 電子發(fā)燒友App
電子發(fā)燒友App


摘要:本應(yīng)用筆記介紹怎樣使用MAX1233/MAX1234觸摸屏控制器的功能。所提供的簡化控制臺菜單系統(tǒng)支持對MAX1233/MAX1234器件寄存器的底層直接訪問。每一寄存器在32個(gè)SPI™時(shí)鐘周期內(nèi)完成讀寫操作。軟件對每一寄存器使用簡短的助記名。使用MAX1234評估板(EV Kit)和MINIQUSB+命令模塊時(shí),軟件支持最大底層控制。在隨附的zip文件中,提供所有源代碼。
MAX1233的工作方式和
注意:符號"/" (例如,/CS)表示CS、PENIRQ、KEYIRQ和BUSY引腳為低電平有效。
內(nèi)容目錄
MAX1233/MAX1234觸摸屏控制器入門
1.1) 需要的硬件
1.2) MINIQUSB+固件更新說明
1.3) 設(shè)置
1.4) 步驟
1.5) 解釋SPI data in實(shí)例格式
2) 模擬I/O實(shí)例
2.1) 控制DAC輸出電壓
2.2) 選擇ADC基準(zhǔn)電源模式
2.3) 測量外部電壓輸入AUX1和AUX2
2.4) 將AUX1和AUX2轉(zhuǎn)換結(jié)果譯為物理值
2.5) 測量外部電壓輸入BAT1和BAT2
2.6) 將BAT1和BAT2轉(zhuǎn)換結(jié)果譯為物理值
2.7) 測量內(nèi)部溫度TEMP1和TEMP2
2.8) 將TEMP1轉(zhuǎn)換結(jié)果譯為物理值
2.9) 將TEMP1和TEMP2轉(zhuǎn)換結(jié)果譯為物理值
2.10) 測量外部電壓輸入AUX1、AUX2、BAT1、BAT2和溫度
3) 觸摸屏實(shí)例
3.1) 低成本商用觸摸屏
3.2) 連接觸摸屏和評估板
3.3) 驗(yàn)證觸摸屏的連接
3.4) 檢測觸摸屏操作:根據(jù)需要掃描
3.5) 檢測觸摸屏操作:自動(dòng)掃描
4) 鍵盤和通用輸入/輸出引腳
4.1) 配置鍵盤和GPIO引腳
4.2) 讀寫GPIO引腳
4.3) 檢測按鍵:自動(dòng)掃描
4.4) 從鍵盤中屏蔽單個(gè)按鍵
4.5) 從鍵盤中屏蔽一列
5) 管理功耗
6) 菜單系統(tǒng)
6.1) 寄存器讀/寫命令
6.2) 中斷和狀態(tài)引腳命令
6.3) 加入到更新后的MINIQUSB+固件中的命令
7) 結(jié)論
1.1) 需要的硬件
- Maxim MAX1234評估板 (MAX1234EVKIT)
- Maxim MINIQUSB+ (包括USB A-B電纜和MINIQUSB-X+擴(kuò)展板)
- Windows® 2000/XP PC,支持USB。
- 四線阻性觸摸屏(例如,PDA數(shù)字轉(zhuǎn)換器/玻璃屏等)
- 可選:測量DAC輸出電壓的DMM
- 可選:驅(qū)動(dòng)AUX和BAT輸入的電壓源
- 可選:示波器,用于觀察/PENIRQ和/KEYIRQ引腳上的自動(dòng)掃描中斷脈沖。
1.2) MINIQUSB+固件更新說明
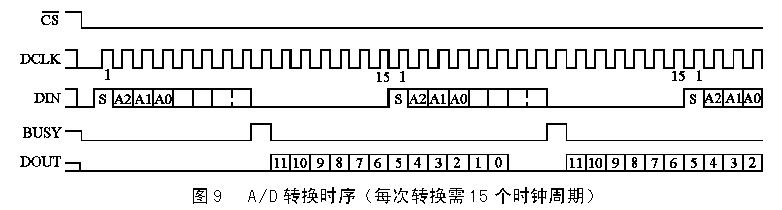
MAX1233/MAX1234要求/CS引腳在第一次轉(zhuǎn)換結(jié)束之前,解除高電平置位;否則,ADC將無法存儲轉(zhuǎn)換結(jié)果。在使用本應(yīng)用筆記之前,必須更新標(biāo)準(zhǔn)MINIQUSB+模塊固件,使SPI接口/CS引腳在第32個(gè)SCLK 1.4µs內(nèi)解除置位。在2MHz時(shí),32位自動(dòng)/CS受控模式將/CS保持低電平21.70µs。只需要對MAXQ2000微控制器非易失閃存MINIQUSB+固件更新一次。這一新固件和標(biāo)準(zhǔn)01.05.39基本固件后向兼容。除了提高SPI接口的/CS時(shí)序之外,固件更新還包括中斷驅(qū)動(dòng)脈沖累加器,在MAX1233/MAX1234配置為自動(dòng)掃描模式時(shí),支持驗(yàn)證/PENIRQ和/KEYIRQ是否發(fā)送其自清除中斷脈沖。/PENIRQ的持續(xù)時(shí)間取決于所配置的ADC轉(zhuǎn)換率,/KEYIRQ的持續(xù)時(shí)間取決于所配置的開關(guān)反彈時(shí)間。
1.3) 設(shè)置
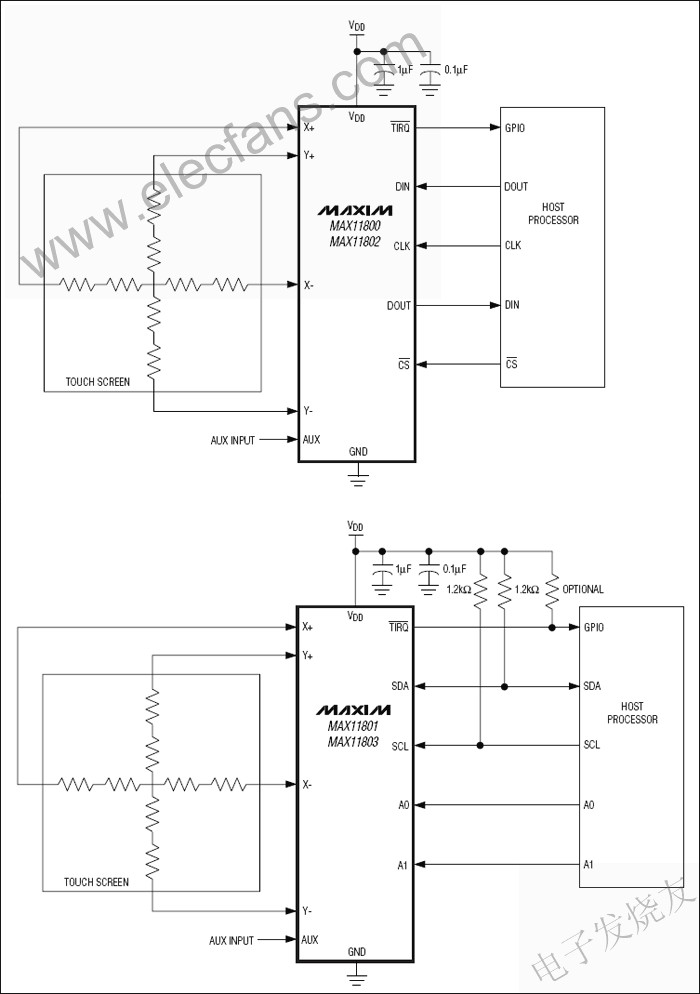
下載并解壓縮應(yīng)用筆記文件 (ZIP, 2.4MB)。根據(jù)圖1來組裝硬件。
- 按照表1連接MAX1234評估板連接器J1和MINIQUSB-X+擴(kuò)展電路板(包含在MINIQUSB+中)。可以采用3M®內(nèi)部連接器922576-40來替代連接MAX1234評估板的焊線,將其插入到J1中,以提供方便的連接點(diǎn)。不要連接終端模塊TB1。
表1. MAX1234評估板和MINIQUSB+電路板之間的連接設(shè)置
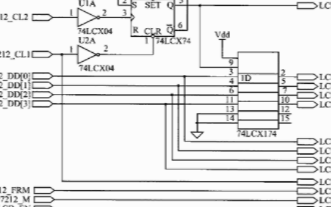
* 注釋:必須通過連接器J1來驅(qū)動(dòng)MAX1234評估板數(shù)字輸入,不能直接將其驅(qū)動(dòng)至U1周圍的測試點(diǎn)。必須采用板上MAX1841電平轉(zhuǎn)換器來驅(qū)動(dòng)MAX1234評估板數(shù)字信號。MAX1234 Signal MAX1234 EV Kit MINIQUSB-X+ MINIQUSB Signal GND J1-1 H2-8 GND VCC J1-7 H2-1 3.3V supply from MINIQUSB+ BUSY-Bar J1-27 H2-7 GPIO-K7 (MAXQ2000-INT2) PENIRQ-Bar J1-29 H1-3 GPIO-K6 (MAXQ2000-INT1) KEYIRQ-Bar J1-31 H1-8 GPIO-K5 (MAXQ2000-INT0) DOUT J1-35* H2-2 MISO (SPI master in, slave out) DIN J1-36* H2-5 MOSI (SPI master out, slave in) SCLK J1-37* H2-3 SCLK (SPI clock) CS-Bar J1-38 H2-4 CS-bar (SPI chip select) USB+5V J1-5 J4-7 USB+5V supply from PC
- 將MINIQUSB+插入到擴(kuò)展板的頂部。
- 連接MINIQUSB+和PC的USB端口。如果這是MINIQUSB+第一次和PC連接,將出現(xiàn)即插即用向?qū)АV改洗翱趯⑻崾酒骷?a target="_blank">驅(qū)動(dòng)器(它包含在隨附zip文件中)的安裝位置。
- 啟動(dòng)固件更新批處理文件FWUPDATE.BAT來更新MINIQUSB+固件。
- 固件更新完成后,從PC的USB端口斷開MINIQUSB+。

圖1. 硬件配置(在后面章節(jié)中連接觸摸屏)。
圖2. 系統(tǒng)圖片,使用一個(gè)3M內(nèi)部連接器來連接MINIQUSB+和MAX1234評估板。
1.4) 步驟
- 將MAX1234評估板跳接器JU1設(shè)置到“MAX1234”位置。
- 將MINIQUSB+連接至PC的USB端口。確定DACOUT電壓 = mid-scale (2.2V)。
- 啟動(dòng)DEMO1234.EXE程序。屏幕上將出現(xiàn)控制臺。
- 在控制臺中輸入下面的命令序列。
DEMO1234 Command* |
Expected Program Output | SPI data in |
Verification** |
C |
Board connected. Got board banner: Maxim MINIQUSB V01.05.41 > Firmware version is OK. (configured for SPI auto-CS 4-byte mode) (SCLK=2MHz) ... |
||
T W DD FF |
Write_Register(regAddr=0x000b wr_DAC_data ,
data=0x00ff
{(no bits defined for this register)}) result = 1
|
0x000b 0x00ff | DACOUT = full-scale (4.5V) |
T R DD |
Read_Register(regAddr=0x800b wr_DAC_data ) result = 1,
buffer = 0x00ff = 255
{(no bits defined for this register)}
|
0x800b 0x0000 | Data buffer = 0x00ff |
T W DD 80 |
Write_Register(regAddr=0x000b wr_DAC_data ,
data=0x0080
{(no bits defined for this register)}) result = 1
|
0x000b 0x0080 | DACOUT = mid-scale (2.2V) |
T R DD |
Read_Register(regAddr=0x800b wr_DAC_data ) result = 1,
