 電子發燒友App
電子發燒友App


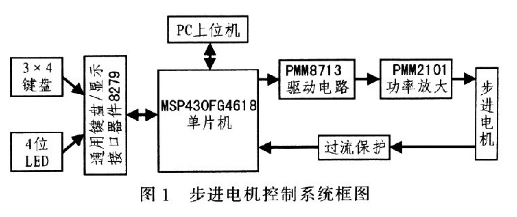
步進電動機是純粹的數字控制電動機,它將電脈沖信號轉變成角位移,即給一個脈沖,步進電機就轉一個角度,因此非常適合單片機控制。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,電機則轉過一個步距角,同時步進電機只有周期性的誤差而無累積誤差,精度高。
??? 步進電動機有如下特點:
??? ①步進電動機的角位移與輸入脈沖數嚴格成正比。因此,當它轉一圈后,沒有累計誤差,具有良好的跟隨性。
??? ②由步進電動機與驅動電路組成的開環數控系統,既簡單、廉價,叉非常可靠。同時,它也可以與角度反饋環節組成高性能的閉環數控系統。
??? ③步進電動機的動態響應快,易于啟停、正反轉及變速。
??? ④速度可在相當寬的范圍內平穩調整,低速下仍能獲得較大轉矩,因此一般可以不用減速器而直接驅動負載。
??? ⑤步進電機只能通過脈沖電源供電才能運行,不能直接使用交流電源和直流電源。
??? ⑥步進電機存在振蕩和失步現象,必須對控制系統和機械負載采取相應措施。
??
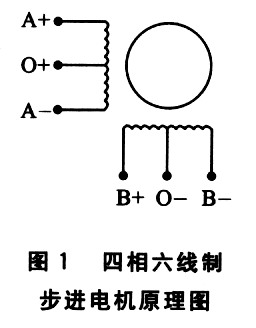
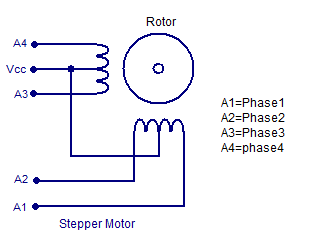
??? 步進電機具有控制和機械結構簡單的優點。圖1是四相六線制步進電機原理圖,這類步進電機既可作為四相電機使用,也可做為兩相電機使用,使用靈活,因此應用廣泛。
???? 
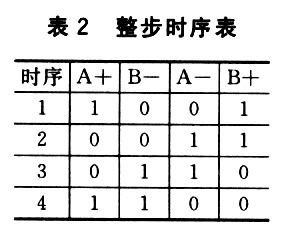
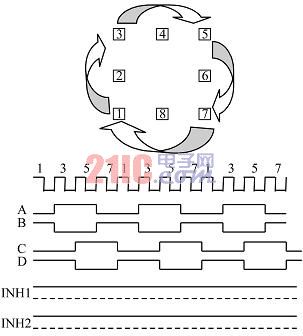
??? 步進電機有兩種工作方式:整步方式和半步方式。以步進角1.8°四相混合式步進電機為例,在整步方式下,步進電機每接收一個脈沖,旋轉1.8°,旋轉一周,則需要2OO個脈沖。在半步方式下,步進電機每接收一個脈沖,旋轉0.9°,旋轉一周,則需要4OO個脈沖。控制步進電機旋轉必須按一定時序對步進電機引線輸入脈沖。以上述四相六線制電進電機為例,其半步工作方式和整步工作方式的控制時序如表1和表2所列。
???? 
??? 
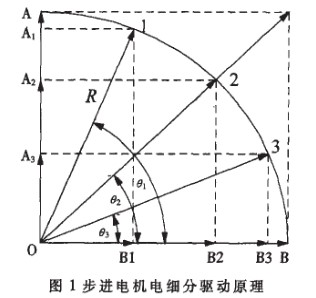
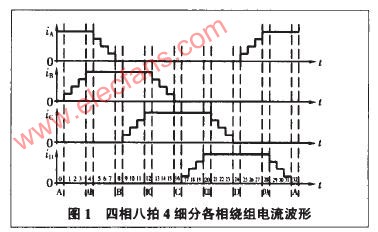
??? 步進電機在低頻工作時.會有振動大、噪聲大的缺點。如果使用細分方式,就能很好的解決這個問題。步進電機的細分控制,從本質上講是通過對步進電機勵磁繞組中電流的控制,使步進電機內部的合成磁場為均勻的圓形旋轉磁場,從而實現步進電機步距角的細分。一般情況下,合成磁場矢量的幅值決定了步進電機旋轉力矩的大小,相鄰兩合成磁場矢量之間的夾角大小決定了步距角的大小。步進電機半步工作方式就蘊涵了細分的工作原理。
??
