 電子發燒友App
電子發燒友App


汽車防盜報警監控系統的設計
汽車日益成為人們生活中不可缺少的部分,然而,令汽車用戶擔憂的是車輛被盜現象呈逐年上升趨勢。本文旨在設計一個方便可靠,功能強大的汽車報警器。當汽車遭遇到危險情況時,立即啟動警報,同時發送相應信息到指定的手機上,通知車主有異常情況。車主可以通過手機監聽車內情況并控制汽車,以有效地防止汽車被盜。此外,若在車內加一個緊急按鈕,不僅可以在車主遇到搶劫或其他危險情況時,向外界求助,也可以幫助警方對車子進行定位。考慮到時間和成本問題,本文僅針對振動信息的檢測、車輛信息的傳輸與控制問題進行重點研究。
振動信息檢測
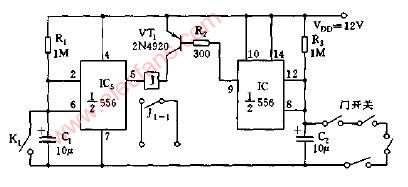
圖1中,當物體有向右的加速度時,由于慣性,中間擋板與電容板間距隨之變化,從而造成電容值的變化(也有通過改變電容板的面積實現電容變化的)。經過后續開關電容、單位增益放大、電荷放大電路等一系列處理就可以得到與加速度信息成正比關系的電壓信號。系統采用的MMA7260QT加速度傳感器就是基于上述原理。

傳統的防盜報警器側重于對瞬時振動、沖擊的檢測,雖然可以識別出車門遭遇暴力打開的情況,但極易造成誤判報警(如附近的異響導致報警)。針對以上問題,本文采取了以下三點改進措施:
(1)增加了對車門打開動作的檢測,提取車門打開時的加速度信息作為車輛被盜的依據之一。
(2)適當選取車門被暴力打開的特征時間,而不是單純依靠加速度峰值越界作為車輛被盜的依據。
(3)增加了對車體傾斜角度的測量,防范拖車和整車搬運等盜竊手段。
車輛信息的傳輸與控制
將傳統防盜報警技術與現代GSM數字移動通信技術相結合,就可以實現車輛狀態監控、調度、防盜報警、防劫報警、遠程控制、跟蹤定位、車載電話等功能。系統采用SIEMENS公司的TC35i GSM Modem模塊,這樣就可以突破空間限制,將車輛信息通過GSM網絡傳送至全球各地。由于系統需要眾多功能模塊的支持,限于時間和成本問題,本文僅通過以下兩點驗證了系統的可行性和實用性:
(1)將車輛的當前狀態發送到指定的手機上,要求能夠分辨出車輛被竊的信息來源:車門振動、車輛傾角異常、非法人員進入等。
(2)手機發送指令到GSM Modem模塊上,要求只有設定的手機號碼才能得到系統的控制權,能夠區分不同的控制指令并執行。
系統概述
系統結構框圖
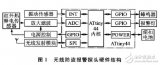
如圖2所示:以MC9S08QG8單片機為核心,輔以MMA7260QT加速度模塊、HOLUX GM-82 GPS模塊、TC35i GSM Modem模塊等功能模塊實現對汽車的實時監控。電源部分擬采用車載蓄電池做主電源;一旦主電源被切斷,即切換到內置電池供電,進入節能模式,有效工作達數月以上。