buffer = 0x0080 = 128
{(no bits defined for this register)}
|
0x800b 0x0000 | data buffer = 0x0080 |
** Verification列出了可以進(jìn)行的物理測試,驗(yàn)證所執(zhí)行的命令。
1.5) SPI data in實(shí)例格式
SPI data in一列列出了驅(qū)動(dòng)至MAX1233/MAX1234 DIN引腳的SPI數(shù)據(jù),采用了十六進(jìn)制格式,最高有效字節(jié)在前。例如,序列0x000b 0x00ff中的SPI數(shù)據(jù)表示同步輸入到DIN的32位序列是0000 0000 0000 1011 0000 0000 1111 1111。第一位0用于寄存器寫操作,1用于寄存器讀操作。寄存器寫操作是0000 0000 a7-a0 d15-d0格式的32位SPI傳送過程。
寄存器讀操作是1000 0000 a7-a0 0000 0000格式的32位SPI傳送過程,在最后16位,接收到的數(shù)據(jù)從DOUT同步輸入。
2) 模擬I/O實(shí)例
下面的例子介紹了怎樣使用DEMO1234.EXE程序來控制DAC輸出,配置基準(zhǔn)電壓,測量AUX1/AUX2/BAT1/BAT2電壓輸入,以及測量內(nèi)部MAX1234溫度。2.1) 控制DAC輸出電壓
由兩個(gè)寄存器來控制DAC。寫入DAC數(shù)據(jù)寄存器來設(shè)置輸出電壓。寫入DAC控制寄存器來關(guān)斷或者對DAC上電。默認(rèn)上電狀態(tài)是DAC加電,DAC輸出位于量程中部。DAC滿量程電壓通常為AVDD的90% (最小85%,最大95%)。對于AVDD = 3.3V ±5%,DACOUT滿量程范圍在2.65V和3.27V之間,通常為2.96V。
對于AVDD = 5.0V ±5%,DACOUT滿量程范圍在4.02V和4.97V之間,通常為4.48V。
表3. DAC輸出命令
DEMO1234 Command |
Action | SPI data in |
MAX1233 (3.3V) | MAX1234 (5.0V) |
T W DD FF |
DACOUT = full-scale | 0x000b 0x00ff |
DACOUT = 2.96V | DACOUT = 4.48V |
T W DD 00 |
DACOUT = 0V | 0x000b 0x0000 |
DACOUT = 0.0V | DACOUT = 0.0V |
T W DD 80 |
DACOUT = mid-scale | 0x000b 0x0080 |
DACOUT = 1.485V | DACOUT = 2.25V |
T W DC 8000 |
Disable DAC | 0x0042 0x8000 |
DACOUT = 0.0V | DACOUT = 0.0V |
T W DC 0 |
Enable DAC | 0x0042 0x0000 |
DACOUT = 1.485V | DACOUT = 2.25V |
2.2) 選擇ADC基準(zhǔn)電源模式
ADC需要一個(gè)基準(zhǔn)電壓。對于典型的嵌入式系統(tǒng)工作,默認(rèn)設(shè)置是fine。在自動(dòng)上電模式(ADC3210 = 0000,RES10 = 00)下,MAX1233/MAX1234提供自己的內(nèi)部基準(zhǔn)電壓。在每次測量之前,內(nèi)部基準(zhǔn)自動(dòng)上電,測量完成后關(guān)斷。對于第一次診斷,保持上電模式(ADC3210 = 0000,RES10 = 01)支持使用手持式DVM對基準(zhǔn)電壓進(jìn)行外部驗(yàn)證。
ADC掃描選擇位設(shè)置為0000,寫入ADC控制寄存器(0x40),來設(shè)置ADC基準(zhǔn)電源模式。RES1/RES0位選擇基準(zhǔn)電源模式,基準(zhǔn)控制位RFV選擇內(nèi)部1.0V或者2.5V基準(zhǔn)(請參考MAX1233/MAX1234數(shù)據(jù)資料的表13)。
ADC控制字:x x 0 0 0 0 RES1 RES0 x x x x x x x RFV
表4. 內(nèi)部基準(zhǔn)命令
DEMO1234 Command |
Action | SPI data in |
Verification |
T W AC 0100 |
Internal 1V reference always powered; write ADC control word with ADC3210 = 0000, RES10 = 01, RFV = 0 |
0x0040 0x0100 |
Voltage at pin 12 REF is between 0.98V and 1.02V |
T W AC 0101 |
Internal 2.5V reference always powered; write ADC control word with ADC3210 = 0000, RES10 = 01, RFV = 1 |
0x0040 0x0101 |
Voltage at pin 12 REF is between 2.47V and 2.53V |
T W AC 0001 |
Internal 2.5V reference powered when needed; write ADC control word with ADC3210 = 0000, RES10 = 00, RFV = 1 |
0x0040 0x0001 |
Voltage at pin 12 REF will be powered only briefly as necessary |
表5. 外部基準(zhǔn)命令
DEMO1234 Command |
Action | SPI data in |
T W AC 0300 |
External reference must be provided; ADC_control_wr_demand_scan:(write)demand scan ADC_control_AD0000:configure reference ADC_control_RES11:external reference |
0x0040 0x0300 |
2.3) 測量外部電壓輸入AUX1和AUX2
表6. ADC測量命令序列DEMO1234 Command |
Action (Triggered by A/D3210 Bits) | SPI data in |
T M8 |
Measure AUX1 with 12-bit resolution and 3.5µs conversion rate | 0x0040 0x2301 0x8007 0x0000 |
T W AC 2301 |
Trigger ADC scan of AUX1; ADC control word 0x2301 means: ADC_control_wr_demand_scan ADC_control_AD1000 /* measure AUX1 */ ADC_control_RES11 /* 12-bit resolution */ ADC_control_AVG00 /* no averaging */ ADC_control_CNR00 /* conversion rate 3.5µs */ ADC_control_RFV /* RFV=1: VREF=2.5V */ |
0x0040 0x2301 |
T R A1 |
Read AUX1 result AUX1_code | 0x8007 0x0000 |
T M9 |
Measure AUX2 with 12-bit resolution and 3.5µs conversion rate | 0x0040 0x2701 0x8008 0x0000 |
2.4) 將AUX1和AUX2轉(zhuǎn)換結(jié)果譯為物理值
下面的C/C++偽代碼片斷總結(jié)了DEMO1234程序是怎樣解釋AUX1和AUX2轉(zhuǎn)換結(jié)果的。 /* ADC control resolution value selects num_codes 4096 (12-bit), 1024 (10-bit), or 256 (8-bit) */
int num_codes = 4096; /* ADC_control_RES11: 12-bit resolution */
/* Voltage that corresponds to the full-scale ADC code; may be internal 1V or 2.5V ref, or ext ref. */
double ADC_fullscale_voltage = 2.5; /* ADC_control_RFV=1: VREF=2.5V. RFV=0: VREF=1.0V. */
/* AUX1_code is the 16-bit result read by SPI command 0x8007 */
double AUX1_Voltage = (AUX1_code * ADC_fullscale_voltage) / num_codes;
