進行優化。因此,現場總線以及帶有基于 ASIC 的 PCI 卡的 PC 控制架構一直是常見的運動控制解決方案。
從 EtherNet/IP?到 EtherCAT?的以太網解決方案以其獨特的方式克服了這些缺點。盡管工業以太網相較于別的替代技術還有一些其它優勢,然而它在運動控制中還遠沒有占到主導地位。我們來看看它能夠并且將會在未來幾年的競爭中越來越被接受的三個原因。
1
融合而不是增加復雜性
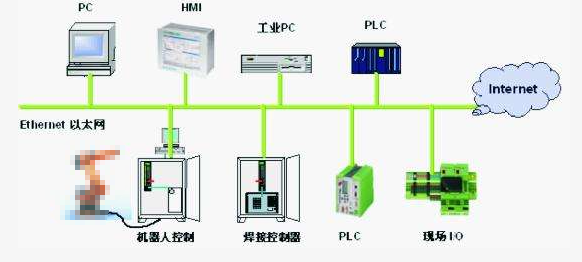
隨著時間的推移,企業 IT 與工廠之間的互聯不斷增加,導致了系統更復雜,往往將標準以太網和工業以太網與現場總線混合使用。
這樣的網絡很復雜,而且它的建立和維護也很昂貴。每個協議都需要各自的實施程序、安裝人員和培訓。相比之下,以太網提供了將適用于運動、安全等的不同網絡融合到經濟高效的基礎架構上的可能性,該架構布線更容易,獲得供應商的廣泛支持,并能適應未來要求。
以太網提供了不同網絡融合的可能性。
EtherNet/IP 協議體現了如何在實踐中充分發揮融合的作用。通過使用 TCP/IP 和 UDP/IP 等標準以太網技術、輔以 CIP Sync(用于實現分布式時鐘 IEEE 1588 精確時間協議同步)等特性,集成的交換式系統可以同時適應商業和工業應用。
2
確定性適用于運動控制應用
運動控制依賴于精確通信。這種精確性通過使用基于時隙的調度來支持,每個設備在調度策略中都有一個與其它設備進行通信的調度表。這些伺服驅動器和控制器計算出它們各自的時序,由此可計算出控制函數的?T值。但是,如果數據傳輸變得無法預測,則可能會丟失結果,因此需要確定性來確保環路的穩定性。
以太網能夠支持工廠中苛刻的運動控制應用。
在某些情況下,通過直接集成于英特爾?芯片內的加速器電路在 EtherNet/IP 中實施 IEEE 1588,只是以太網解決方案用于強制確定性的一種常見機制。EtherCAT 的高速實時處理是運動控制應用中如何實現始終如一的預測性能的另一個示例。EtherCAT 突破了基于 PCI 的集中式通信的嚴格物理限制,即要求機器處理單元和伺服處理器之間可快速通信但需要保持短距離。
Jason Goerges 在發表于2010年Machine Design的一篇文章中解釋道:
基于 EtherCAT 的分布式處理器架構具備寬帶寬、同步性和物理靈活性,可與集中式控制的功能相媲美并兼具分布式網絡的優勢。
事實上,一些采用這種方式的處理器可以控制多達64個高度協調的軸(包括位置、速度和電流環以及換向),采樣速率和更新速率為 20 kHz。
3
面向IIoT的長期可行性
以太網自作為一種局域網技術問世以來,已經過一系列發展。鑒于傳統現場總線組件目前的制造規模較小,而 PCI 正面臨逐漸成為過時的工業標準架構的風險,以太網經過不斷發展,現已完全有能力為以IP為核心的工業物聯網提供服務。
即將到來的改進(如時間敏感型網絡將完善 IEEE 1588 并支持網絡融合的可能性)也使以太網成為當前和未來運動控制的理想選擇。這并不是說現場總線和 PCI 將會消亡,只是隨著自動化行業邁向 IIoT,以太網的優勢將持續提升。
-
以太網
+關注
關注
40文章
5383瀏覽量
171147 -
自動化
+關注
關注
29文章
5519瀏覽量
79114 -
運動控制
+關注
關注
4文章
567瀏覽量
32828
原文標題:為什么是以太網用于運動控制?
文章出處:【微信號:motorcontrol365,微信公眾號:電機控制設計加油站】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
以太網幀格式和功能詳解
以太網幀結構是怎樣的

以太網端口的類型和特性
工業以太網和普通以太網區別在哪


什么是以太網交換機中的網絡延遲

什么是以太網交換芯片技術?它有哪些設備和作用?
工業以太網的基本原理及優勢





 工商網監
工商網監
評論