") 哈工大競技機器人隊的四足機器人獲得了全國季軍,馬術(shù)單項賽競速組冠軍
哈工大競技機器人隊的四足機器人獲得了全國季軍,馬術(shù)單項賽競速組冠軍
每年大學生們的機器人大賽,都會讓人看得激情澎湃。一群初出茅廬的大學生,自己親手搭建機器人,并在賽場上盡情揮灑汗水與激情的場景都會讓無數(shù)人動容。而今年的 Robocon 大賽,由于四足機器人賽題的加入,顯得尤為好看。其中來自哈爾濱工業(yè)大學的四足機器人便深深吸引了我的眼光。
近幾年來,由于種種原因,四足機器人成為很多高校與公司爭相研發(fā)的機器人項目。其中一些國外公司與高校的明星產(chǎn)品,頻頻刷爆我們的朋友圈。但與之對比我們了解到的國內(nèi)四足卻很少,所幸的是今年 Robocon2019 賽題中便有一項關于四足機器人的比賽,從眾多參賽的團隊中也讓我們看到了中國大學生在創(chuàng)造四足機器人的能力上是完全不輸國外學生的。
在比賽中,來自哈工大競技機器人隊的四足機器人動作靈活、速度驚人,并獲得了全國季軍,馬術(shù)單項賽競速組冠軍的好成績。下面就讓我們一起來看一下來自哈工大的四足機器人。
哈工大競技機器人隊
哈工大我們自是不必過多介紹,這所有著近百年歷史的中國雙一流大學,在眾多學科領域的貢獻與排名我們都有目共睹,是一眾莘莘學子們可望而不可即的國內(nèi)頂級學府。
在這所學校中,也成長著一支非常優(yōu)秀的機器人團隊 —— 哈工大競技機器人隊。該團隊成立于 2002 年,由哈爾濱工業(yè)大學校團委的指導和組織,全校各專業(yè)學生自愿報名參加組成。該團隊經(jīng)過 18 年的技術(shù)積淀,建立了機械,控制,硬件,傳感等全面全自主的技術(shù)體系。參與亞太大學生機器人大賽 robocon,全國大學生機器人大賽 robomaster,icra dji 人工智能挑戰(zhàn)賽等國內(nèi)外機器人賽事,和其他各類創(chuàng)新創(chuàng)業(yè)賽事,取得了多次冠軍和全國一等獎等榮譽。
哈工大四足機器人 “踏浪”
Robocon 比賽是亞洲廣播聯(lián)合會(ABU)在 2002 年發(fā)起的一個大學生機器人創(chuàng)意和制作比賽。比賽每年發(fā)布一個新規(guī)則,需要參賽者綜合運用機械、電子、控制等技術(shù)手段完成規(guī)則設置的任務,可以說是本科階段最高機器人賽事。作為高技術(shù)門檻的機器人競賽平臺,自 2002 年來,已經(jīng)成功舉辦了 16 屆,國內(nèi)先后有百余所院校踴躍參加,多年以來參賽的同學親切的將之稱為蘿卜坑。
