 電子發燒友App
電子發燒友App


0 引言
輪式小車是智能小車機械結構的主體部分,由車身、輪子、速度傳感器、轉動軸等結構部件構成。還包括提供動力的驅動器,采集環境信息的攝像頭等模塊,綜合實現收集小車的自身狀態信息或外部環境信息,并對傳感器的數據進行分析、融合,動態調整小車的運動狀態,實現在一定條件下的自主尋跡行駛。
本智能車采用PID控制算法,使用CCD線型攝像頭作為黑色引導線的檢測設備,經LM393比較后供單片機進行數據采集,圖像識別,從而可以進行路徑識別。電機驅動采用的是PC33886,使用直射型光電傳感器來測量速度,并將相關信息顯示在LCD液晶顯示屏上,并采用4個按鈕按鍵進行參數設定,為現場調試提供了友好的人機交互界面。
1 系統框架設計
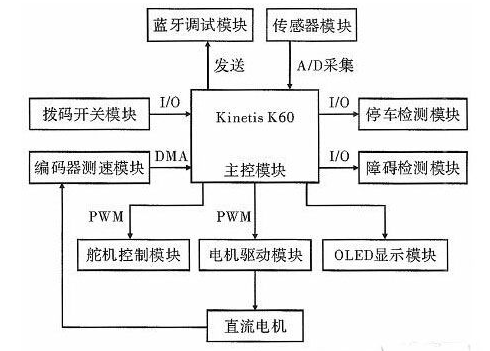
整個車模系統可以分為三大部分:環境圖像采集部分、電機和舵機驅動部分、中央數據處理部分,且采用16位微控器MC9S12DGl28B作為核心控制單元,系統框圖如圖1所示。

智能車的動力部分使用的是常見的小型永磁式直流電機。這種電動機的驅動電路非常成熟,既有分離元件組成的驅動器,也有一體化的功率集成驅動芯片可供選用。
智能汽車最重要的部件,也就是智能汽車的大腦——中央處理系統。它不僅負責將環境圖像采集部分送來的圖像數據進行處理,還要將這些信息轉化成為電機的驅動控制信號,使整車按照預定的規則前行,這就要求該系統具有龐大的數據處理能力。
2 路面檢測模塊
2.1 路面檢測方案比較及可行性分析
環境圖像采集部分可以采用陣列紅外探頭和CCD或CMOS圖像傳感器來實現,前者的特點是價格低廉、電路簡單、應用方便,缺點是性能有限,對復雜環境的適應能力較弱,效果較差。而CCD或COMS圖像傳感器(攝像頭)就能彌補陣列紅外探頭的各種缺點。
為了能快速采集圖像數據并且兼顧開發的難易程度,在此次設計中將采用輸出標準TV視頻信號的黑白監控攝像頭。這種攝像頭可以配合行、場同步信號分離電路和單片機自身的A/D轉換電路,可以將圖像方便地采集進來,從而回避數字型攝像頭復雜的總線協議和數據處理過程。
2.2 硬件設計
LM1881視頻同步信號分離芯片可以從攝像頭信號中提取信號的時序信息,LM1881的同步分離電路如圖2所示。

引腳2為視頻信號輸入端,攝像頭信號即由此輸入LM1881,引腳3為場同步信號輸出端,當攝像頭信號的場同步脈沖到來時,該端將變為低電平,一般維持 230μs,然后重新變回高電平,引腳7為奇一偶場同步信號輸出端,當攝像頭信號處于奇場時,該端為高電平,當處于偶場時,為低電平。奇一偶場的交替處與場同步信號的下降沿同步,也就是和場同步脈沖后的上升沿同步。
3 速度傳感器
3.1 方案選擇
(1)霍爾傳感器配合稀土磁鋼
優點:獲取信息準確、體積小、不增加后輪負載。
缺點:齒輪出靠近主驅動電機,容易受磁場干擾,對齒輪打孔容易順壞齒輪。
(2)光電傳感器
優點:體積小、不增加后輪負載、反射型方案對原有器件不需要再加工。
缺點:精度受到光電管體積的限制。
(3)光電編碼器
優點:獲取信息準確、精度高。
缺點:增加后輪負載、體積大。
比較以上三種方案,考慮到系統的可靠性,主后輪轉動齒輪為塑料質地,打孔比較危險,而且車重的任何增加都有可能影響到車速,最終決定采用直射型光電傳感器。
3.2 硬件電路設計
傳感器電路結構圖如圖3所示。