/* AUX2_code is the 16-bit result read by SPI command 0x8008 */
double AUX2_Voltage = (AUX2_code * ADC_fullscale_voltage) / num_codes;
2.5) 測量外部電壓輸入BAT1和BAT2
表7. ADC測量命令序列DEMO1234 Command |
Action (Triggered by A/D3210 Bits) | SPI data in |
T M6 |
Measure BAT1 with 12-bit resolution and 3.5µs conversion rate | 0x0040 0x1b01 0x8005 0x0000 |
T W AC 1b01 |
Trigger ADC scan of BAT1; ADC control word 0x1b01 means: ADC_control_wr_demand_scan ADC_control_AD0110 /* measure BAT1 */ ADC_control_RES11 /* 12-bit resolution */ ADC_control_AVG00 /* no averaging */ ADC_control_CNR00 /* conversion rate 3.5µs */ ADC_control_RFV /* RFV=1: VREF=2.5V */ |
0x0040 0x1b01 |
T R B1 |
Read BAT1 result BAT1_code | 0x8005 0x0000 |
T W AC 1b21 |
Trigger ADC scan of BAT1; ADC control word 0x1b21 means: ADC_control_wr_demand_scan ADC_control_AD0110 /* measure BAT1 */ ADC_control_RES11 /* 12-bit resolution */ ADC_control_AVG00 /* no averaging */ ADC_control_CNR10 /* conversion rate 10µs */ ADC_control_RFV /* RFV=1: VREF=2.5V */ |
0x0040 0x1b21 |
T R B1 |
Read BAT1 result BAT1_code | 0x8005 0x0000 |
T M7 |
Measure BAT2 with 12-bit resolution and 3.5µs conversion rate | 0x0040 0x1f01 0x8006 0x0000 |
2.6) 將BAT1和BAT2轉(zhuǎn)換結(jié)果譯為物理值
下面的C/C++偽代碼片斷總結(jié)了DEMO1234程序是怎樣解釋BAT1和BAT2轉(zhuǎn)換結(jié)果的。注意:通過一個(gè)4:1輸入分配器來測量BAT1和BAT2。 /* ADC control resolution value selects num_codes 4096 (12-bit), 1024 (10-bit), or 256 (8-bit) */
int num_codes = 4096; /* ADC_control_RES11: 12-bit resolution */
/* Voltage that corresponds to the full-scale ADC code; may be internal 1V or 2.5V ref, or ext ref. */
double ADC_fullscale_voltage = 2.5; /* ADC_control_RFV=1: VREF=2.5V. RFV=0: VREF=1.0V. */
/* Note: BAT1 and BAT2 measure through a 4:1 input divider. */
/* BAT1_code is the 16-bit result read by SPI command 0x8005 */
double BAT1_Voltage = 4 * (BAT1_code * ADC_fullscale_voltage) / num_codes;
/* BAT2_code is the 16-bit result read by SPI command 0x8006 */
double BAT2_Voltage = 4 * (BAT2_code * ADC_fullscale_voltage) / num_codes;
2.7) 測量內(nèi)部溫度TEMP1和TEMP2
表8. ADC測量命令序列DEMO1234 Command |
Action (Triggered by A/D3210 Bits) | SPI data in |
T MA |
Measure TEMP1 with 12-bit resolution and 3.5µs conversion rate | 0x0040 0x2b01 0x8009 0x0000 |
T W AC 2b01 |
Trigger ADC scan of TEMP1; ADC control word 0x2b01 means: ADC_control_wr_demand_scan ADC_control_ AD1010 /* measure TEMP1 */ ADC_control_RES11 /* 12-bit resolution */ ADC_control_AVG00 /* no averaging */ ADC_control_CNR00 /* conversion rate 3.5µs */ ADC_control_RFV /* RFV=1: VREF=2.5V */ |
0x0040 0x2b01 |
T R T1 |
Read TEMP1 result TEMP1 _code | 0x8009 0x0000 |
T MC |
Measure TEMP1, TEMP2 with 12-bit resolution and 3.5µs conversion rate | 0x0040 0x3301 0x8009 0x0000 0x800a 0x0000 |
T W AC 3301 |
Trigger ADC scan of TEMP1 and TEMP2; ADC control word 0x3301 means: ADC_control_wr_demand_scan ADC_control_ AD1100 /* measure TEMP1,TEMP2 */ ADC_control_RES11 /* 12-bit resolution */ ADC_control_AVG00 /* no averaging */ ADC_control_CNR00 /* conversion rate 3.5µs */ ADC_control_RFV /* RFV=1: VREF=2.5V */ |
0x0040 0x3301 |
T R T1 |
Read TEMP1 result TEMP1 _code | 0x8009 0x0000 |
T R T2 |
Read TEMP2 result TEMP2 _code | 0x800a 0x0000 |
2.8) 將TEMP1轉(zhuǎn)換結(jié)果譯為物理值
下面的C/C++偽代碼片斷總結(jié)了DEMO1234程序是怎樣解釋TEMP1轉(zhuǎn)換結(jié)果的。 /* ADC control resolution value selects num_codes 4096 (12-bit), 1024 (10-bit), or 256 (8-bit) */
int num_codes = 4096; /* ADC_control_RES11: 12-bit resolution */
/* Voltage that corresponds to the full-scale ADC code; may be internal 1V or 2.5V ref, or ext ref. */
double ADC_fullscale_voltage = 2.5; /* ADC_control_RFV=1: VREF=2.5V. RFV=0: VREF=1.0V. */
/* TEMP1_code is the 16-bit result read by SPI command 0x8009 */
double TEMP1_Voltage = (TEMP1_code * ADC_fullscale_voltage) / num_codes;
/* Calibration values */
const double Temp1V_Room = 0.590; // temp1 voltage at room temperature 25C
const double Temp1K_Room = 298.15; // Room temperature Kelvins (298.15K=25C)
const double Temp1V_Per_K = -0.002; // TempCo -2mV per degree C
/* Convert to absolute temperature */