實現細分方式有多種方法,最常用的是脈寬調制式斬波驅動方式,大多數專用的步進電機驅動芯片都采用這種驅動方式,TA8435就是其中一種芯片。
??? 2? 基于TA8435H芯片的步進電機細分方式
??? 2.1?? TA8435芯片特點
??? TA8435是東芝公司生產的單片正弦細分二相步進電機驅動專用芯片,該芯片具有以下特點:
??? ①工作電壓范圍寬(10~40 v);
??? ②輸出電流可達1.5 A(平均)和2.5 A(峰值));
??? ③具有整步、半步、1/4細分、1/8細分運行方式可供選擇;
??? ④采用脈寬調制式斬波驅動方式;
??? ⑤具有正/反轉控制功能;
??? ⑥帶有復位和使能引腳;
??? ⑦可選擇使用單時鐘輸入或雙時鐘輸入。
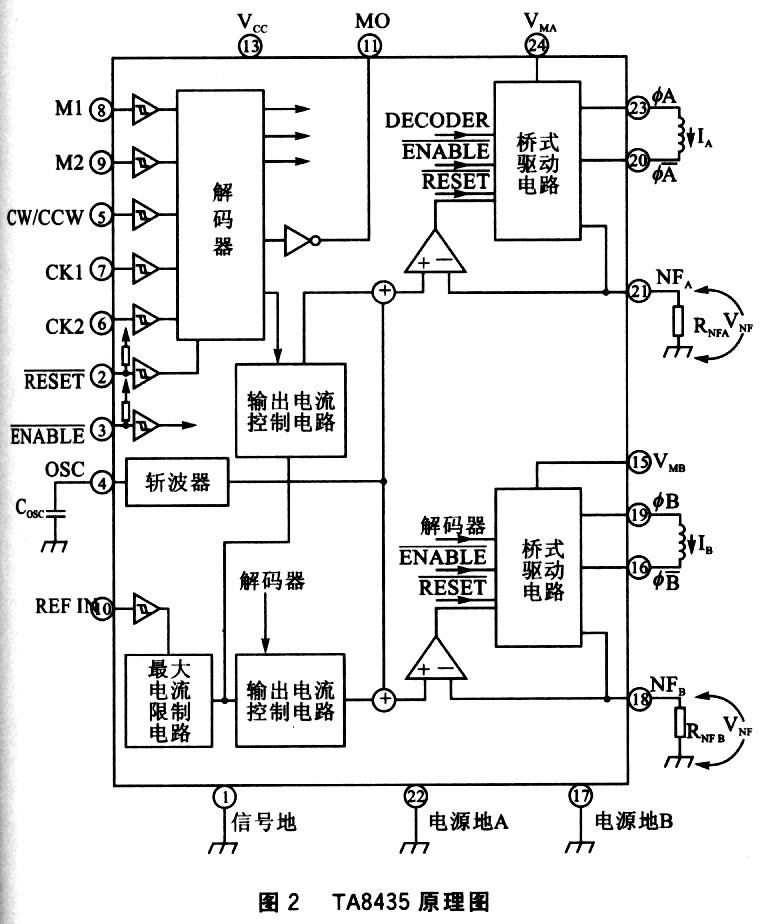
??? 從圖2中可以看出,TA8435主要由1個解碼器、2個橋式驅動電路、2個輸出電流控制電路、2個最大電流限制電路、1個斬波器等功能模塊組成。
???? 
