 電子發燒友App
電子發燒友App


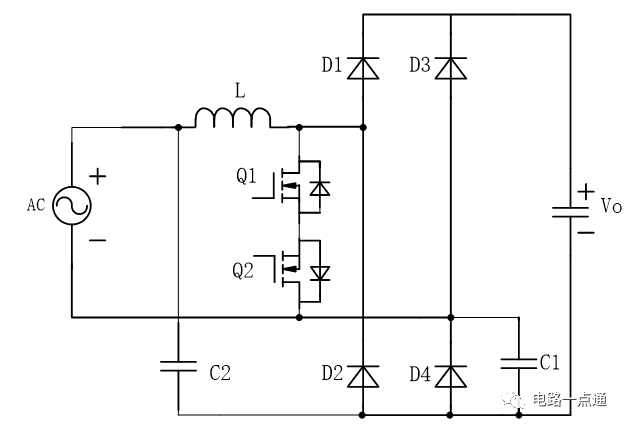
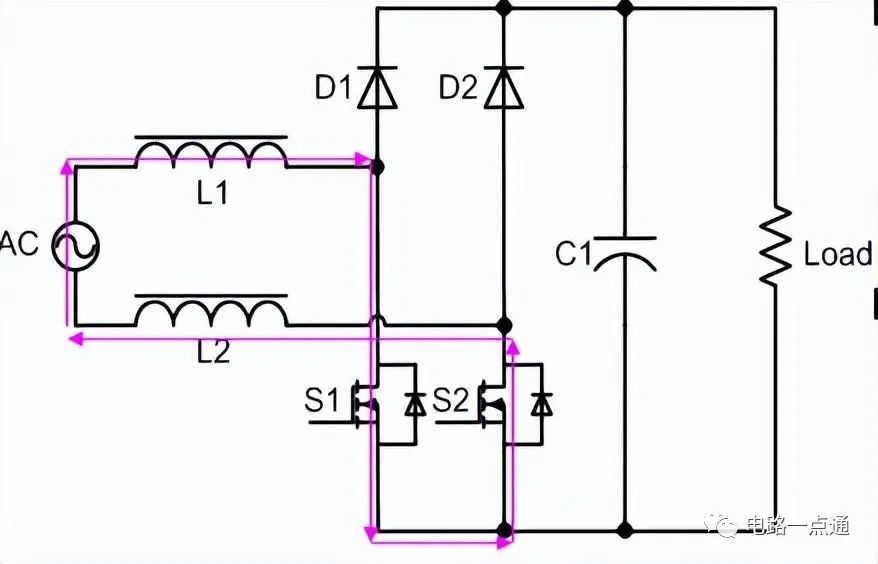
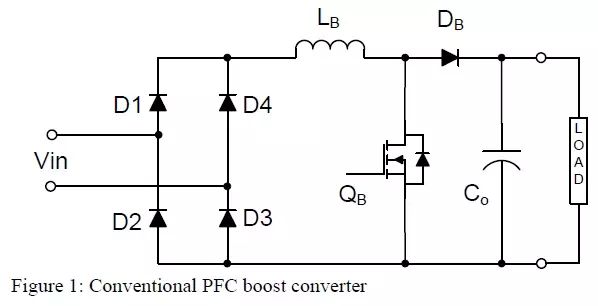
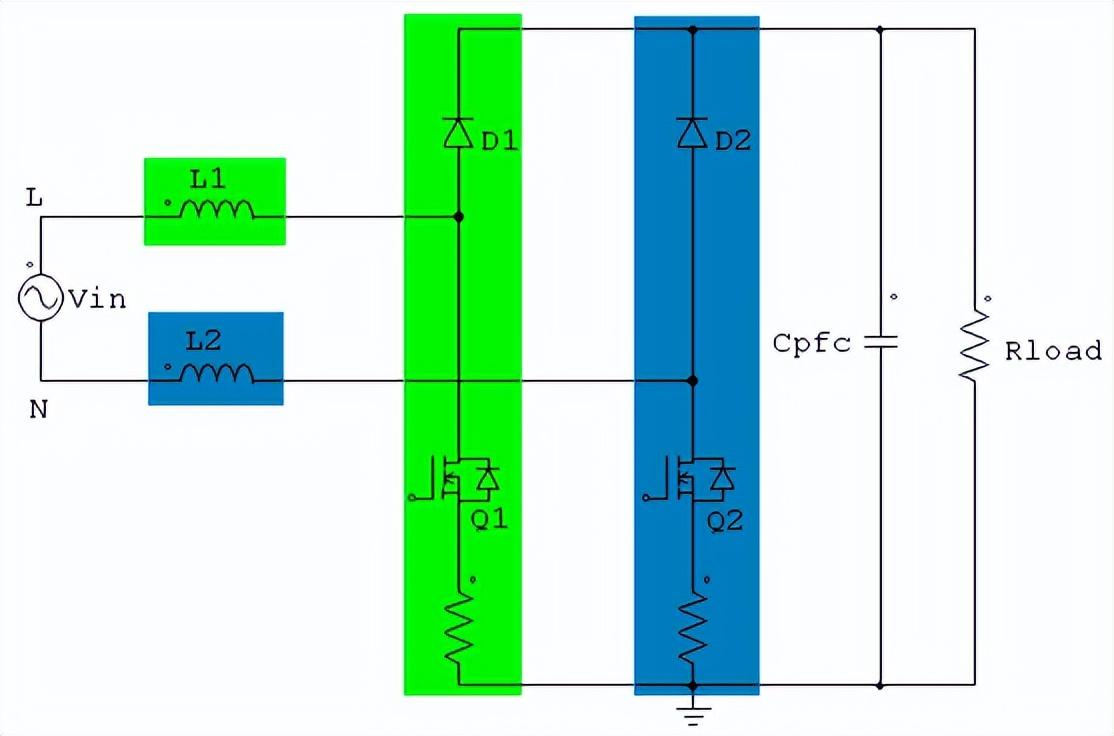
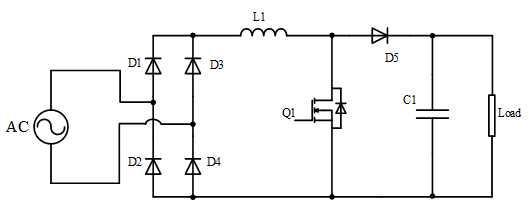
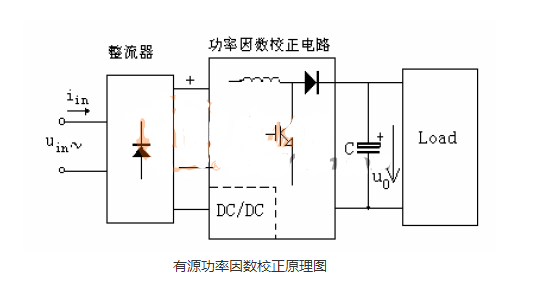
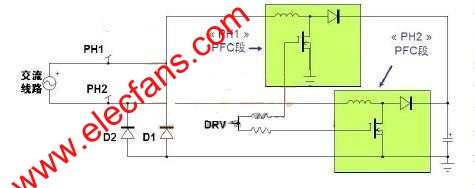
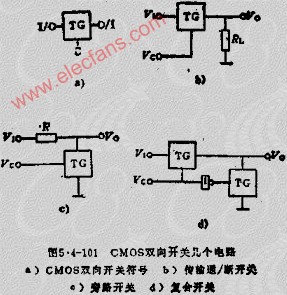
圖1 雙向開關無橋PFC電路拓撲
電路圖說明:
Q1、Q2組成雙向開關,D1、D2為快恢復二極管,D3、D4為慢恢復二極管(通常選擇單個整流橋以簡化設計、優化成本);理論上,D3、D4也可以使用MOS管,并可實現同步整流功能,但需增加相應的驅動電路。
為了消除在輸入電壓過零時刻,慢恢復二極管D3、D4兩端的高頻抖動電壓,增加了C1、C2兩個電容;