系統硬件
MC9S08QG8單片機及其外圍電路
該型號單片機是Freescale公司主推的8位單片機,它的幾項內置功能與汽車防盜報警系統的要求正好吻合,所以用它作系統核心。
單片機的最小系統使用Synhayato公司的CT298開發板。基板主要由以下幾部分組成:單片機(MC9S08QG8)、USB-mini B型連接器、電源和復位開關、USB-COM轉換器(FT232R)、BDM工具連接頭、輸入輸出器件(按鈕鍵,LED燈,蜂鳴器)、MM-2860用插座、外部擴展連接槽(柵距為1mm、16引腳扁電纜連接槽)和測試端口。
MMA7260QT加速度模塊及其外圍電路
現代汽車的防盜系統通常采用對車體的沖擊、振動監測的方式預警,常用的器件多為磁效應傳感器。由于磁效應加速度傳感器自身的一些問題,會使得后續信號處理電路和微控制器接口電路復雜,致使系統報警的可靠性降低,誤報率較高。另外,對付拖車或整車搬運最有效的方法是對車體的傾斜角度進行監測,而磁效應傳感器無法測量靜態加速度,不能對車體的傾斜角度進行測量。MMA7260QT是Freescale公司設計生產的單芯片集成三軸加速度傳感器,它可以對車體微小振動和整車的傾斜角度同時進行監測。將其應用于汽車防盜系統不但擴大了系統的監測范圍,而且簡化了系統,提高了防盜系統報警的可靠性。
MMA7260Q的內部模塊結構是在單一芯片上集成三個相互獨立、測量方向相互垂直的敏感元的測量模塊,是由多晶硅微加工表面工藝制成的電容式加速度傳感器;由硅片表面的彈性結構支撐起的質量塊下面貼附電容的一個極板,電容的另一極板固定。當加速度引起質量塊的相對位置變化時,電容值也發生變化,然后經過電容電壓轉化電路和放大濾波電路后輸出與加速度成正比的電壓信號。
TC35i GSM Modem模塊
TC35i 是Siemens公司推出的新一代GSM通信模塊。TC35i無線模塊尺寸小巧,安裝設計靈活,易于集成且功耗低。模塊有AT命令集接口,支持文本和PDU模式的短消息、第三組的二類傳真、以及2.4k、4.8k、9.6k的非透明模式。TC35i模塊主要由GSM基帶處理器、GSM射頻模塊、供電模塊(ASIC)、閃存、ZIF連接器、天線接口六部分組成。作為TC35i的核心,基帶處理器主要處理GSM終端內的語音、數據信號,并涵蓋了蜂窩射頻設備中的所有的模擬和數字功能。在不需要額外硬件電路的前提下,可支持FR、HR和EFR語音信道編碼。
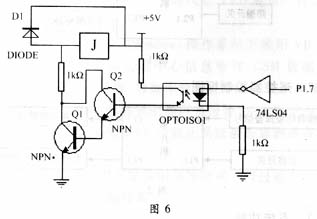
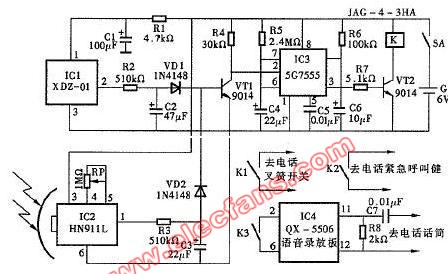
其它輔助電路
除了上述主要功能電路外,系統還包括一些輔助電路。它們主要是:3.3V穩壓電源(CT-298開發板上的穩壓電源提供的電流有限,不能負擔整個系統的供電),由TI公司的TLV2217-33 LDO和一些電容構成,能夠提供500mA的電流;串口電平轉化電路(方便與TC35i進行連接通信),主要由MAXIM公司的MAX3232構成,提供TTL電平與232C電平的轉化;LED指示燈驅動電路以及按鍵電路等。
系統軟件
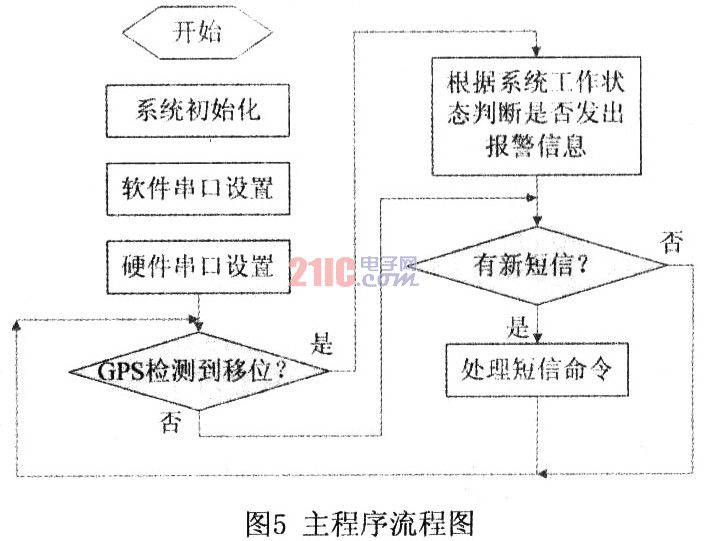
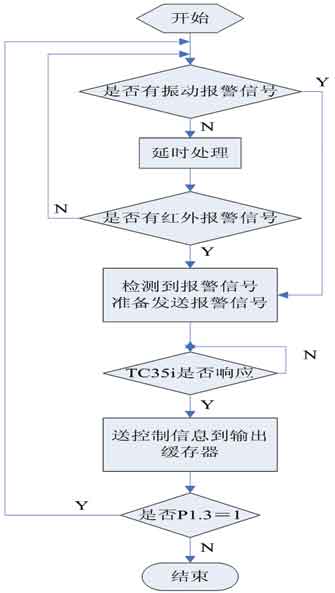
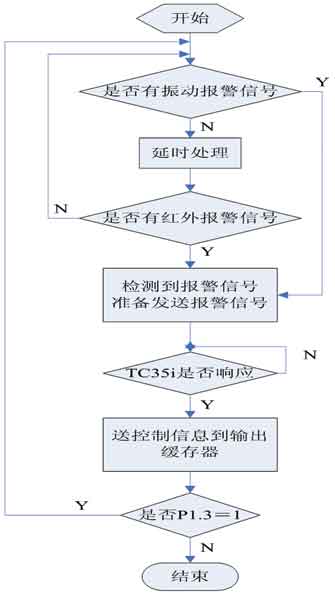
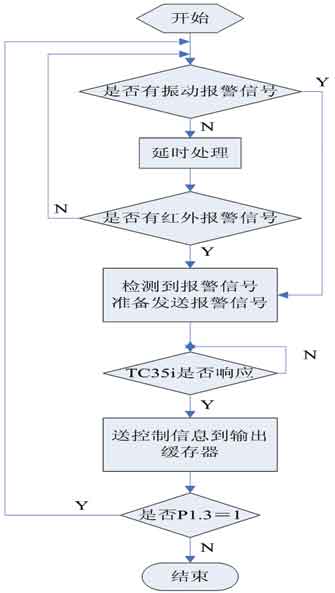
系統軟件的整體設計思路
系統主要包含四種工作狀態:停車狀態、行駛狀態、被盜狀態和被搶狀態。單片機首先判別停車狀態和行駛狀態,這主要依靠密鑰識別技術實現。密鑰識別有很多種,本文設想采用射頻識別技術(RFID,Radio Frequency Identification)。它的基本原理是利用射頻方式進行非接觸雙向通信,以達到識別目的,并交換數據。RFID系統的射頻卡和讀卡器之間不用接觸就可完成識別,通過對RFID卡進行讀寫操作,可實現對各類物體或設備(人員、物品)在不同狀態(移動、靜止或惡劣環境)下的自動識別和管理。RFID卡可存儲128字節的數據,前4字節為ID號,該ID號是全球唯一的,可作為車主身份識別標志,剩余字節可用于存儲一些輔助的校驗信息。
在停車模式下,單片機會依次檢測振動信息、傾角信息、車門信息、點火信息、人員信息是否正常,系統將綜合上述信息判斷車輛狀態。如果判斷結論為車輛被盜,則系統進入被盜模式。系統會首先將信息發送給車主,然后將控制權交予車主,車主可以查詢車輛的位置、車內的人員信息,還可以進行啟動高分貝聲光報警,關閉發動機、斷油斷電等操作。如果結論是車輛正常,則系統回到起始狀態,再次循環。在行駛模式下,系統將不斷查詢求救按鈕是否按下,一旦求救按鈕按下,車輛將進入被搶模式。系統會首先將信息發送到指定的手機號碼上(例如車主朋友),然后控制權交予控制中心(通過指定的手機號碼),控制中心同樣可以執行上述控制操作。

