 電子發燒友App
電子發燒友App


摘要:冷卻風扇是大功率芯片(如CPU、FPGA和GPU)和系統的溫度管理中的重要部件。不幸的是,它們有時會帶來令使用者討厭的音頻噪聲。通過測量溫度并相應地調節風扇速度,在溫度較低時可最大限度降低風扇速度(和噪聲水平),但是在最壞情況下為防止芯片損壞,要提高速度。本文討論了自動控制冷風扇速度的兩種技術。
高速芯片通常會逐漸變熱。它們跑得越快就會越熱。新一代的高速數字芯片使用了更小尺寸的工藝,允許降低電源電壓,這會有一些幫助,但是晶體管數量的增加比電源電壓的降低要快,因此功率水平仍然在上升。
當晶片溫度上升時,性能會受到影響。參數改變、最大工作頻率降低,而且定時超出規定。從用戶的角度來看,發生這些情況時,產品不再正常工作。因此,冷卻高速芯片的首要原因就是在盡可能長的工作時間和最寬的環境條件范圍內保持良好的性能。滿足參數規范的條件下,高速芯片的最大允許溫度取決于工藝和芯片的設計方法(芯片工作在何種“接近邊緣”的程度),以及其他一些因素。晶片典型的最大溫度范圍是+90°C至+130°C。
超出性能開始惡化的臨界點工作時,過高的晶片溫度會給晶片造成災難性的損害。最大晶片溫度通常遠高于+120°C,并且由諸如工藝、封裝和處于高溫條件的時間等因素而定。因此,高速芯片需要被冷卻以免達到性能惡化和導致永久性損壞的溫度。
高速芯片很少使用單一的冷卻技術。實際上,一般需要結合多種技術以確保高性能和持續可靠性。散熱片、熱管、風扇和時鐘節流是高速芯片最常用的冷卻手段。最后兩個,風扇和時鐘節流,能夠幫助解決熱問題,但它們會引入自身的問題。
風扇能大幅度地降低高速芯片的溫度,但它們也能產生大量的音頻噪聲。全速運轉的冷卻風扇的噪聲會令很多消費者厭煩,也正成為政府機構所關心的問題,即工作場所中為時已久的噪聲效應。根據溫度來調節風扇速度能明顯地降低風扇噪聲;當溫度低時,風扇可緩慢運轉(可非常安靜),當溫度上升時,則加速運轉。
時鐘節流—降低時鐘速度來減少功耗—通過降低系統性能來發揮作用。當時鐘被節流時,系統繼續工作,但是在降低的速度下工作。很明顯,在高性能系統中,只有在絕對需要時,即溫度達到將停止工作時刻時,才能實行節流。
基于溫度控制風扇速度或時鐘節流需要首先測量高速芯片的溫度。這可通過靠近目標芯片——直接相鄰或有時在下面、或在散熱片上放置一個溫度傳感器來實現。這種方式測量出的溫度與高速芯片的溫度相對應,但明顯偏低(相差多達30°C),并且測量溫度和晶片溫度之間的差異會隨著功耗的增加而增大。因此,電路板或散熱片的溫度必須與高速芯片的溫度相關起來。
對于許多高速芯片,有更好的解決方案。許多CPU、圖像芯片、FPGA和其它高速IC包含了一個“熱二極管”,實際上是連接為二極管的雙極型晶體管,位于晶片上。將遠程二極管溫度傳感器與此熱二極管相連,能夠直接測出極其精確的高速芯片溫度。這不僅繞開了在IC封裝外測量溫度時所遇到的大溫度梯度問題,而且還消除了很長的熱時間常數問題,從幾秒到幾分鐘,提高了對于晶片溫度變化的響應速度。
對于風扇控制的需求迫使設計者做出幾個關鍵選擇。第一個選擇是調節風扇速度的方法。調節無刷直流風扇速度的常用方法是調整風扇的電源電壓。這種方法可在電源電壓最低到額定值的40%時很好地工作。但有一個缺點。如果使用線性調節器件來改變電源電壓的話,則效率很低。使用開關電源可以獲得更好的效率,但會增加成本和元件數量。