Vo為PFC母線電容輸出電壓;
主電路的工作原理
該電路的開關控制器件為Q1與Q2組成的雙向開關。為了驅動電路的簡化,Q1、Q2的驅動方式采用同開同關控制方式。同時由于其S極是浮地的,故其驅動電路需要采用浮地驅動方式。電路中D1、D2為快恢復二極管,D3、D4為慢恢復二極管。
按照目前的器件水平,我們選擇的快恢復二極管,其反向恢復時間大多為幾十ns水平(SiC二極管則在幾ns的水平),而常用的慢恢復二極管在相同的測試條件下,其反向恢復時間大多在幾百ns水平,即慢恢復二極管的反向恢復時間要遠大于快恢復二極管。該電路拓撲也正是利用了D3、D4遠大于D1、D2的反向恢復特性,在交流輸入正負半周時段中可以通過分別保持D3、D4的導通而使該電路拓撲獲得良好的EMC特性。該電路拓撲的具體工作原理描述如下(后續的工作狀態分析中,都假設各器件為理想器件):
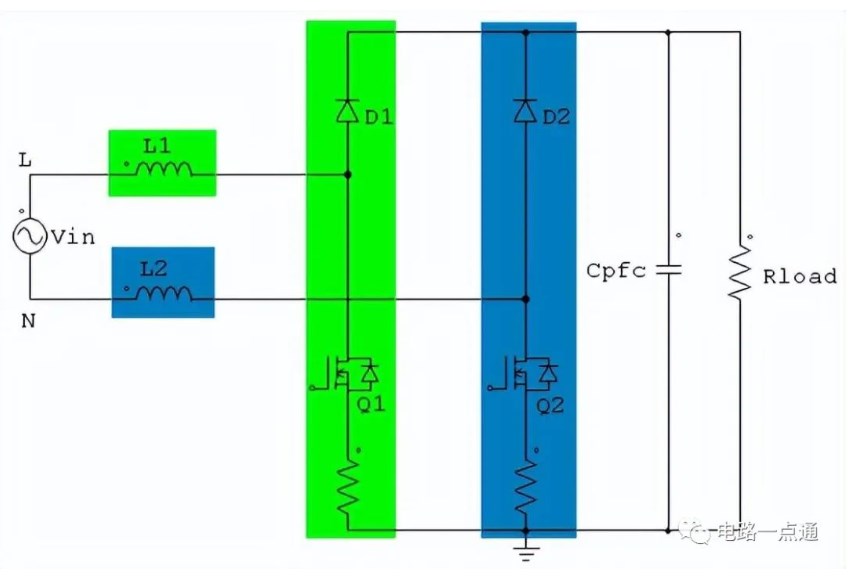
交流輸入為正半周時(具體工作時序電路圖請見圖2,相關波形請見圖4):
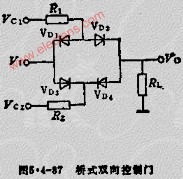