??? 2.2 TA8435細分工作原理
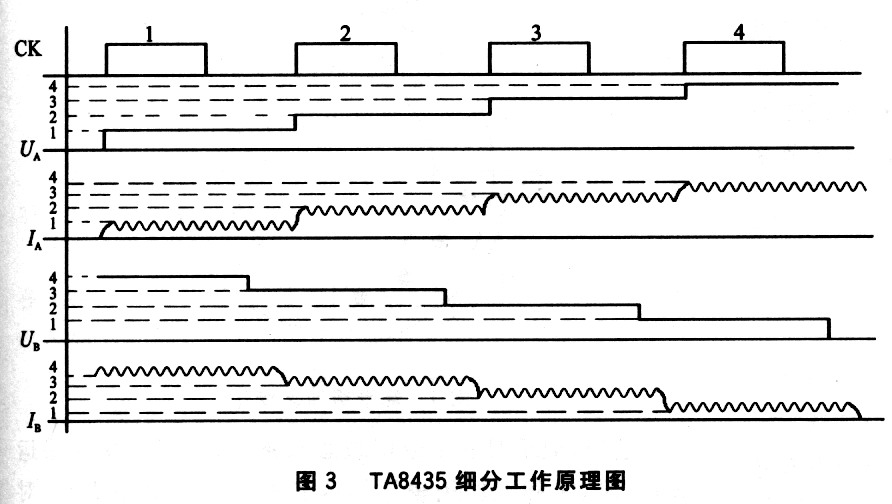
??? 在圖3中,第一個CK時鐘周期時,解碼器打開橋式驅動電路,電流從VMA流經電機的線圈后經RNFA后與地構成回路,由于線圈電感的作用,電流是逐漸增大的,所以RNFB上的電壓也隨之上升。當RNFB上的電壓大于比較器正端的電壓時,比較器使橋式驅動電路關閉,電機線圈上的電流開始衰減,RNFB上的電壓也相應減小;當電壓值小于比較器正向電壓時,橋式驅動電路又重新導通,如此循環,電流不斷的上升和下降形成鋸齒波,其波形如圖3中IA波形的第1段。另外由于斬波器頻率很高,一般在幾十kHz,其頻率大小與所選用電容有關。在OSC作用下.電流鋸齒波紋是非常小的,可以近似認為輸出電流是直流。在第2個時鐘周期開始時,輸出電流控制電路輸出電壓Ua達到第2階段,比較器正向電壓也相應為第2階段的電壓,因此,流經步進電機線圈的電流從第l階段也升至第二階段2。電流波形如圖IA第2部分。第3時鐘周期,第4時鐘周期TA8435的工作原理與第1、2是一樣的,只是又升高比較器正向電壓而已,輸出電流波形如圖IA中第3、4部分。如此最終形成階梯電流,加在線圈B上的電流,如圖3中IB。在CK一個時鐘周期內,流經線圈A和線圈B的電流共同作用下,步進電機運轉一個細分步。
???? 
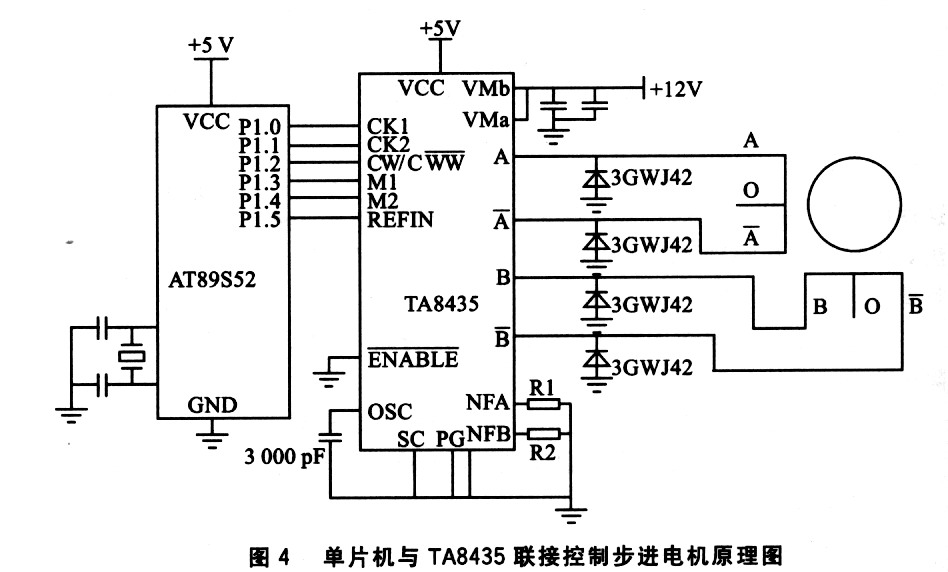
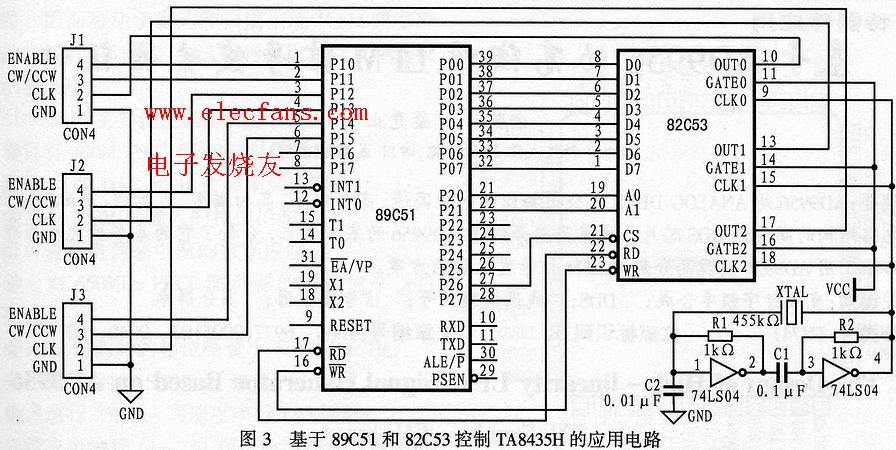
??? 2.3步進電機的應用
??? 圖4是單片機與TA8435相連控制步進電機的原理圖。引腳M1和M2決定電機的轉動方式:MI=0、M2=O,電機按整步方式運轉;Ml=1、M2=0,電機按半步方式運轉;M1=O、M2=1,電機按1/4細分方式運轉;Ml=1、M2=1,電機按l/8步細分方式運轉。CW/CWW控制電機轉動方向,CKl、CK2時鐘輸入的最大頻率不能超過5 kHz。控制時鐘的頻率,即可控制電機轉動速率。REFIN為高電平時,NFA和NFB的輸出電壓為0.8 V,REFIN為低電平時,NFA和NFB輸出電壓為0.5 V,這2個引腳控制步進電機輸入電流,電流大小與NF端外接電阻關系式為:,Io=Vref/Rnf。圖4中,設REFIN=l,選用步進電機額定電流為0.4 A,Rl、R2選用1.6 Ω、2W的大功率電阻,O、C兩線不接。步進電機按二相雙極性使用,四相按二相使用時可以提高步進電機的輸出轉矩。D1~D4快恢復二極管用來泄放繞組電流。