另外一個流行的風扇速度控制技術是用一個低頻PWM信號驅動風扇,一般在30Hz范圍內,通過調整該信號的占空比來調節風扇速度。因為只用單個小開關管,因而這種方案的成本低廉。由于晶體管作為開關使用,所以效率很高。可是,該法的不足之處就是風扇會多少有些噪聲,這是由脈沖方式的電源引起的。PWM波形的快速邊沿會引起風扇的機械結構移動(有點像設計很差的揚聲器),因而產生聽得見的噪聲。
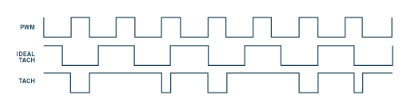
另外一個風扇控制的設計選擇是是否測量風扇速度,以便作為控制策略的一部分。除了電源和地,許多風扇都有第三根線,該線向風扇控制電路提供“轉速計”信號。轉速計輸出在風扇每旋轉一圈時產生特定數量的脈沖(例如兩個脈沖)。一些風扇控制電路將這種轉速計信號作為反饋,調節風扇電壓或PWM占空比以獲得期望的RPM。更簡單的方法是忽略任何轉速計信號,只調節風扇驅動加速或減速。該方案的速度控制精度較小,但成本更低,并且至少省卻了一個反饋環,簡化了控制系統。
在一些系統中,限制風扇速度的變化速率也很重要。當系統與用戶非常接近時,這一點尤其重要。有些情況下簡單地開關風扇或當溫度變化時立即改變速度是可接受的。可是,當用戶就在附近時,風扇噪聲的突然變化會格外顯著且令人討厭。將風扇驅動信號的變化率限制在一定限度以內(如1%每秒)會最大限度降低風扇控制的聽覺效果。風扇速度同樣改變了,但不會特別引人注意。
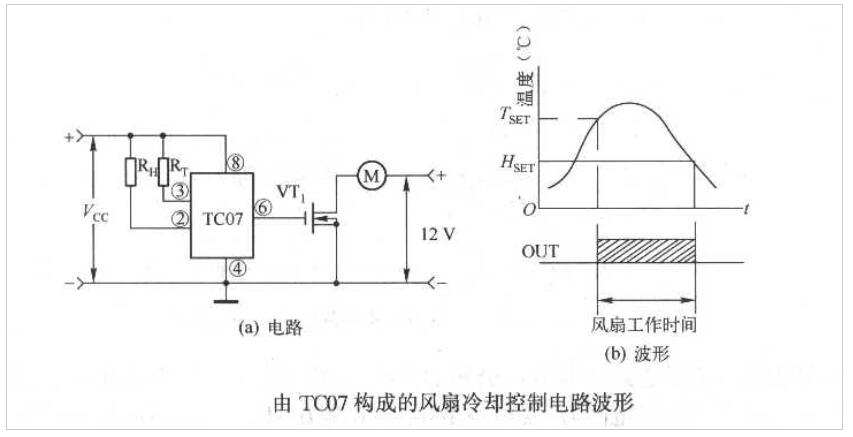
另外一個重要的設計因素是風扇控制策略。通常情況下,風扇在特定的溫度門限以下關閉,當超過門限后開始低速旋轉(例如全速度的40%)。當溫度上升時,風扇驅動隨溫度線性增長,直至100%的驅動。最佳斜率依賴于系統要求。更大的斜率一定程度上可獲得更穩定的芯片溫度,但當功耗隨時變化時,風扇速度的變化量更大。如果目標是高性能,則應該選擇起始溫度和斜率,以使風扇在晶片溫度高到足以啟動時鐘節流之前達到全速運轉。
風扇控制電路可以多種方式實現。具有多達5個測量通道的多種遠端溫度傳感器可直接檢測高速芯片的溫度,并將溫度數據傳送給微處理器。具有多個風扇轉速計監視通道的風扇速度調節器可對風扇RPM或電源電壓提供可靠的控制,并可接受來自于外部微控制器的命令。為了降低成本和簡化設計,單片封裝內包含了溫度測量和自動風扇控制的IC已有市售。傳感器/控制器一般也包含了過溫檢測,可用于時鐘節流或系統關斷,因而可避免高速芯片因過熱而災難性損毀。
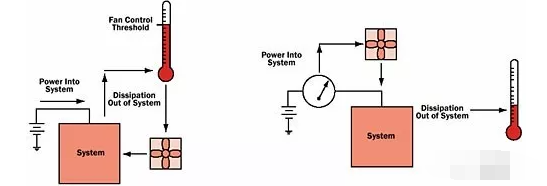
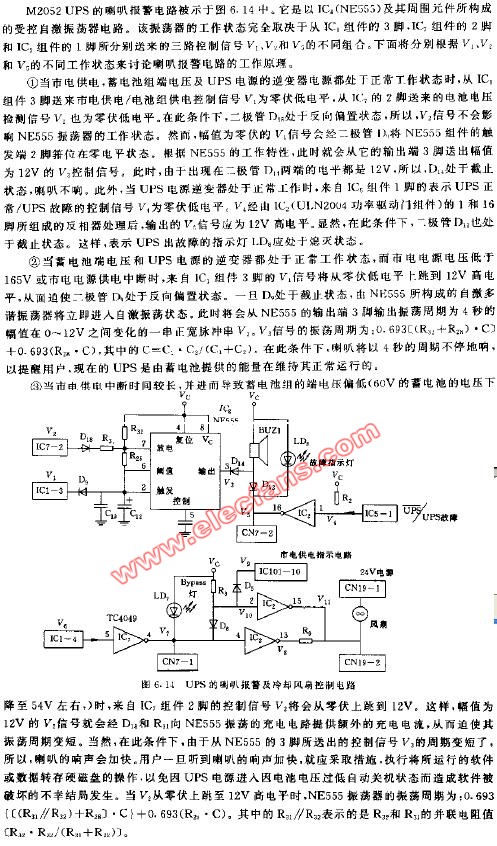
這種IC的例子有兩個,一個是直流驅動,另一個是PWM驅動,如圖1和2所示。圖1中的IC遠程檢測溫度并根據溫度控制風扇速度。該芯片通過一個內部功率晶體管產生一個直流電源電壓。圖2中的IC具有類似功能,但通過一個外部晶體管以PWM波形來驅動風扇。兩者都具備完整的熱故障監測和過熱輸出,如果高速芯片太熱可用來關斷系統。

圖1. 線性(直流輸出)溫度傳感器和自動風扇速度控制器。根據高速芯片的溫度自動控制風扇速度。風扇的轉速計反饋允許風扇控制器直接調節風扇速度。系統關斷輸出防止高速芯片到達毀滅性溫度。