(a)當Q1、Q2開通時,交流輸入經L、Q1、Q2通路給PFC電感L持續充電,電感電流iL線性上升。由于快恢復二極管D1反向恢復的時間要遠小于D4的反向恢復時間,當Q1、Q2開通后,快恢復二極管D1很快反向截止,而D4依然處于反向恢復導通狀態。D1截止后,其兩端電壓迅速上升為母線電壓Uo,從而使D4上反向承受的電壓在Q1、Q2導通期間一直為零(也可以理解D1截止后,其反向恢復通路中反向恢復電流為零,無法繼續抽取D4中存儲的反向恢復電荷,從而一直維持D4的反向導通狀態)。D2由于Q1、Q2、D4的鉗位,其兩端電壓為零。
(b)當Q1、Q2關斷時,Q1、D2體電容充電至母線電壓Uo,二極管D1、D4正向導通,電感電流沿D1、母線電容、D4續流,電感電流iL線性上升。期間,Q2由于體二極管的鉗位,其DS兩端電壓一直為零。
由上可知,在整個正半周區間D4一直處于導通狀態,D3一直處于截止狀態。在交流輸入正半周時刻,Q1實現開關控制,Q2的同開同關可以起到類似同步整流作用。
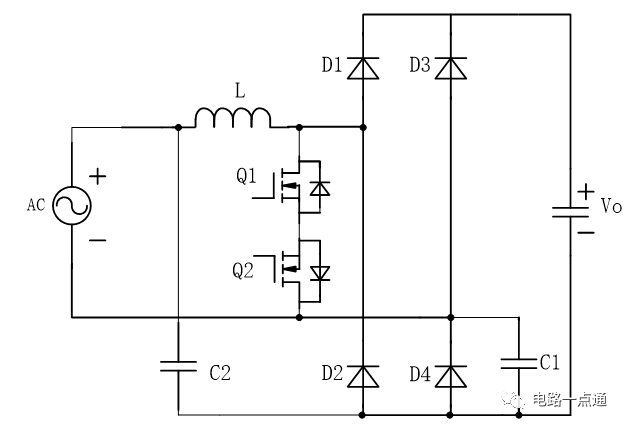
交流輸入為負半周時(具體工作時序電路圖請見圖3,相關波形請見圖5):