double Kelvin = (TEMP1_Voltage - Temp1V_Room) / Temp1V_Per_K + Temp1K_Room;
/* Optional conversion to commonly used temperature units */
double Centigrade = Kelvin - 273.15;
double Fahrenheit = (Centigrade * 9.0 / 5.0) + 32;
2.9) 將TEMP1和TEMP2轉(zhuǎn)換結(jié)果譯為物理值
下面的C/C++偽代碼片斷總結(jié)了DEMO1234程序是怎樣解釋TEMP1和TEMP2轉(zhuǎn)換結(jié)果的。TEMP2只在和TEMP1對比時(shí)才有意義。 /* ADC control resolution value selects num_codes 4096 (12-bit), 1024 (10-bit), or 256 (8-bit) */
int num_codes = 4096; /* ADC_control_RES11: 12-bit resolution */
/* Voltage that corresponds to the full-scale ADC code; may be internal 1V or 2.5V ref, or ext ref. */
double ADC_fullscale_voltage = 2.5; /* ADC_control_RFV=1: VREF=2.5V. RFV=0: VREF=1.0V. */
/* TEMP1_code is the 16-bit result read by SPI command 0x8009 */
double TEMP1_Voltage = (TEMP1_code * ADC_fullscale_voltage) / num_codes;
/* TEMP2_code is the 16-bit result read by SPI command 0x800a */
double TEMP2_Voltage = (TEMP2_code * ADC_fullscale_voltage) / num_codes;
/* Calibration values */
const double K_Per_Temp21_Delta_V = 2680.0; // nominal 2680 5/27/2002
/* Convert to absolute temperature */
double Kelvin = (TEMP2_Voltage - TEMP1_Voltage) * K_Per_Temp21_Delta_V;
/* Optional conversion to commonly used temperature units */
double Centigrade = Kelvin - 273.15;
double Fahrenheit = (Centigrade * 9.0 / 5.0) + 32;
2.10) 測量外部電壓輸入AUX1、AUX2、BAT1、BAT2和溫度
表9. ADC測量命令序列DEMO1234 Command |
Action (Triggered by A/D3210 Bits) | SPI data in |
T MB |
Measure BAT1/4, BAT2/4, AUX1, AUX2, TEMP1, TEMP2 with 12-bit resolution and 3.5µs conversion rate | 0x0040 0x2f01 0x8005 0x0000 0x8006 0x0000 0x8007 0x0000 0x8008 0x0000 0x8009 0x0000 0x800a 0x0000 |
T W AC 2f01 |
Trigger ADC scan of BAT1-2, AUX1-2, TEMP1-2; ADC control word 0x2f01 means: ADC_control_wr_demand_scan ADC_control_ AD1011 /* measure AUX1 etc. */ ADC_control_RES11 /* 12-bit resolution */ ADC_control_AVG00 /* no averaging */ ADC_control_CNR00 /* conversion rate 3.5µs */ ADC_control_RFV /* RFV=1: VREF=2.5V */ |
0x0040 0x2f01 |
T R B1 |
Read BAT1 result BAT1 _code | 0x8005 0x0000 |
T R B2 |
Read BAT2 result BAT2_code | 0x8006 0x0000 |
T R A1 |
Read AUX1 result AUX1 _code | 0x8007 0x0000 |
T R A2 |
Read AUX2 result AUX2 _code | 0x8008 0x0000 |
T R T1 |
Read TEMP1 result TEMP1 _code | 0x8009 0x0000 |
T R T2 |
Read TEMP2 result TEMP2 _code | 0x800a 0x0000 |
3) 觸摸屏實(shí)例
下面的例子解釋了怎樣使用DEMO1234.EXE程序來獲得觸摸屏數(shù)據(jù)。3.1) 低成本商用觸摸屏
在互聯(lián)網(wǎng)上搜索"PDA Digitizer/Glasstop",尋找合適的替代觸摸屏。高清觸摸屏玻璃的價(jià)格范圍在50美元至10美元之間,價(jià)格取決于型號以及玻璃是否全部貼在顯示屏上。3.2) 連接觸摸屏和評估板
MAX1234評估板提供突出插頭H5/H6來連接10mm柔性電纜或者長度更短的電纜。H6連接器的間距是0.5mm,比實(shí)際觸摸屏柔性電纜間距更精細(xì)。把柔性電纜插入H6,上鎖,選擇位于四條柔性電纜中每一電纜中心位置的H5引腳。跳接器連接H5和標(biāo)有U1的X+、Y+、X-以及Y-測試點(diǎn)。3.3) 檢驗(yàn)觸摸屏的連接
第一次連接觸摸屏?xí)r,通過下面的步驟來驗(yàn)證X和Y連接是否正確。可以有幾個(gè)觸摸屏交叉連接,但大部分不會正常工作。在這些例子中,我們假設(shè)X- = left,X+ = right,Y- = top,Y+ = bottom。表10. 觸摸屏物理連接驗(yàn)證命令序列
DEMO1234 Command |
Action | SPI data in |
Verification |
| Connect DVM to X+/GND | |||
T MD |
No measurement; drive Y+,Y- | 0x0040 0x3701 |
|
| Touch top left | X+ = approx. Y- | ||
| Touch top right | X+ = approx. Y- | ||
| Touch bottom left | X+ = approx. Y+ | ||
| Touch bottom right | X+ = approx. Y+ | ||
| Connect DVM to Y+/GND | |||
T ME |
No measurement; drive X+,X- | 0x0040 0x3b01 |
|
| Touch top left | Y+ = approx. X- | ||
| Touch top right | Y+ = approx. X+ | ||
| Touch bottom left | Y+ = approx. X- | ||
| Touch bottom right | Y+ = approx. X+ |
表11. 糾正觸摸屏連接問題
| Symptom | Correction |
| Touch coordinates are mirrored top-to-bottom | Swap the Y+ and Y- connections |
| Touch coordinates are mirrored left-to-right | Swap the X+ and X- connections |
| Touch coordinates are rotated 180 degrees | Swap the X+ and X- connections, and swap the Y+ and Y- connections |
| Touch coordinates are mirrored diagonally | Swap the X+ and Y+ connections, and swap the X- and Y- connections |
| Touch coordinates do not seem to track, and the distortion is not a simple flip/rotate/mirror transformation | Swap the X+ and Y+ connections; if distortion persists, swap the X+ and Y- connections; if distortion still persists, disconnect touch screen and use DVM to verify X+ to X- resistance and Y+ to Y- resistance; verify with no touch X+ and X- are isolated from Y+ and Y- |
