 電子發燒友App
電子發燒友App


步態加速度信號的無線采集系統設計
?為實現步態加速度信號的無線采集,提出一種基于內嵌8051的無線收發芯片CC1010的有效方法。簡要介紹步態加速度信號無線采集系統的工作原理,詳細說明該系統的軟硬件設計與實現。系統采用路由和重傳機制,以確保數據的可靠傳輸。利用本采集系統成功建立一個36人的步態加速度數據庫,可供不同領域的步態研究者進行分析。
關鍵詞 步態加速度 CC1010 MMA7260 路由 無線采集
步態,即人走路的姿勢。作為一種生物特征,它具有不受距離影響、非侵犯性、難以偽裝、受環境影響小等獨特的優點,因而近年來備受關注。國內外的許多知名大學和研究機構,如美國麻省理工學院、中國科學院自動化研究所等,都廣泛展開了步態識別研究工作[1]。步態的獨特性為人的身份識別和認證提供了有效線索,對醫療上的異步病態、偏癱等疾病的預防、診斷和康復也可以起到很顯著的輔助作用。而且,在現代化的體育訓練中,也可以通過步態特征來監測運動員的體能消耗情況、動作準確程度等,制定科學的訓練方案。此外,步態在機器人的行走、人的行為理解等科學研究上也占有舉足輕重的地位。
目前,國內外的步態研究都剛剛起步。各個步態研究領域都需要大量可靠的原始步態數據。現在公開的步態數據庫主要有南安普敦大學的SOTON步態數據庫、麻省理工學院的MIT步態數據庫、卡內基梅隆大學的CMU步態數據庫,以及中國科學院自動化研究所提供的NLPR步態數據庫。以上數據庫都是基于圖像的。然而,動態環境中拍攝的圖像受光照變化、運動目標的影子等多方面因素的影響,會給基于圖像的步態特征提取帶來較大困難。所以,Heikki Ailisto等人[2-3]提出一種采用加速度傳感器來獲取步態數據的新方法,避免了動態環境中多方面因素對捕捉圖像的不利影響,降低了數據處理的難度,開辟了步態數據獲取的新途徑;但此方法采用裝備有DAQ1200數據采集卡的筆記本電腦來采集數據,不僅成本高,而且不便于測試對象攜帶。
步態加速度信號的提取方法成了步態研究的一個瓶頸;但是,隨著各項技術的迅速發展,自動化、智能化的采集步態加速度信號成為了可能。
本文提出了一種基于無線收發芯片CC1010的步態加速度信號無線采集的有效實現方法。該方法采用三軸加速度傳感器MMA7260測量步態的加速度信號,并用Chipcon公司的內嵌8051的無線收發芯片CC1010作為核心控制器,控制其內置的模數轉換器對加速度信號進行采樣、A/D轉換,然后在無線發射模塊和接收模塊間借助于路由實現了步態加速度信號可靠的無線傳輸。該采集系統由450 mAh的鋰電池為其供電,可脫機使用。
1? 系統設計原理
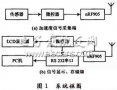
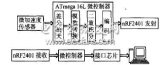
首先使用三軸加速度傳感器來感測人行走時產生的三維加速度信號, 然后由A/D轉換器對模擬信號進行采樣并轉換為數字信號,送至微處理器作預處理。處理后的步態加速度數據通過無線發射電路送至路由,再由路由轉發給無線接收裝置。最后步態加速度數據通過串口被送入計算機,可以供不同領域的步態研究者使用。圖1為步態加速度信號無線采集系統的結構框圖。步態加速度信號無線采集系統由發射裝置、路由裝置、接收裝置和PC機4部分組成。發射裝置由三軸加速度傳感器電路、A/D轉換電路、單片機和無線發射電路組成。路由裝置由無線收發電路組成。接收裝置由無線接收電路、單片機及串口電路組成。PC機部分主要由PC機及串口通信軟件組成。