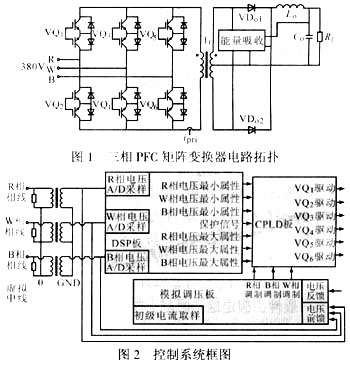
(a)當Q1、Q2開通時,交流輸入通過Q2、Q1、L通路給PFC電感L持續充電,電感電流iL線性上升。與上面的原理相同,由于快恢復二極管D2反向恢復的時間要遠小于D3的反向恢復時間很長,當Q1、Q2開通后,快恢復二極管D2很快反向截止,從而使D3一直處于反向恢復導通狀態。在此期間,D1由于Q1、Q2、D3的鉗位,其兩端電壓為零。
(b)當Q1、Q2關斷時,Q2、D1充電至母線電壓Uo,二極管D3、D2正向導通,電感電流沿D3、母線電容、D2續流。期間,Q1由于體二極管的鉗位,其DS兩端電壓一直為零。
由上可知,在整個正半周區間D3一直處于導通狀態,D4一直處于截止狀態。在交流輸入負半周時刻,則Q2實現開關控制,Q1起到類似同步整流作用。
由上面的分析可知:正是由于D3、D4的反向恢復特性,D4、D3分別在交流輸出正負半周保持導通狀態,即D3、D4兩端電壓為幅值Uo,交流輸入工頻的方波,從而消除了母線正負電壓節點相對于交流輸入L/N的PFC開關頻率的電壓抖動。
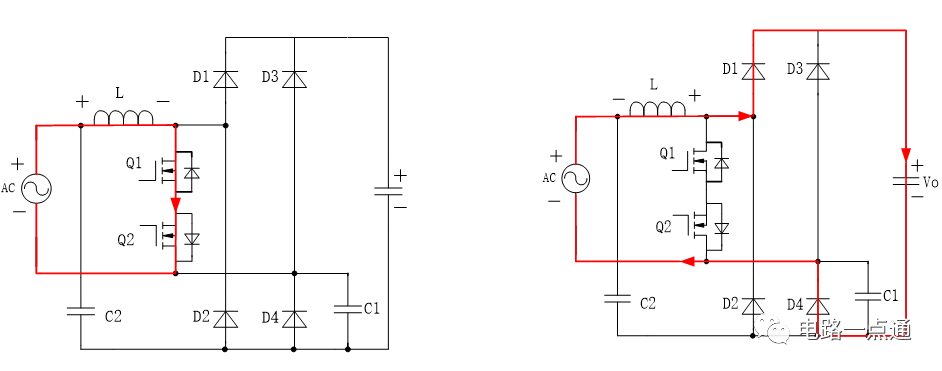