3.4) 檢測觸摸屏的操作:根據(jù)需要掃描
在配置MAX1234檢測觸摸屏操作,根據(jù)需要數(shù)字化接觸屏的位置時(shí),寫入寄存器0x40 (ADC控制),其PENSTS=0,ADSTS=0 (請參考MAX1233/MAX1234數(shù)據(jù)資料的表6)。讀取寄存器0x00 (X軸)后,檢測到后續(xù)的觸摸屏操作時(shí),/PENIRQ信號鎖存至低電平,在寫入ADC控制寄存器測量X、Y軸之前,保持低電平。表12. 觸摸屏檢測命令序列:根據(jù)需要掃描
DEMO1234 Command |
Action | SPI data in |
Verification |
T W AC 0b01 |
Demand scan | 0x0040 0x0b01 |
|
T R AX |
Read conversion result register X | 0x8000 0x0000 |
|
P R 6 |
Read PENIRQ-bar pin status | PENIRQ = 1 | |
| Touch the touch screen | |||
P R 6 |
Read PENIRQ-bar pin status | PENIRQ = 0 | |
T M2 |
Measure X,Y,Z1,Z2 | 0x0040 0x0b01 0x8000 0x0000 0x8001 0x0000 0x8002 0x0000 0x8003 0x0000 |
|
P R 6 |
Read PENIRQ-bar pin status | PENIRQ = 1 | |
| Touch and hold the touch screen | |||
P R 6 |
Read PENIRQ-bar pin status | PENIRQ = 0 | |
T M2 |
Measure X,Y,Z1,Z2 | 0x0040 0x0b01 0x8000 0x0000 0x8001 0x0000 0x8002 0x0000 0x8003 0x0000 |
|
P R 6 |
Read PENIRQ-bar pin status | PENIRQ = 0 | |
T M2 |
Measure X,Y,Z1,Z2 | 0x0040 0x0b01 0x8000 0x0000 0x8001 0x0000 0x8002 0x0000 0x8003 0x0000 |
|
P R 6 |
Read PENIRQ-bar pin status | PENIRQ = 0 | |
| Release the touch screen | |||
P R 6 |
Read PENIRQ-bar pin status | PENIRQ = 0 | |
T M2 |
Measure X,Y,Z1,Z2 | 0x0040 0x0b01 0x8000 0x0000 0x8001 0x0000 0x8002 0x0000 0x8003 0x0000 |
|
P R 6 |
Read PENIRQ-bar pin status | PENIRQ = 1 |
3.5) 檢測觸摸屏操作:自動(dòng)掃描
在檢測觸摸屏操作,配置MAX1234,自動(dòng)數(shù)字化觸摸屏的接觸位置時(shí),寫入寄存器0x40 (ADC控制),其PENSTS=1,ADSTS=0 (請參考MAX1233/MAX1234數(shù)據(jù)資料的表6)。第一次接觸屏幕時(shí),/PENIRQ信號暫時(shí)變?yōu)榈碗娖剑⒃谧x取X寄存器之前不會變化。表13. 觸摸屏檢測命令序列:自動(dòng)掃描
DEMO1234 Command |
Action | SPI data in |
Verification |
| Optional: connect oscilloscope to PENIRQ-bar | |||
I C 1 3 |
Configure PENIRQ-bar pulse accumulator: falling-edge trigger | ||
I 0 1 |
Reset the pulse accumulator | ||
I R 1 |
Read the number of times PENIRQ-bar has pulsed low | count = 0 | |
T W AC 8bff |
Wait for touch, then scan X,Y,Z1,Z2 | 0x0040 0x8bff |
|
| Touch the touch screen | PENIRQ pulse | ||
I R 1 |
Read the number of times PENIRQ-bar has pulsed low | count has increased | |
T R P |
Read X,Y,Z1,Z2 conversion results | 0x8000 0x0000 0x8001 0x0000 0x8002 0x0000 0x8003 0x0000 |
|
| Touch the touch screen | PENIRQ pulse | ||
I R 1 |
Read the number of times PENIRQ-bar has pulsed low | count has increased | |
T R P |
Read X,Y,Z1,Z2 conversion results | 0x8000 0x0000 0x8001 0x0000 0x8002 0x0000 0x8003 0x0000 |
|
| Touch the touch screen | PENIRQ pulse | ||
I R 1 |
Read the number of times PENIRQ-bar has pulsed low | count has increased | |
T R P |
Read X,Y,Z1,Z2 conversion results | 0x8000 0x0000 0x8001 0x0000 0x8002 0x0000 0x8003 0x0000 |
4) 鍵盤和通用輸入/輸出引腳
下面的例子介紹了怎樣使用DEMO1234.EXE程序來掃描鍵盤,怎樣使用GPIO鍵盤掃描引腳。4.1) 配置鍵盤和GPIO引腳
GPIO控制寄存器將每個(gè)C1–C4和R1–R4引腳分別配置為輸入、輸出或者是鍵盤的一部分(請參考MAX1233/MAX1234數(shù)據(jù)資料的表26和表27)。此外,寫入GPIO上拉禁止寄存器,將輸出引腳配置為開漏輸出。表14. 鍵盤和GPIO配置實(shí)例
DEMO1234 Command |
Action | SPI data in |
T W GC FFFF |
Keypad: none; GPIO inputs: none |
0x004f 0xffff |
T W GC FF00 |
Keypad: none; GPIO outputs: none; |
0x004f 0xff00 |
T W GC 0000 |
GPIO outputs: none; GPIO inputs: none |
0x004f 0x0000 |
T W GC C8C0 |
GPIO outputs: C4,C3; GPIO input: R4 |
0x004f 0xc8c0 |
T W GP 4000 |
GPIO pullup disable: C3 | 0x004e 0x4000 |
4.2) 讀寫GPIO引腳
GPIO數(shù)據(jù)寄存器讀取GPIO輸入引腳,寫入GPIO輸出引腳。注意:在這些例子中,C3、C4和R4是引腳名稱,而不是元件名稱。表15. GPIO實(shí)例
DEMO1234 Command |
Action | SPI data in |
Verification |
T W GC C8C0 |
Keypad: (C2,C1) x (R3,R2,R1); GPIO outputs: C4,C3; GPIO input: R4 |
0x004f 0xc8c0 |
|
T W GP 4000 |
GPIO pullup disable: C3 | 0x004e 0x4000 |
|
| Connect external resistor between C3 pin and DVDD | |||
| Connect DVM to C4 pin | |||
T W GD 8000 |
GPIO write C4 = 1 | 0x000f 0x8000 |
C4 pin = high |
T W GD 0000 |
GPIO write C4 = 0 | 0x000f 0x0000 |
C4 pin = low |
T W GD 8000 |
GPIO write C4 = 1 | 0x000f 0x8000 |
C4 pin = high |
T W GD 0000 |
GPIO write C4 = 0 | 0x000f 0x0000 |