圖1? 步態加速度信號無線采集系統結構框圖
2? 硬件電路設計
硬件電路主要包括CC1010與天線之間的RF收發電路、CC1010與加速度傳感器的接口電路、按鍵控制電路、LED指示電路及報警電路。
硬件電路的核心部分是無線加速度傳輸模塊。此模塊既要滿足發射與接收裝置的功能要求,體積還要盡可能的小,以便于攜帶。這使得硬件電路的設計工作有很大的難度。如何做出高質量的PCB板成為整個設計的重點。PCB板設計主要包含原理圖設計、布局設計和布線設計。
2.1? 系統原理圖設計
原理圖的好壞直接影響布局、布線的難度,以及最后板子的性能。為了布局布線時能清晰地進行分區設計,設計原理圖時應該把數字電路、模擬電路和RF電路分開;同時分清關鍵電路與非關鍵電路以及哪些元器件對位置有要求。在無線傳輸模塊設計中,CC1010的RF_IN(4腳)、RF_OUT(5腳)、L1(10腳)、L2(11腳)等為RF電路,也為關鍵電路。其ADC相關的加速度傳感器電路為模擬電路。對于模擬器件的電源端,如AVDD_ADC(1腳)、AGND_ADC(64腳)、AVDD_MIX_IF(2腳)、AGND_MIX_IF(3腳)、AVDD_LNA_PA(6腳)、AGND_LNA_PA(7腳)、AGND_PA(8腳)等,應慎重考慮濾波性能,盡量避開數字電路部分的噪聲干擾。此外晶振電路也為關鍵電路,而LED指示和按鍵等電路則屬非關鍵電路。
設計原理圖時,除了要考慮功能的實現、原理的正確外,還要考慮器件的選擇。首先,選擇的器件應該在市場上容易買到;其次器件的封裝既要滿足PCB板尺寸的要求,又要考慮焊接的難易程度。對帶RF的PCB板來說,器件最好能選擇貼片封裝的,以降低不必要寄生參數的影響。
(1)? CC1010與天線間的RF收發電路的設計
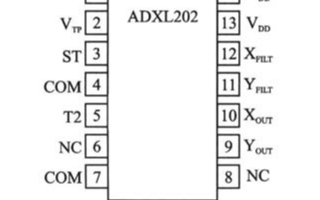
本設計采用了Chipcon公司推出的單片、多頻段、低功耗、超高頻射頻芯片CC1010。芯片采用0.35 μm CMOS技術制成,內嵌高性能的8051微控制器、32 KB的Flash程序存儲器、2 048+128字節SRAM、3通道10位ADC、4個定時器、2個PWM、2個UART、SPI及26個通用I/O等。CC1010適用于家庭自動化、安防系統、遙控開鎖、遙感勘測、遙控玩具等諸多無線應用領域。本設計采用CC1010實現步態加速度信號的無線采集。
RF收發部分的電路如圖2所示。C31為輸入匹配電容,L32為輸入匹配電感,同時L32還用于阻止直流偏置信號的輸入;C41、C42和L41共同實現發射輸出電路的匹配。通過CC1010內部的發射/接收開關電路,收發器得以通過同一個50 Ω的天線進行發射/接收操作。L1、C8和C9組成一個低通濾波器,濾除高頻諧波并且增加了頻率的選擇性,其阻抗為50 Ω。元器件參數既可以按照CC1010datasheet[2]上所給的值,也可利用Chipcon公司的SmartRF Studio軟件得到。

圖2? 步態采集系統無線收發部分電路原理
壓控振蕩器內嵌在CC1010芯片內,使用時只需要外接一個電感L101。電感最好選擇線繞電感,根據所給參考值焊接上。然后用頻譜儀查看其頻率,根據其中心頻率是否滿足要求,適當調整其參數。L101應盡量靠近CC1010,并相對10和11兩個引腳呈對稱布置,其封裝應選擇0402或0603的小型封裝。
一般可選擇單鞭天線、螺旋天線或在PCB上的環形天線。單鞭天線的長度為波長的1/4,可通過式L=7125/f計算。其中,L表示單鞭天線的長度,f為發射/接收頻率。環形天線布在PCB上,使用非常方便;但由于其福射能力較差,所以接收/發射性能也稍差些。螺旋天線是單鞭天線和環形天線的一種折中方案,其尺寸大小和接收/發射能力介于兩者之間。可根據需要選擇合適的天線。一般來說螺旋天線更加實用。
(2)? CC1010與加速度傳感器的接口電路設計
本無線采集系統采用了Freescale公司最新推出的一款低成本、單芯片、三軸加速度傳感器MMA7260。該微型電容式加速傳感器融合了信號調理、單極低通濾波器和溫度補償技術,并提供了4種加速度測量范圍,分別為±1.5 g、±2 g、±4 g和±6 g。
在CC1010與MMA7260的接口中,首先要考慮噪聲問題。因為MMA7260內部采用了開關電容濾波器,有時鐘噪聲產生,所以需要在MMA7260的XOUT、YOUT和ZOUT三個輸出端分別接RC濾波器;其次要考慮電壓匹配問題,由于X、Y、Z軸方向的電壓輸出是0.45~2.85,CC1010的ADC最大輸入范圍是0~VDD。此處VDD為3.3 V,其范圍恰好在ADC的輸入范圍之內,所以不用考慮額外的分壓電阻。CC1010與MMA7260的接口電路如圖3所示。R31/C31、R41/C41、R51/C51用于濾除MMA7260內部采樣的開關噪聲,GS1、GS2用于量程選擇。