???? 
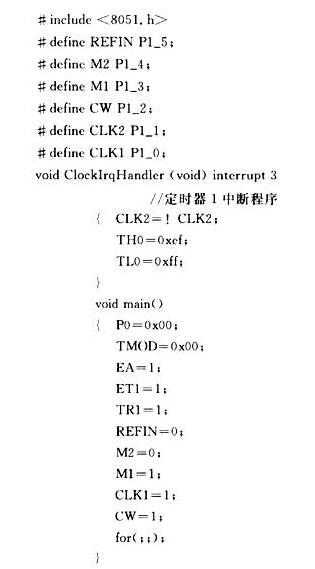
??? 以下是利用TA8435控制步進電機的程序,實現采用l/8細分方式控制步進電機順時針方向轉動的功能。利用定時器1向TA8435輸出脈沖,用來控制步進電機轉速。
??? #include<8051.h>
??? #define REFIN P1_5;
??? #define M2 Pl_4}
??? #define-M1 Pl_3;
??? #defineCW Pl_2;
??? #define CLK2 Pl_1;
??? #deflne CLKl P1_O;
??? void C10cklrqHandler(void)interrtlDt 3
??? //定時器1中斷程序
??? {CLK2=!CLK2;
??? TH0=0xef;
??? TL0=0xff;
?
??? void main()
??? {? PO=0x00;
???? TMOD=0x00;
??? EA=l:
??? ETl=h
??? TRl=1:
??? REFlN=0;
??? M2=O:
??? M1=1:
??? CLKl=l:
??? CW=l.
??? for(;;);
??? }
??? 3? 結? 論
??? 本文介紹了步進電機的特點和TA8435芯片工作原理。使用細分方式可以提高步進電機的控制精度,降低步進電機的振動和噪聲。因此,在低頻工作時,可以選用1/4細分或1/8細分模式,以降低系統的振動和噪聲。當系統需要在高速工作時,細分模式就有可能達不到要求的速度,這時可以選用整步或半步方式。在速度較高時,在整步或半步工作模式下,步進電機運行穩定,振動小,噪聲也小。TA8435在細分、半步、整步幾種工作模式之間的切換是相當容易的。使用TA8435控制步進電機具有價格低、控制簡單、工作可靠的特點,所以具有很高的推廣價值和廣闊的應用前景。










 工商網監
工商網監
評論