4 驅動部分
4.1 電機驅動器選擇
根據電機學和電力拖動理論,電機驅動器要有足夠的電流輸出能力來保證驅動力的充足。綜合考慮,電機驅動器采用一體化的專用功率驅動集成電路進行設計分離元件(場效應管)構成的驅動器。
根據電機學,直流電動機轉速,n的表達式為:
式中:U為電樞端電壓;I為電樞電流;R為電樞電路中電阻;φ為每級磁通量;K為電動機結構參數。
由式(1)可知,直流電動機的轉速控制方法可以分為兩大類:對勵磁磁通進行控制的勵磁控制法和對電樞電壓進行控制的電樞控制法。現在大多數應用場合都使用電樞電壓控制法,本設計采用的是在保證勵磁恒定不變的情況下,采用PWM來實現直流電動機的調速方法。
電動機的電樞繞組兩端的電壓平均值U。為:

式中:占空比D表示在一個周期T里開關導通的時間與周期的比值,D的變化范圍為0≤D≤1。由式(2)可知,當電源電壓Us不變的情況下,電樞兩端電壓的平均值Uo取決于占空比D的大小,改變D值也就改變了電樞兩端電壓的平均值,從而達到控制電動機轉速的目的,即實現PWM調制。
為了便于取材和設計方便,此次設計選擇了飛思卡爾半導體公司的PC33886。PC33886在PWM調速模式驅動下可以接受20 kHz的工作頻率;具有過熱、過流、短路保護,并且通過一條反饋線將器件的工作狀態反饋給單片機。
4.2 舵機控制
舵機控制程序流程圖如圖4所示。
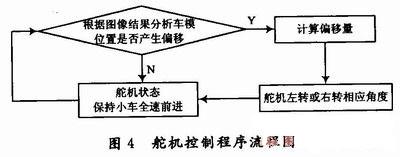
車模在行駛過程中不斷采樣路況信息,并通過分析車模與賽道相對位置判斷車模所處路況,計算轉彎半徑。所有舵機標準PWM周期為20 ms,轉動角度最大為90°,當給舵機輸入脈寬為0.5 ms,即占空比為O.5/20=2.5%的調制波時,舵機右轉90°。可以推導出轉動角度與脈寬的關系計算公式為:
t=1.5±θ/90
式中:t為正脈沖寬度,單位:ms;θ為轉動角度;當左轉時取加法計算,右轉時取減法計算。
在具體操作中PWM調制波的周期可以設置在20 ms左右一定范圍內均可以使舵機正常轉動,經反復測試最終把輸出PWM調制波周期設為13 ms。
運行電機的轉速以及舵機的轉角,在軟件上都是通過對PWM波占空比進行設置來相應控制的。
5 電源模塊
電機驅動系統要求大功率的電源供應:低內阻、大電流、對電源的紋波不敏感;單片機和圖像采集系統對電源質量要求較高:低內阻、波紋小、自身功耗不大,但要嚴防電動機在工作時產生的干擾。供電系統框圖如圖5所示。

由于攝像頭需要一個9~12 V的電壓才能正常工作,而充電電池的電壓只有6~7.2 V。所以DC-DC升壓電路便成為必須。
DC-DC電壓變換采用MC34063A集成電路,該器件內部集成了溫度補償器、比較器、動態電流帶限占空比可控的振蕩器和一個高電流輸出驅動器。輸出電壓直接由兩個外接的誤差為2%的電阻控制。該電路可以方便地應用于升壓和降壓兩種場合,電路原理圖如圖6所示。

6 軟件設計
軟件結構圖如圖7所示。
整個小車自動識別控制過程都是通過主控單片機芯片上的程序控制來完成整個智能控制過程。小車開啟后將自動沿著有一定寬度的黑線軌道行駛,行駛中將連續檢測到的黑線位置信息反饋給主控芯片,通過主控芯片處理后將執行結果反饋給控制器,進而控制小車前行方向,并通過軟件檢測小車速度及按鍵的更改信息最終將結果通過LCD顯示屏顯示。
7 結語
智能車設計涉及控制、模式識別、傳感器技術、汽車電子、電氣、計算機、機械等專業領域。整個設計沒有采用過于復雜的檢測方法或控制算法,而是采用了攝像頭圖像處理技術和經典PID控制算法,這樣不但能保證系統的可靠性、穩定性與快速性,而且節省了成本與工作量。在控制算法上,PID控制保證了系統的快速和穩定;在檢測方法上,攝像頭連續檢測的設計,保證了高速直線行駛的無抖動,以及光電管測速方法的應用,保證了測速系統的簡單可靠。














 工商網監
工商網監
評論