圖2. PWM輸出的溫度傳感器和自動風扇速度控制器。根據溫度來自動控制風扇速度。時鐘節流和系統關斷輸出防止高速芯片達到毀滅性溫度。將CRIT0和CRIT1管腳連接到電源或地可選擇默認的關斷溫度門限,即使系統軟件掛起時也能確保安全。
高速芯片通常會逐漸變熱。它們跑得越快就會越熱。新一代的高速數字芯片使用了更小尺寸的工藝,允許降低電源電壓,這會有一些幫助,但是晶體管數量的增加比電源電壓的降低要快,因此功率水平仍然在上升。
當晶片溫度上升時,性能會受到影響。參數改變、最大工作頻率降低,而且定時超出規定。從用戶的角度來看,發生這些情況時,產品不再正常工作。因此,冷卻高速芯片的首要原因就是在盡可能長的工作時間和最寬的環境條件范圍內保持良好的性能。滿足參數規范的條件下,高速芯片的最大允許溫度取決于工藝和芯片的設計方法(芯片工作在何種“接近邊緣”的程度),以及其他一些因素。晶片典型的最大溫度范圍是+90°C至+130°C。
超出性能開始惡化的臨界點工作時,過高的晶片溫度會給晶片造成災難性的損害。最大晶片溫度通常遠高于+120°C,并且由諸如工藝、封裝和處于高溫條件的時間等因素而定。因此,高速芯片需要被冷卻以免達到性能惡化和導致永久性損壞的溫度。
高速芯片很少使用單一的冷卻技術。實際上,一般需要結合多種技術以確保高性能和持續可靠性。散熱片、熱管、風扇和時鐘節流是高速芯片最常用的冷卻手段。最后兩個,風扇和時鐘節流,能夠幫助解決熱問題,但它們會引入自身的問題。
風扇能大幅度地降低高速芯片的溫度,但它們也能產生大量的音頻噪聲。全速運轉的冷卻風扇的噪聲會令很多消費者厭煩,也正成為政府機構所關心的問題,即工作場所中為時已久的噪聲效應。根據溫度來調節風扇速度能明顯地降低風扇噪聲;當溫度低時,風扇可緩慢運轉(可非常安靜),當溫度上升時,則加速運轉。
時鐘節流—降低時鐘速度來減少功耗—通過降低系統性能來發揮作用。當時鐘被節流時,系統繼續工作,但是在降低的速度下工作。很明顯,在高性能系統中,只有在絕對需要時,即溫度達到將停止工作時刻時,才能實行節流。
基于溫度控制風扇速度或時鐘節流需要首先測量高速芯片的溫度。這可通過靠近目標芯片——直接相鄰或有時在下面、或在散熱片上放置一個溫度傳感器來實現。這種方式測量出的溫度與高速芯片的溫度相對應,但明顯偏低(相差多達30°C),并且測量溫度和晶片溫度之間的差異會隨著功耗的增加而增大。因此,電路板或散熱片的溫度必須與高速芯片的溫度相關起來。
對于許多高速芯片,有更好的解決方案。許多CPU、圖像芯片、FPGA和其它高速IC包含了一個“熱二極管”,實際上是連接為二極管的雙極型晶體管,位于晶片上。將遠程二極管溫度傳感器與此熱二極管相連,能夠直接測出極其精確的高速芯片溫度。這不僅繞開了在IC封裝外測量溫度時所遇到的大溫度梯度問題,而且還消除了很長的熱時間常數問題,從幾秒到幾分鐘,提高了對于晶片溫度變化的響應速度。
對于風扇控制的需求迫使設計者做出幾個關鍵選擇。第一個選擇是調節風扇速度的方法。調節無刷直流風扇速度的常用方法是調整風扇的電源電壓。這種方法可在電源電壓最低到額定值的40%時很好地工作。但有一個缺點。如果使用線性調節器件來改變電源電壓的話,則效率很低。使用開關電源可以獲得更好的效率,但會增加成本和元件數量。