今年,Robocon2019 賽題中,其中一部分要求是制作一個四足機器人,需要實現(xiàn)直線,轉(zhuǎn)彎,越障,過繩,上坡等功能。哈工大機器人對的隊員們針對賽題,在機械控制和硬件上開展了 8 個多月的研發(fā)工作。最終完成了一個可以實現(xiàn)跳躍和高速奔跑的通用四足機器人 “踏浪”。
“踏浪” 在戶外移動
經(jīng)過幾輪的設計迭代,“踏浪” 被設計為并聯(lián)的8 自由度四足機器人,并搭載了視覺系統(tǒng),通過識別場地中元素,獲得自身位置信息。機械與硬件整體成本還控制在了1 萬元人民幣左右。
收到指令后,撒丫子就跑的 “踏浪”
機械上,“踏浪” 的每條腿使用并聯(lián)構(gòu)型,雖然并聯(lián)構(gòu)型在工作空間和尺寸上有劣勢,但是在出力和速度上較串聯(lián)構(gòu)型有優(yōu)勢,這種方案非常適合電機性能較差的條件。同時采用了主流的低減速比搭配大扭矩無刷電機的驅(qū)動方案。
考慮到成本問題,團隊使用了一級齒輪傳動,大齒輪使用尼龍齒圈小齒輪使用鋁合金齒輪,最終實現(xiàn)了 5.8:1 的減速比。雖然 8 自由度方案,無法實現(xiàn)機器人全向移動,但是通過差動轉(zhuǎn)向的方式,足夠滿足實際需求。
“踏浪” 快速上坡
控制上,使用 stm32 與 FPGA 作為控制算法的硬件平臺,通過自行設計制作的有感 FOC 驅(qū)動器實現(xiàn)對電機的力矩控制,并使用阻抗控制方法實現(xiàn)了腿足的主動柔順效果。在四足逆運動學的基礎上,規(guī)劃足端軌跡,在視覺信息的引導下,最終全自動地完成比賽。使用 IMU 反饋做姿態(tài)穩(wěn)定控制,并在腿足上安裝壓力傳感器,實現(xiàn)碰撞檢測。
“踏浪” 跳躍障礙物
視覺上,使用 Intel 微型電腦作為處理平臺,傳感器使用華碩 Xtion Pro Live 深度相機,與 270 度舵機結(jié)合,實現(xiàn)對賽場環(huán)境的多方位掃描。算法方面以 Point Cloud Library 及 OpenCV 等開源計算機視覺庫為基礎,對深度相機采集的場地特征進行識別分析,得到機器人當前的絕對位置,指導機器人行進及完成特定動作;通過三維點云與二維圖像的結(jié)合與轉(zhuǎn)換,加快算法速度,提高識別效率。
登頂瞬間