圖3? 加速度傳感器電路原理
(3)? 按鍵控制、LED指示與報警電路
本無線采集系統有3個按鍵S1、S2和S3。其中S1是系統復位鍵。S2是模式選擇鍵,可使采集系統處于自動工作方式或手動工作方式。采集系統若工作于自動方式,采集與無線傳輸同步進行;若工作于手動方式,則先把加速度數據存儲到存儲器中,等按下數據發送開始按鍵后再啟動無線發送。S3是數據采集開始/停止鍵,用來控制數據采集的開始、停止以及手動工作模式時采集完畢后的數據發送鍵。LED指示電路包含電源指示燈、發送信號指示燈和接收信號指示燈。報警電路由放大電路和蜂鳴器組成,當數據采集完成時,蜂鳴器自動報警。
2.2? 布局設計
良好的布局是布線成功的前提,布局時應按左端輸入右端輸出的信號流方向放置元件,并且重點考慮以下幾個方面:
①? 首先在Protel中的Keepoutlayer層畫出能承受的最大尺寸,讓布局始終做到心中有數,不至于PCB板尺寸不合適;
②? 本無線采集系統的放置位置要求天線必須位于PCB板的右上角。射頻信號通路越短越好,所以RF電路也應該布局在右上角。RF電路部分的器件應該盡量緊湊,如L101應盡量靠近CC1010,并相對于它的10和11兩個引腳呈對稱布置。對于RF_IN和RF_OUT應該遵守緊湊、暢通、阻抗保持均勻不突變這三個原則。
③? 模擬電路分區中最好沒有數字電路存在,否則模擬信號非常容易被數字噪聲干擾。
④? 晶振應該盡量靠近CC1010,并與其XOSC_Q1(18腳)和XOSC_Q2(19腳)成對稱放置,晶振兩端的15 pF電容盡量靠近晶振。
2.3? 布線設計
布線是PCB設計的最后一步。為保證RF電路部分的良好性能,需全手工布線,并遵循以下規則:首先保證RF、晶振等關鍵電路的布線暢通,最好都在頂層布線;其次保證A/D部分的布線暢通;最后是按照一定順序布線。本設計是從右上腳按逆時針方向布線的。
3? 軟件部分設計

圖4? 采集系統程序流程
采集系統的軟件流程如圖4所示。軟件部分主要包括初始化程序、按鍵處理程序、A/D轉換、數據存儲、接收和發送程序。其中初始化程序包括單片機端口初始化、RF部分初始化、ADC部分初始化和T0初始化。在按鍵處理程序中,Key2為自動方式和手動方式選擇鍵。若為自動方式,則實時發送數據;若為手動方式,則等數據采集完成后,按下Key1才會發送。
4? 測試結果及分析
為了檢測步態加速度信號無線采集系統的可行性,筆者做了以下實驗。實驗場所為走廊,采集系統的發射裝置由測試對象隨身攜帶,全部放在腰帶的正后方,像攜帶手機一樣,只是位置在脊椎骨與腰帶的交叉點處,同時保證MMA7260處于測試標準位置,即其X軸、Y軸和Z軸的正方向分別指向人前進的方向,人體的正左方和人體的正上方。路由放在實驗室門口,保證其與發射裝置可視。無線接收裝置通過串口與實驗室的PC機相連。
測試對象共36個人,其中16男20女,年齡在24~30周歲之間。測試中,要求所有測試對象都穿平跟鞋,在走廊內盡量以正常的步速沿直線行走。每個測試對象要測5組,結果共得到1 800組數據,每組數據中都含有X軸、Y軸和Z軸三個方向上的數據。
每個測試對象測試完畢后,其連續測量的5組步態加速度數據隨之保存在PC機,部分數據如圖5所示。圖5中的第一列數據為數據的序號,試驗中要求每個測試對象每組采集5 000個數據;第2、4、6列表示數據所占模數轉換的通道號;第3、5、7列就是相應通道的加速度數據。

圖5? 測量到的步態加速度數據
實驗中,對所有測試對象的X軸、Y軸和Z軸三個方向的數據都采用相同的方式進行處理。計算機接收到這些數據后,首先對這些數據進行歸一化處理,使其都在0~1的范圍內。這樣,在Matlab中利用PLOT()函數,就可以形象地看到步態特征信號的波形。
下面以16號測試對象的Z軸方向上的數據為例進行說明。18號測試對象Z軸方向的部分步態加速度數據,如圖5中第3列數據所示。在Matlab中,可以得到其相應的波形,如圖6所示。從信號的輪廓可以看出,步態信號是周期性信號。因為“左”步態和“右”步態不一定完全對稱,因此信號被劃分為a步態和b步態。
圖7為16號和18號測試對象在Z軸方向的速度信號。從圖7可以看出:不同的測試對象,其加速度信號的幅度、周期以及變化的速率等有著明顯的差異。
圖6? #16的Z軸方向加速度信號

圖7? #16和#18測試對象Z軸方向加速度信號
5? 結論
通過以上實驗得知,內嵌8051的無線收發芯片CC1010大幅度簡化了電路設計;同時因為CC1010采用3.3 V電源供電,且在不工作時處于休眠狀態,大大降低了采集系統的功耗。實驗中,步態加速度無線采集系統的功耗,信號穩定性和靈敏度都達到了預期的效果。
本文提出的基于無線收發芯片CC1010的步態加速度信號無線采集系統的實現方法,具有方便、直接、有效的優點。該采集系統性價比高、體積小、便于攜帶,可以應用于人的身份識別、醫療技術、體育訓練以及運動健身等領域,具有實際應用價值。













 工商網監
工商網監
評論