另外一個流行的風扇速度控制技術是用一個低頻PWM信號驅動風扇,一般在30Hz范圍內,通過調整該信號的占空比來調節風扇速度。因為只用單個小開關管,因而這種方案的成本低廉。由于晶體管作為開關使用,所以效率很高。可是,該法的不足之處就是風扇會多少有些噪聲,這是由脈沖方式的電源引起的。PWM波形的快速邊沿會引起風扇的機械結構移動(有點像設計很差的揚聲器),因而產生聽得見的噪聲。
另外一個風扇控制的設計選擇是是否測量風扇速度,以便作為控制策略的一部分。除了電源和地,許多風扇都有第三根線,該線向風扇控制電路提供“轉速計”信號。轉速計輸出在風扇每旋轉一圈時產生特定數量的脈沖(例如兩個脈沖)。一些風扇控制電路將這種轉速計信號作為反饋,調節風扇電壓或PWM占空比以獲得期望的RPM。更簡單的方法是忽略任何轉速計信號,只調節風扇驅動加速或減速。該方案的速度控制精度較小,但成本更低,并且至少省卻了一個反饋環,簡化了控制系統。
在一些系統中,限制風扇速度的變化速率也很重要。當系統與用戶非常接近時,這一點尤其重要。有些情況下簡單地開關風扇或當溫度變化時立即改變速度是可接受的。可是,當用戶就在附近時,風扇噪聲的突然變化會格外顯著且令人討厭。將風扇驅動信號的變化率限制在一定限度以內(如1%每秒)會最大限度降低風扇控制的聽覺效果。風扇速度同樣改變了,但不會特別引人注意。
另外一個重要的設計因素是風扇控制策略。通常情況下,風扇在特定的溫度門限以下關閉,當超過門限后開始低速旋轉(例如全速度的40%)。當溫度上升時,風扇驅動隨溫度線性增長,直至100%的驅動。最佳斜率依賴于系統要求。更大的斜率一定程度上可獲得更穩定的芯片溫度,但當功耗隨時變化時,風扇速度的變化量更大。如果目標是高性能,則應該選擇起始溫度和斜率,以使風扇在晶片溫度高到足以啟動時鐘節流之前達到全速運轉。
風扇控制電路可以多種方式實現。具有多達5個測量通道的多種遠端溫度傳感器可直接檢測高速芯片的溫度,并將溫度數據傳送給微處理器。具有多個風扇轉速計監視通道的風扇速度調節器可對風扇RPM或電源電壓提供可靠的控制,并可接受來自于外部微控制器的命令。為了降低成本和簡化設計,單片封裝內包含了溫度測量和自動風扇控制的IC已有市售。傳感器/控制器一般也包含了過溫檢測,可用于時鐘節流或系統關斷,因而可避免高速芯片因過熱而災難性損毀。
這種IC的例子有兩個,一個是直流驅動,另一個是PWM驅動,如圖1和2所示。圖1中的IC遠程檢測溫度并根據溫度控制風扇速度。該芯片通過一個內部功率晶體管產生一個直流電源電壓。圖2中的IC具有類似功能,但通過一個外部晶體管以PWM波形來驅動風扇。兩者都具備完整的熱故障監測和過熱輸出,如果高速芯片太熱可用來關斷系統。
圖1. 線性(直流輸出)溫度傳感器和自動風扇速度控制器。根據高速芯片的溫度自動控制風扇速度。風扇的轉速計反饋允許風扇控制器直接調節風扇速度。系統關斷輸出防止高速芯片到達毀滅性溫度。
圖2. PWM輸出的溫度傳感器和自動風扇速度控制器。根據溫度來自動控制風扇速度。時鐘節流和系統關斷輸出防止高速芯片達到毀滅性溫度。將CRIT0和CRIT1管腳連接到電源或地可選擇默認的關斷溫度門限,即使系統軟件掛起時也能確保安全。











 工商網監
工商網監
評論