下面讓我們欣賞一下有關 “踏浪” 機器人的比賽實況:
桌面級 12 自由度四足機器人
另外,在備賽期間,出于對 12 自由度四足的興趣和宣傳需要,該團隊還設計制作了一款桌面級的四足機器人。可以實現(xiàn)全向移動和機體六自由度控制,并基于 IMU 做了地形適應和自穩(wěn)定功能。動力部分使用 12 個總線舵機,機體采用全 3D 打印結(jié)構(gòu)。
小型桌面四足機器人
這款小四足相比前面的大家伙似乎更可愛了一點,而且也實現(xiàn)了各種功能,看上去真想自己做一個養(yǎng)在家里呢!
小狗 MU 自穩(wěn)
小狗地形適應
小狗全向移動
小狗姿態(tài)控制
而且團隊還將這款桌面級的四足機器人的制作教程發(fā)布到了網(wǎng)上,方便喜歡四足機器人的同學自己動手完成。
有感興趣的同學,可以前往 bilibili 網(wǎng)站搜索視頻教程:
https://www.bilibili.com/video/av49584364
-
機器人
+關注
關注
210文章
28205瀏覽量
206534 -
四足機器人
+關注
關注
1文章
90瀏覽量
15188
原文標題:機器狗“踏浪”!哈工大本科生1萬成本開發(fā)四足機器人
文章出處:【微信號:AI_era,微信公眾號:新智元】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦
七騰機器人:防爆輪式機器人-四輪八驅(qū)全新上線

在NVIDIA Isaac Lab中訓練四足機器人運動

華工科技聯(lián)合哈工大實現(xiàn)國內(nèi)首臺激光智能除草機器人落地
LIG Nex1收購四足機器人制造商Ghost Robotics
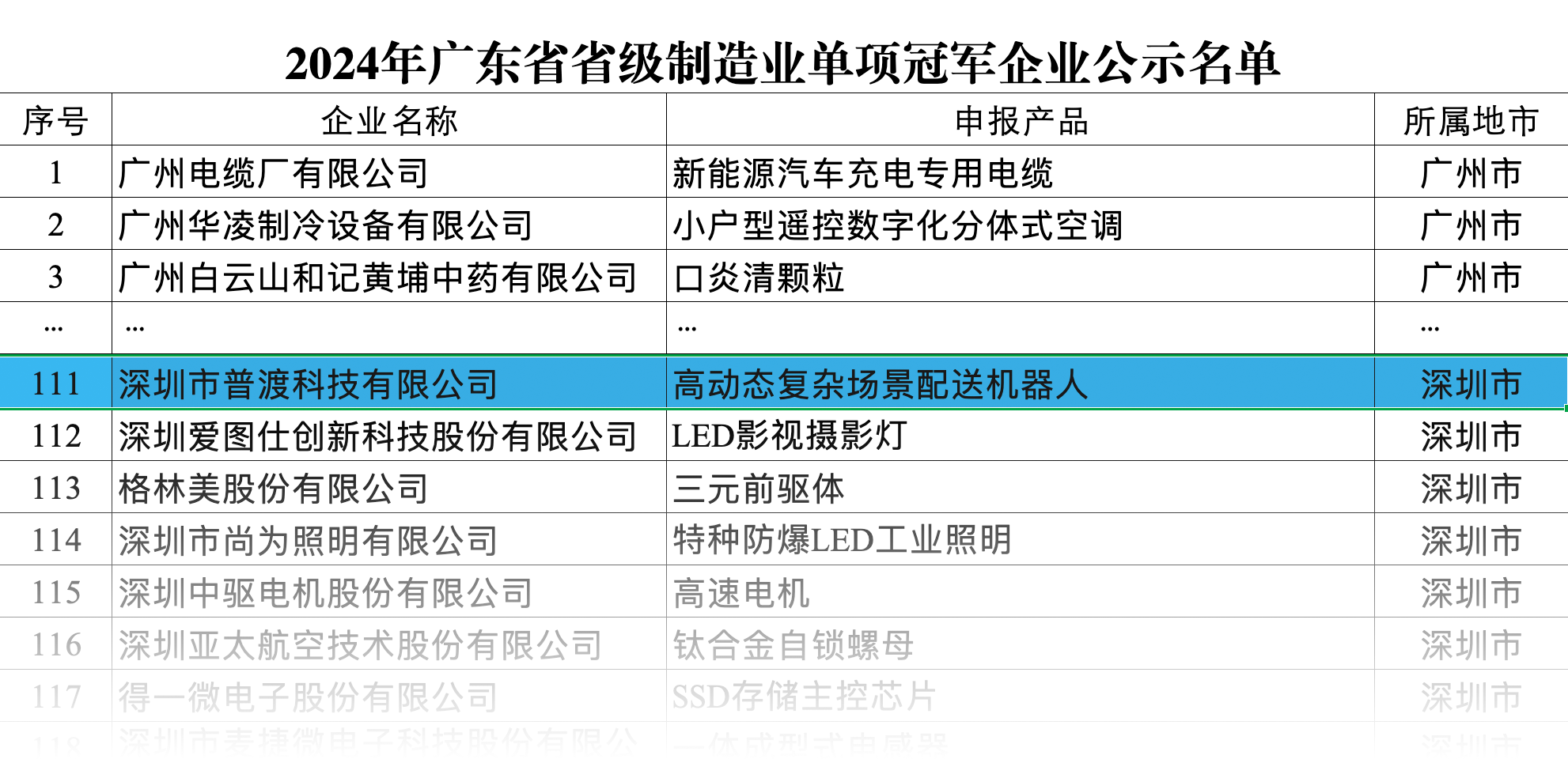
榮譽榜 普渡機器人榮獲“2024年廣東省級制造業(yè)單項冠軍企業(yè)”稱號
Al大模型機器人
小米機器人入駐小米汽車工廠,已研發(fā)鐵大、鐵蛋等機器人
深開鴻與哈工大重慶研究院合作共同開啟智能機器人與協(xié)同技術(shù)的新篇章

深開鴻與哈工大重慶研究院攜手打造智能機器人與協(xié)同技術(shù)新篇章

其利天下技術(shù)·搭載無刷電機的掃地機器人的前景如何?
OpenHarmony人形機器人創(chuàng)新挑戰(zhàn)賽來啦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論