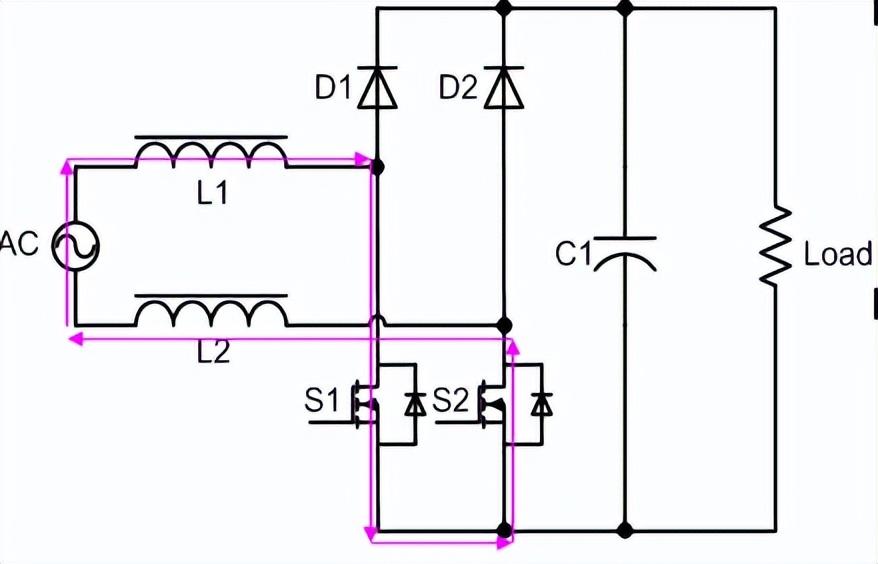
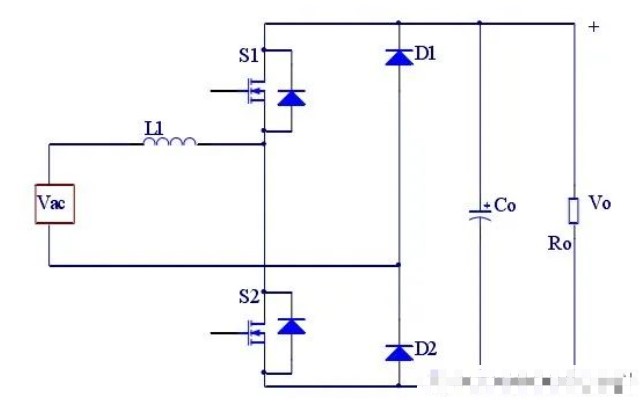
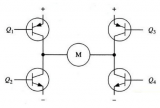
圖2 交流輸入正半周電路工作原理示意圖
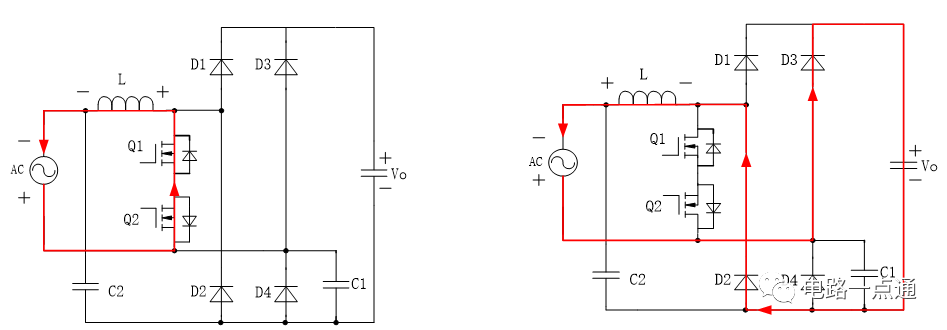
圖3 交流輸入負半周電路工作原理示意圖
總結:
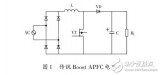
雙向開關無橋PFC電路拓撲屬于無橋PFC電路拓撲結構中的一種,其相對于雙電感無橋PFC電路拓撲減少了一個電感后,依然具有很好的EMC特性。故該電路拓撲在現有的器件水平下可以很好地滿足高效率高功率密度的要求(在現有的無橋拓撲中,該電路拓撲器件數僅多于圖騰柱無橋PFC拓撲)。其不足之處在于:MOS管的驅動需要浮驅電路,同時電流采樣也相對復雜,從而需要增加相應的驅動、采樣及其輔助電源電路的成本。因此該單元電路適合于高效率高功率密度的模塊,對效率要求不高的模塊仍推薦使用傳統有橋Boost PFC電路。
審核編輯:湯梓紅
?













 工商網監
工商網監
評論