C4 pin = low |
| Connect DVM to C3 pin | |||
T W GD 4000 |
GPIO write C3 = 1 | 0x000f 0x4000 |
C3 pin = high |
T W GD 0000 |
GPIO write C3 = 0 | 0x000f 0x0000 |
C3 pin = low |
T W GD 4000 |
GPIO write C3 = 1 | 0x000f 0x4000 |
C3 pin = high |
T W GD 0000 |
GPIO write C3 = 0 | 0x000f 0x0000 |
C3 pin = low |
| Connect R4 pin to DVDD | |||
T R GD |
GPIO read | 0x800f 0x0000 |
Buffer = 0x0800 |
| Connect R4 pin to GND | |||
T R GD |
GPIO read | 0x800f 0x0000 |
Buffer = 0x0000 |
4.3) 檢測按鍵:自動(dòng)掃描
可以配置鍵盤控制寄存器在探測到有按鍵按下時(shí),自動(dòng)掃描鍵盤。表16. 按鍵命令序列:自動(dòng)掃描
DEMO1234 Command |
Action | SPI data in |
Verification |
| Optional: connect oscilloscope to KEYIRQ-bar | |||
I C 0 3 |
Configure KEYIRQ-bar pulse accumulator: falling-edge trigger | ||
I 0 0 |
Reset the pulse accumulator | ||
I R 0 |
Read the number of times KEYIRQ-bar has pulsed low | count = 0 | |
T W GC 0000 |
Keypad: (C4,C3,C2,C1) x (R4,R3,R2,R1); GPIO outputs: none; GPIO inputs: none |
0x004f 0x0000 |
|
T W KC bf00 |
Wait for keypress; maximum debounce and hold times |
0x0041 0xbf00 |
|
| Press and release R1C1 (key "1") | KEYIRQ pulse | ||
I R 0 |
Read the number of times KEYIRQ-bar has pulsed low | count has increased | |
T R KB |
Read raw keypad result | 0x8004 0x0000 |
0x0001 = R1C1 key |
| Press and release R2C2 (key "5") | KEYIRQ pulse | ||
I R 0 |
Read the number of times KEYIRQ-bar has pulsed low | count has increased | |
T R KB |
Read raw keypad result | 0x8004 0x0000 |
0x0020 = R2C2 key |
| Press and release R3C2 (key "8") | KEYIRQ pulse | ||
I R 0 |
Read the number of times KEYIRQ-bar has pulsed low | count has increased | |
T R KB |
Read raw keypad result | 0x8004 0x0000 |
0x0040 = R3C2 key |
4.4) 從鍵盤中屏蔽單個(gè)按鍵
使用鍵盤屏蔽寄存器和鍵盤2結(jié)果寄存器來屏蔽每個(gè)按鍵。屏蔽掉的按鍵被掃描至KPD寄存器,但是不在鍵盤2結(jié)果寄存器中報(bào)告。表17. 按鍵命令序列:屏蔽單個(gè)按鍵
DEMO1234 Command |
Action | SPI data in |
Verification |
T W GC 0000 |
Keypad: (C4,C3,C2,C1) x (R4,R3,R2,R1); GPIO outputs: none; GPIO inputs: none |
0x004f 0x0000 |
|
T W KC bf00 |
Wait for keypress; maximum debounce and hold times |
0x0041 0xbf00 |
|
T W KM 0020 |
Mask only R2C2 key | 0x0050 0x0020 |
|
| Press and release R1C1 (key "1") | |||
T R KB |
Read raw keypad result | 0x8004 0x0000 |
0x0001 = R1C1 key |
T R K2 |
Read masked keypad result | 0x8011 0x0000 |
0x0001 = R1C1 key |
| Press and release R2C2 (key "5") | |||
T R KB |
Read raw keypad result | 0x8004 0x0000 |
0x0020 = R2C2 key |
T R K2 |
Read masked keypad result | 0x8011 0x0000 |
0x0000 = no key |
| Press and release R3C2 (key "8") | |||
T R KB |
Read raw keypad result | 0x8004 0x0000 |
0x0040 = R3C2 key |
T R K2 |
Read masked keypad result | 0x8011 0x0000 |
0x0040 = R3C2 key |
4.5) 從鍵盤中屏蔽一列
使用鍵盤列寄存器來屏蔽所有列。不掃描屏蔽列,因此,KPD寄存器不會探測這些列中的按鍵。表18. 按鍵命令序列:屏蔽鍵盤的一列
DEMO1234 Command |
Action | SPI data in |
Verification |
T W GC 0000 |
Keypad: (C4,C3,C2,C1) x (R4,R3,R2,R1); GPIO outputs: none; GPIO inputs: none |
0x004f 0x0000 |
|
T W KC bf00 |
Wait for keypress; maximum debounce and hold times |
0x0041 0xbf00 |
|
T W KK 2000 |
Mask entire C2 column | 0x0051 0x2000 |
|
| Press and release R1C1 (key "1") | |||
T R KB |
Read raw keypad result | 0x8004 0x0000 |
0x0001 = R1C1 key |
| Press and release R2C2 (key "5") | |||
T R KB |
Read raw keypad result | 0x8004 0x0000 |
(previous value) |
| Press and release R3C2 (key "8") | |||
T R KB |
Read raw keypad result | 0x8004 0x0000 |
(previous value) |
| Press and release R2C3 (key "6") | |||
T R KB |
Read raw keypad result | 0x8004 0x0000 |
0x0200 = R2C3 key |
5) 電源管理
表19. 關(guān)斷命令DEMO1234 Command |
Action | SPI data in |
Verification |
T W AC C000 |
Power off ADC | 0x0040 0xc000 |
— |
T W AC 0300 |
Power off internal reference | 0x0040 0x0300 |
REF = not driven |
T W DC 8000 |
Disable DAC | 0x0042 0x8000 |
DACOUT = 0.0V |
T W KC C000 |
Power off keypad | 0x0041 0xc000 |
— |
6) 菜單系統(tǒng)
全部源代碼實(shí)現(xiàn)下面的控制臺菜單系統(tǒng),它連接至MINIQUSB+模塊。CmodComm測試程序主菜單—在連接前
A) adjust timing parameters
L) CmodLog... functions
C) connect
D) Debug Messages
X) exit
對C (連接)命令的響應(yīng)
C
Hardware supports optimized native SMBus commands.