振動、傾角信息的提取和判別
由上文可知,我們需要從加速度信息中提取出以下三種信息:撬鎖時車體振動、車門打開時的加速度信號、車輛的傾角變化。它們的波形如圖3所示,在正常情況下,如圖中的平穩區所示,X、Y、Z三個方向的加速度基本不變(但是有輕微的擾動)。有人撬鎖時,加速度值會出現一個減幅震蕩的過程,震蕩的周期很短,只有十幾毫秒。而在車門打開的過程中,加速度值會出現一個很大的變化,并且持續的時間較長,能達到上百毫秒。
經分析我們可以發現,撬鎖振動和車門打開時的加速度值都與加速度變化的速度有關,更適合用差分來表示;傾角的變化只與加速度值變化的大小有關,而與變化的速度無關,可以直接用當前的加速度來表示。針對聲波振動所造成的誤報,本文采用兩種辦法:由于聲波振動的頻率遠高于撬鎖振動的頻率,適當降低ADC的采樣頻率就可以濾去大部分,系統的采樣頻率是1000Hz;若干項相鄰差分值加權平均,這相當于低通濾波的作用,也可以濾除聲波造成的振動,系統采用3項加權平均。假設ADC采樣量化后的值為
A=a(1)+…+a(i-1)+a(i)+a(i+1)+…
加權系數為M1、M2、M3,
則加權平均處理的公式為b(i)=[M1*a(i-1)+M2*a(i)+M3*a(i+1)]/(M1+M2+M3)
對于傾角的檢測通過現在的加速度值與平穩狀態下的加速度值作差得到,設初始加速度值為a(0),則當a(i)-a(0)的絕對值大于設定值時即可認為傾角變化超標,啟動報警。ADC初始化的部分程序如下:

車輛信息的傳輸與控制
車輛信息的傳輸與控制主要依靠的是Siemens公司的TC35i GSM Modem模塊。單片機通過串口對TC35i寫AT指令,從而達到信息的傳輸與接收的目的。
單片機控制TC35i收發信息的主要程序如下:


MC9S08QG8單片機編程注意事項
MC9S08QG8單片機不同于一般的51單片機,在編程時有一些值得注意的地方,特列舉如下:
1) SOPT1寄存器寫入問題:SOPT1是一個單次寫入寄存器,每次復位后只能寫一次。所以它的每個位要一次寫入,而不能分多次寫。比如下面語句
則單片機只認為第一條指令有效,而后面的語句無效。這樣就造成外部中斷復位腳可用,看門狗定時器卻不能關閉。應該寫成以下形式
![]()
2)片內起振狀態下ICS Trim Register(ICSTRM)寄存器一定要設置。這個寄存器就是用來調節內部振蕩器的時鐘頻率的,因為內部振蕩器是采用半導體工藝制成的,不同芯片的振蕩頻率會有偏差,Trim寄存器就用來調整這個偏差。調整值一般在出廠時就寫在芯片的固定位置上了,直接使用即可。但是BDM調試時會根據設定的頻率對其進行調整(可能與上電復位的初始值不同),將造成時鐘頻率微小改變,從而BDM調試狀態與掉電復位后的時鐘頻率不同,在SCI通信時造成波特率不準。












 工商網監
工商網監
評論