 電子發燒友App
電子發燒友App


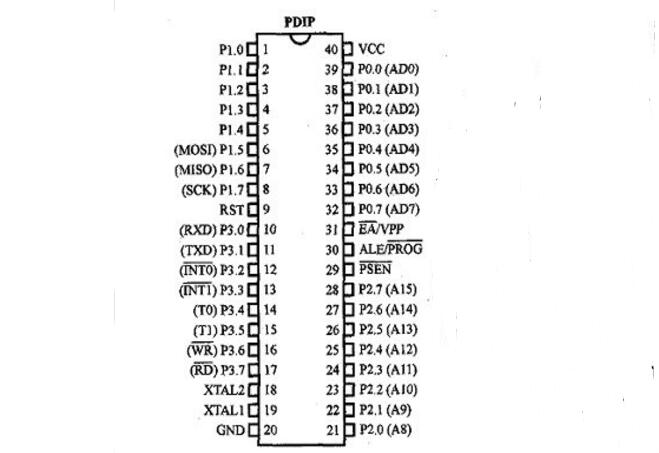
at89c4051應用電路, AT89C4051是一個低電壓,高性能CMOS 8位單片機,片內含4k bytes的可反復擦寫的只讀Flash程序存儲器和128 bytes的隨機存取數據存儲器(RAM),器件采用ATMEL公司的高密度、非易失性存儲技術生產,兼容標準MCS-51指令系統,片內置通用8位中央處理器和Flash存儲單元,功能強大的AT89C4051可為您提供許多高性價比的應用場合。
本文設計了一種基于單片機的模擬角位移傳感器輸出信號的電子裝置,它以單片機為核心,經過D/A轉換和放大電路的處理,最后輸出反應角位移的基準信號和測角信號。
關鍵詞:角位移傳感器 單片機 D/A
在簡易制導武器中,角位移傳感器是姿態修正系統的敏感元件,用來測量彈體的角運動參數并以電信號形式給出三個信息。其中輸出兩路幅值相等相位相差90°的正弦信號作為彈體偏轉測量的基準信號;另一路輸出測角信號,該信號相對基準信號的相位反映角偏差的方向、幅值反映角偏差量。專用信號發生器就是模擬角位移輸出信號的裝置,用來進行后續解調電路以及功放電路的檢測。它以單片機為核心,經過D/A轉換和放大電路的處理,最后輸出反應彈體姿態的基準信號和測角信號。
二 數學模型的建立
根據對輸出信號性能指標的要求,基準信號幅值:A, 基準信號頻率:f ,假設對A的精度要求為±0.01V,對f的要求為±10Hz,輸出信號為正弦信號,可以建立模擬基準信號的數學表達式如下:

其中幅值的大小可以通過放大電路部分進行調節。
測角信號實時反映彈體的姿態,根據檢測需要和角位移傳感器的結構可以建立這一特定的Uc數學表達式為:
其中幅值的大小可以通過放大電路進行調節,相角Ψ反映偏差的方向。
三 方案設計
信號發生器的設計任務就是產生 三路信號,并且提供和主機通訊的軟硬件接口。首先根據輸出信號的頻率和幅值進行編碼,存儲在單片機的ROM里,然后以一定的時間間隔依次將這些數字量送往 D/A進行轉換輸出,這樣,只要循環不已的送數,在D/A的雙極性輸出端就可以得到信號波形。信號的輸出時序受上位機控制。
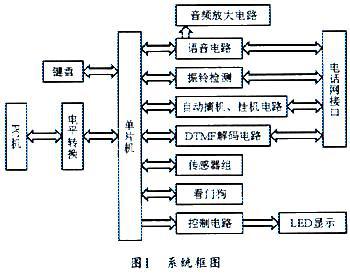
本設計采用AT89C4051組成一個最小的單片機系統。AT89C4051是Atmel公司的一款基于MSC51 內核的簡化單片機,指令與標準的51單片機兼容,帶有4K可重新編程片上程序存儲器,128B的數據存儲器,多達15條可編程I/O線,兩個16位定時器 /計數器,片上模擬比較器,一個標準串行通訊口,內部帶有振蕩器和時鐘電路。系統的硬件結構圖如圖1。
圖1 硬件結構圖
3.1 時鐘復位電路設計
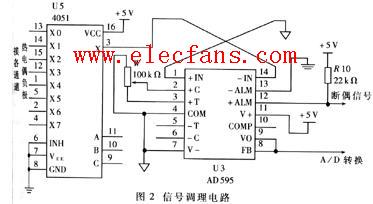
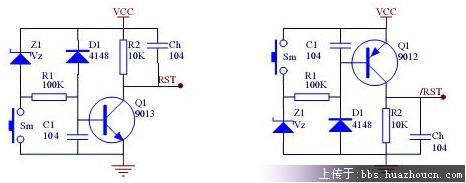
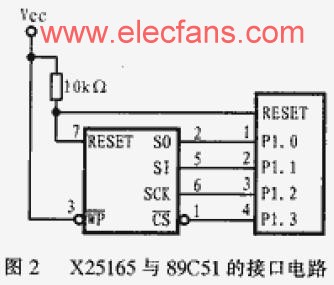
采用單片機片內的振蕩器、上電復位和外部硬件看門狗電路。看門狗采用MAXIM公司的MAX706芯片,硬件電路如圖2。 MAX706可以提供至少200ms寬度的復位脈沖,為使看門狗溢出有效必須把MAX706的WDO和MR連接起來,看門狗輸入WDI連接4051的任何一個I/O端口都可。MAX706在程序運行期間監控整個系統的運行,喂狗程序必須在1.6秒之內使WDI引腳電平發生改變,否則MAX706將發出復位指令,使整個系統復位,看門狗時序如圖3所示。
圖2 復位電路 圖3 看門狗時序圖
3.2 單片機與D/A的接口電路設計
D/A選用AD公司的AD7226。AD7226是具有8位精度的四通道D/A轉換器,最小分辨電壓約為4mV,可以滿足設計的精度要求。每個通道都有一個輸入鎖存器,可以對輸入的數字量進行鎖存;輸出端帶有輸出緩沖放大器。AD7226有一條寫入控制線WR,兩條地址線A0、A1,通過地址線可以選擇不同的D/A轉換通道。寫入時序如圖4所示。
圖4 AD7226寫入時序
由于4051沒有專門的地址和讀寫控制引腳,此處可以通過普通的I/O引腳參考AD7226的寫入時序,利用軟件進行時序模擬。可以通過改變延時的時間來改變輸出的頻率。圖5是利用4051的P3.0、P3.1口作為A0、A1的地址線,P3.5作為WR的寫入控制線的硬件參考電路,相應的示例程序如下:
……..
MOV P1, A ;P1口置數
MOV P3, #0FCH ;選擇通道A
CLR P3.5 ;置P3.5 低電平
SETB P3.5 ;置P3.5 高電平,上升沿鎖存數據
LCALL DELAY ;調用延時子程序
……
圖5 單片機與D/A接口電路
3.3 偏移電路設計
AD7226的每一個通道都可以單獨用來提供單極性或雙極性的輸出,要獲得雙極性的輸出必須外加運算放大器和偏移電阻,輸出電壓的范圍取決于參考電壓的大小,如圖6是在單極性電源供電情況下的雙極性輸出電路圖,要注意偏移電阻的阻值匹配。
圖6 AD7226雙極性輸出電路
3.4 放大電路設計
放大電路主要是對AD7226輸出的雙極性電壓信號幅值進行處理,以達到使用的要求。放大電路的輸入極增加一個一階低通濾波器,以防止D/A輸出的高頻成分干擾;采用低頻運放作為射隨器以提高輸入阻抗。放大電路部分如圖7所示。
圖 7 放大電路(部分)
四 信號發生器的軟件設計
4.1 信號編碼
以產生 為例,來說明如何對信號進行編碼。
AD7226的每一個通道都能單獨的配置成雙極性輸出,參考圖6,以7226的通道A為例, 可以得到輸出表達式:
如果取R1=R2,則有:
其中DA=DBIN /256,其分子部DBIN就是鎖存器A中鎖存的數字量,也就是偏移二進制碼。
由于D/A輸出雙極性電壓的范圍是-VREF ~VREF(127/128),所以要把Uj1放大VREF倍,即對VREFUj1進行編碼,然后通過放大電路處理,得到最終需要的Uj1。這樣就有:
這里要注意 的取值范圍是-1~ ,而不是-1~+1。取整時要按照四舍五入的原則以減少誤差,表1是雙極性輸出時二進制編碼表以及對應模擬輸出電壓。
表 1 雙極性輸出偏移二進制碼表
4.2 軟件設計
軟件的任務是根據上位機的指令完成信號的控制和輸出,編程語言采用8051匯編語言,整個程序由初始化模塊、基準信號輸出模塊、測角及基準信號輸出模塊、中斷模塊、延時模塊和喂狗模塊組成。軟件流程如圖8所示。
4.3 與上位機接口時序
信號發生器采用中斷的模式響應上位機的控制指令,其指令的時序如圖9所示。
系統上電后,上位機須發送清零指令,復位INT0、INT1為低電平,Uj1、Uj2、Uc輸出為0。在INT0、INT1為低電平期間,可以發送基準信號輸出指令INT0,輸出基準信號Uj1、Uj2;在基準信號輸出期間,即INT0為高電平期間,可以發送測角信號輸出指令INT1,此時輸出測角信號 Uc,Uj1、Uj2同步輸出。當INT0變為低電平時,無論INT1為何種狀態,三路信號輸出都為0。發送基準信號和測角信號輸出前必須保證INT0、 INT1有效復位低電平。在INT0為低電平期間,陀螺儀模擬器不響應任何INT1指令。如果發生不可預料的邏輯紊亂,可以通過復位INT0、INT1,再按照圖9所示時序關系發送指令。
圖 8 軟件流程圖
圖 9 INT0、INT1工作時序
五 結 論
通過軟件硬件的調試和檢測,表明該模擬裝置的硬件和軟件系統能很好的工作,在系統的聯調中能正確的模擬角位移傳感器的基準信號和測角信號,滿足設計的要求,已經在某產品的檢測系統中獲得了應用。
AT89C4051雖然是一個功能強大的單片機,但它只有20個引腳,15個外部雙向輸入/輸出(I/O)端口,其中P1是一個完整的8位雙向I/O口,同時內含兩個外中斷口,兩個16位可編程定時計數器,兩個全雙向串行通信口,一個模擬比較放大器(P1.0,P1.1為同相或反箱輸入端),片內時鐘電路。
同時AT89C4051的時鐘頻率可以為零,即具備可用軟件設置的睡眠省電功能,系統的喚醒方式有RAM、定時/計數器、串行口和外中斷口,系統喚醒后即進入繼續工作狀態。省電模式中,片內RAM將被凍結,時鐘停止振蕩,所有功能停止工作,直至系統被硬件復位方可繼續運行。














 工商網監
工商網監
評論