Board connected.
Got board banner: Maxim MINIQUSB V01.05.41 >
Firmware version is OK.
(configured for SPI auto-CS 4-byte mode) (SCLK=2MHz) ...
主菜單—連接后有效
T) Test the device
8) CmodP8Bus... functions
A) adjust timing parameters
L) CmodLog... functions
P) CmodPin... functions
S) CmodSpi... functions
M) CmodSMBus... functions
$) CmodCommStringWrite list of hex codes
R) CmodBoardReset
D) Disconnect
測試菜單命令—連接后有效
R) Read register
W) Write register
M0) measure no measurement; configure reference
M1) measure X,Y
M2) measure X,Y,Z1,Z2
M3) measure X
M4) measure Y
M5) measure Z1,Z2
M6) measure BAT1/4
M7) measure BAT2/4
M8) measure AUX1
M9) measure AUX2
MA) measure TEMP1
MB) measure BAT1/4,BAT2/4,AUX1,AUX2,TEMP1,TEMP2
MC) measure TEMP1,TEMP2
MD) no measurement; drive Y+,Y-
ME) no measurement; drive X+,X-
MF) no measurement; drive Y+,X-
.) Exit this menu
6.1) 寄存器讀/寫命令
表20. 讀取寄存器助記符DEMO1234 Command |
Mnemonic | SPI data in |
T R A1 |
Test Read AUX1 register | 0x8007 0x0000 |
T R A2 |
Test Read AUX2 register | 0x8008 0x0000 |
T R AC |
Test Read ADC_control register | 0x8040 0x0000 |
T R AX |
Test Read X register | 0x8000 0x0000 |
T R AY |
Test Read Y register | 0x8001 0x0000 |
T R AZ1 |
Test Read Z1 register | 0x8002 0x0000 |
T R AZ2 |
Test Read Z2 register | 0x8003 0x0000 |
T R B1 |
Test Read BAT1 register | 0x8005 0x0000 |
T R B2 |
Test Read BAT2 register | 0x8006 0x0000 |
T R DC |
Test Read DAC_control register | 0x8042 0x0000 |
T R DD |
Test Read DAC_data register | 0x800b 0x0000 |
T R GC |
Test Read GPIO_control register | 0x804f 0x0000 |
T R GD |
Test Read GPIO_data register | 0x800f 0x0000 |
T R GP |
Test Read GPIO_pullup register | 0x804e 0x0000 |
T R K1 |
Test Read KPDATA1 register | 0x8010 0x0000 |
T R K2 |
Test Read KPDATA2 register | 0x8011 0x0000 |
T R KB |
Test Read KPD register | 0x8004 0x0000 |
T R KC |
Test Read KEY_control register | 0x8041 0x0000 |
T R KK |
Test Read KPCOLMASK register | 0x8051 0x0000 |
T R KM |
Test Read KPKEYMASK register | 0x8050 0x0000 |
T R T1 |
Test Read TEMP1 register | 0x8009 0x0000 |
T R T2 |
Test Read TEMP2 register | 0x800a 0x0000 |
表21. 寫入寄存器助記符
DEMO1234 Command |
Mnemonic | SPI data in |
T W AC hexValue |
Test Write ADC_control register | 0x0040 hexValue |
T W DC hexValue |
Test Write DAC_control register | 0x0042 hexValue |
T W DD hexValue |
Test Write DAC_data register | 0x000b hexValue |
T W GC hexValue |
Test Write GPIO_control register | 0x004f hexValue |
T W GD hexValue |
Test Write GPIO_data register | 0x000f hexValue |
T W GP hexValue |
Test Write GPIO_pullup register | 0x004e hexValue |
T W KC hexValue |
Test Write KEY_control register | 0x0041 hexValue |
T W KK hexValue |
Test Write KPCOLMASK register | 0x0051 hexValue |
T W KM hexValue |
Test Write KPKEYMASK register | 0x0050 hexValue |
表22. 觸摸屏測量命令序列
DEMO1234 Command |
Action (Triggered by A/D3210 Bits) | SPI data in Sequence |
T M1 |
Measure X,Y | 0x0040 0x07010x8000 0x00000x8001 0x0000 |
T M2 |
Measure X,Y,Z1,Z2 | 0x0040 0x0b010x8000 0x00000x8001 0x00000x8002 0x00000x8003 0x0000 |
T M3 |
Measure X | 0x0040 0x0f010x8000 0x0000 |
T M4 |
Measure Y | 0x0040 0x13010x8001 0x0000 |
T M5 |
Measure Z1,Z2 | 0x0040 0x17010x8002 0x00000x8003 0x0000 |
T MD |
No measurement; drive Y+,Y- | 0x0040 0x3701 |
T ME |
No measurement; drive X+,X- | 0x0040 0x3b01 |
T MF |
No measurement; drive Y+,X- | 0x0040 0x3f01 |
6.2) 中斷和狀態(tài)引腳命令
表23. 引腳狀態(tài)讀取命令DEMO1234 Command |
Action | SPI data in |
P R 5 |
Read KEYIRQ-bar pin status | N/A |
I C 0 3 |
Enable KEYIRQ-bar falling-edge trigger pulse accumulator | N/A |
I C 0 1 |
Enable KEYIRQ-bar rising-edge trigger pulse accumulator | N/A |
I C 0 0 |
Disable KEYIRQ-bar pulse accumulator | N/A |
I R 0 |
Read the number of times KEYIRQ-bar has pulsed low | N/A |
I 0 0 |
Clear the KEYIRQ-bar pulse accumulator | N/A |
P R 6 |
Read PENIRQ-bar pin status | N/A |
I C 1 3 |
Enable PENIRQ-bar falling-edge trigger pulse accumulator | N/A |
I C 1 1 |
Enable PENIRQ-bar rising-edge trigger pulse accumulator | N/A |
I C 1 0 |
Disable PENIRQ-bar pulse accumulator | N/A |
I R 1 |
Read the number of times PENIRQ-bar has pulsed low | N/A |
I 0 1 |
Clear the PENIRQ-bar pulse accumulator | N/A |
P R 7 |
Read BUSY-bar pin status | N/A |
6.3) 加入到更新后的MINIQUSB+固件中的命令
表24. 更新后MINIQUSB+固件01.05.40支持的SPI命令DEMO1234 Command |
Action | CPOL | CPHA | CS-Bar Control | AF Length |
S C L0 |
Configure SPI for CPOL=0 | 0 | — | GPIO-K9 | 1 byte |
S C L1 |
Configure SPI for CPOL=1 | 1 | — | GPIO-K9 | 1 byte |
S C A0 |
Configure SPI for CPHA=0 | — | 0 | GPIO-K9 | 1 byte |
S C A1 |
Configure SPI for CPHA=1 | — | 1 | GPIO-K9 | 1 byte |
S C C0 |
Configure SPI for 8-bit | — | — | GPIO-K9 | 1 byte |
S C C1 |
Configure SPI for 8-bit auto-CS-bar | — | — | Automatic | 1 byte |
S C C2 |
Configure SPI for 16-bit auto-CS-bar | — | — | Automatic | 2 bytes |
S C C3 |
Configure SPI for 24-bit auto-CS-bar | — | — | Automatic | 3 bytes |
S C C4 |
Configure SPI for 32-bit auto-CS-bar | — | — | Automatic | 4 bytes |
$ 2 AE 00 |
Configure SPI for 8-bit | 0 | 0 | GPIO-K9 | 1 byte |
$ 2 AE 01 |
Configure SPI for 8-bit | 0 | 1 | GPIO-K9 | 1 byte |
$ 2 AE 02 |
Configure SPI for 8-bit | 1 | 0 | GPIO-K9 | 1 byte |
$ 2 AE 03 |
Configure SPI for 8-bit | 1 | 1 | GPIO-K9 | 1 byte |
$ 2 AE 08 |
Configure SPI for 8-bit auto-CS-bar | 0 | 0 | Automatic | 1 byte |
$ 2 AE 09 |
Configure SPI for 8-bit auto-CS-bar | 0 | 1 | Automatic | 1 byte |
$ 2 AE 0A |
Configure SPI for 8-bit auto-CS-bar | 1 | 0 | Automatic | 1 byte |
$ 2 AE 0B |
Configure SPI for 8-bit auto-CS-bar | 1 | 1 | Automatic | 1 byte |
$ 2 AE 18 |
Configure SPI for 16-bit auto-CS-bar | 0 | 0 | Automatic | 2 bytes |
$ 2 AE 19 |
Configure SPI for 16-bit auto-CS-bar | 0 | 1 | Automatic | 2 bytes |
$ 2 AE 1A |
Configure SPI for 16-bit auto-CS-bar | 1 | 0 | Automatic | 2 bytes |
$ 2 AE 1B |
Configure SPI for 16-bit auto-CS-bar | 1 | 1 | Automatic | 2 bytes |
$ 2 AE 28 |
Configure SPI for 24-bit auto-CS-bar | 0 | 0 | Automatic | 3 bytes |
$ 2 AE 29 |
Configure SPI for 24-bit auto-CS-bar | 0 | 1 | Automatic | 3 bytes |
$ 2 AE 2A |
Configure SPI for 24-bit auto-CS-bar | 1 | 0 | Automatic | 3 bytes |
$ 2 AE 2B |
Configure SPI for 24-bit auto-CS-bar | 1 | 1 | Automatic | 3 bytes |
$ 2 AE 38 |
Configure SPI for 32-bit auto-CS-bar | 0 | 0 | Automatic | 4 bytes |
$ 2 AE 39 |
Configure SPI for 32-bit auto-CS-bar | 0 | 1 | Automatic | 4 bytes |
$ 2 AE 3A |
Configure SPI for 32-bit auto-CS-bar | 1 | 0 | Automatic | 4 bytes |
$ 2 AE 3B |
Configure SPI for 32-bit auto-CS-bar | 1 | 1 | Automatic | 4 bytes |
$ 2 AF xx |
Perform an 8-bit SPI transfer (CS-bar = GPIO or auto-CS-bar = 1-byte) | — | — | — | 1 byte |
$ 3 AF xx xx |
Perform a 16-bit SPI transfer (requires auto-CS-bar = 2-byte mode) | — | — | — | 2 bytes |
$ 4 AF xx xx xx |
Perform a 24-bit SPI transfer (requires auto-CS-bar = 3-byte mode) | — | — | — | 3 bytes |
$ 5 AF xx xx xx xx |
Perform a 32-bit SPI transfer (requires auto-CS-bar = 4-byte mode) | — | — | — | 4 bytes |
$ 2 F9 0 |
Drive CS-bar pin low | — | — | GPIO-K9 | — |
$ 2 F9 1 |
Drive CS-bar pin high | — | — | GPIO-K9 | — |
表25. 更新后MINIQUSB+固件01.05.41中的中斷脈沖累加器命令
DEMO1234 Command |
Action | Int | GPIO Input | Firmware Command |
$ 2 C3 00 |
Query which of the C3 commands are supported; the return value is a 2-byte bitmap of commands C300 to C30F, msb first | — | — | C3 00 |
I Q 0 |
Query configuration of pulse accumulator | INT0 | GPIO-K5 | C3 01 00 |
I Q 1 |
Query configuration of pulse accumulator | INT1 | GPIO-K6 | C3 01 01 |
I Q 2 |
Query configuration of pulse accumulator | INT2 | GPIO-K7 | C3 01 02 |
I Q 3 |
Query configuration of pulse accumulator | INT3 | GPIO-K8 | C3 01 03 |
I C 0 0 |
Configure pulse accumulator: disable interrupt | INT0 | GPIO-K5 | C3 02 00 00 |
I C 1 0 |
Configure pulse accumulator: disable interrupt | INT1 | GPIO-K6 | C3 02 01 00 |
I C 2 0 |
Configure pulse accumulator: disable interrupt | INT2 | GPIO-K7 | C3 02 02 00 |
I C 3 0 |
Configure pulse accumulator: disable interrupt | INT3 | GPIO-K8 | C3 02 03 00 |
I C 0 1 |
Configure pulse accumulator: rising-edge trigger | INT0 | GPIO-K5 | C3 02 00 01 |
I C 1 1 |
Configure pulse accumulator: rising-edge trigger | INT1 | GPIO-K6 | C3 02 01 01 |
I C 2 1 |
Configure pulse accumulator: rising-edge trigger | INT2 | GPIO-K7 | C3 02 02 01 |
I C 3 1 |
Configure pulse accumulator: rising-edge trigger | INT3 | GPIO-K8 | C3 02 03 01 |
I C 0 3 |
Configure pulse accumulator: falling-edge trigger | INT0 | GPIO-K5 | C3 02 00 03 |
I C 1 3 |
Configure pulse accumulator: falling-edge trigger | INT1 | GPIO-K6 | C3 02 01 03 |
I C 2 3 |
Configure pulse accumulator: falling-edge trigger | INT2 | GPIO-K7 | C3 02 02 03 |
I C 3 3 |
Configure pulse accumulator: falling-edge trigger | INT3 | GPIO-K8 | C3 02 03 03 |
I R 0 |
Read pulse accumulator | INT0 | GPIO-K5 | C3 03 00 |
I R 1 |
Read pulse accumulator | INT1 | GPIO-K6 | C3 03 01 |
I R 2 |
Read pulse accumulator | INT2 | GPIO-K7 | C3 03 02 |
I R 3 |
Read pulse accumulator | INT3 | GPIO-K8 | C3 03 03 |
I 0 0 |
Clear pulse accumulator | INT0 | GPIO-K5 | C3 04 00 |
I 0 1 |
Clear pulse accumulator | INT1 | GPIO-K6 | C3 04 01 |
I 0 2 |
Clear pulse accumulator | INT2 | GPIO-K7 | C3 04 02 |
I 0 3 |
Clear pulse accumulator | INT3 | GPIO-K8 | C3 04 03 |
I S 0 xx |
Set pulse accumulator count xx = 0 to 255 | INT0 | GPIO-K5 | C3 05 00 xx |
I S 1 xx |
Set pulse accumulator count xx = 0 to 255 | INT1 | GPIO-K6 | C3 05 01 xx |
I S 2 xx |
Set pulse accumulator count xx = 0 to 255 | INT2 | GPIO-K7 | C3 05 02 xx |
I S 3 xx |
Set pulse accumulator count xx = 0 to 255 | INT3 | GPIO-K8 | C3 05 03 xx |















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論