 電子發燒友App
電子發燒友App


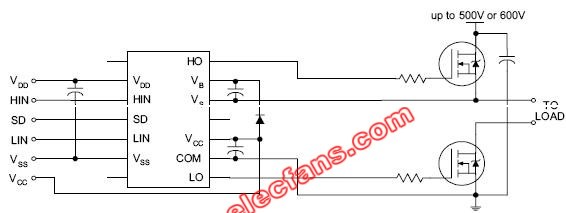
目前,可逆H全橋PWM直流電機控制系統主要采用功率MOSFET、IGBT管作為開關管,而開關管的驅動電路通常采用集成驅動電路,將微機的PWM控制信號轉換成同步高壓驅動信號。IR2110芯片是一種H半橋(獨立一橋臂雙通道)、柵極驅動、高壓、高速單片式專用功率器件集成驅動電路,2片IR2110就能構成H全橋功率MOS-FET管可逆PWM他勵直流控制系統主控回路。IR2110芯片高端懸浮通道采用外部自舉電容產生懸浮電壓源VBS,與低端通道共用一個外接驅動電源VCC,兼有光耦隔離和電磁隔離的優點,配置所有高壓引腳在芯片一側、獨立的邏輯地和功率地,使芯片結構緊固可靠。
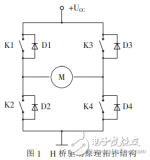
1、IR2110H橋典型驅動電路
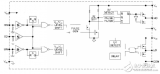
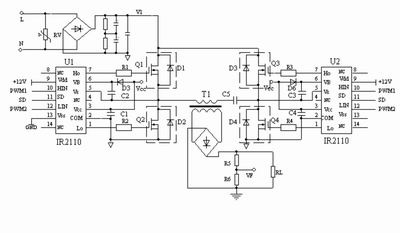
基于2片IR2110的H橋4片MOSFET管直流電機典型驅動電路如圖1所示。當VT1、VT4導通時,電機正轉;當VT2、VT3導通時,電機反轉;當VT2、VT4導通時,電機兩極與地短接,電機剎車能耗制動。
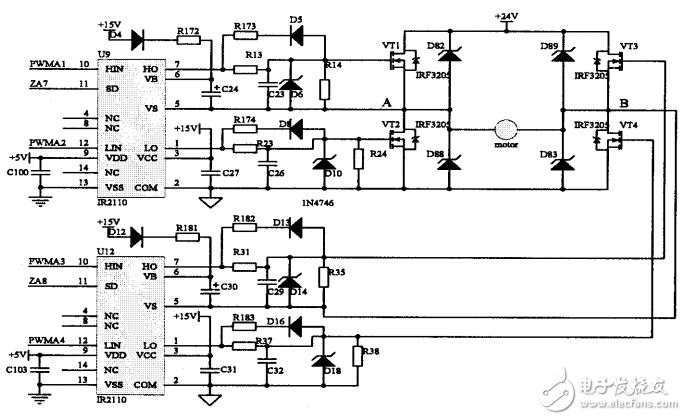
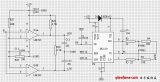
圖1 ?基于IR2110的H橋直流電機典型驅動電路
C24,C30是自舉電容,D4,D12是自舉快恢復二極管,防止VT1、VT3導通時高電壓串入VCC端損壞該芯片。C27、C31是功率電源VCC的濾波電容,C100、C103是邏輯電源VDD的濾波電容。R172,R181是自舉電容C24,C30充電回路的限流自舉電阻,防止電容過充、VS出現低于地電位的情況發生。
電阻R13,R23,R31,R37是IR2110輸出通道到MOSFET管柵極間的限流電阻,取值為幾十Ω,防止柵極電流DI/DT過大損壞MOSFET管。C23,C26,C29,C32是濾波電容,與電阻R13,R23,R31,R37組成RC低通濾波電路,對IR2110輸出信號進行低通濾波。
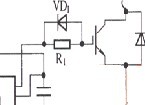
功率場效應管IRF3205的柵-源極電壓容限為±20V,而IR2110內部沒有連接于柵極的限壓元件,MOSFET漏極產生的浪涌電壓會通過漏柵極之間的米勒電容耦合到柵極上擊穿柵極的氧化層,所以在MOS管柵-源極之間加分壓電阻和穩壓二極管來箝位柵-源極電壓,同時保護IR2110不被MOS管短路高壓竄入損壞。穩壓二極管D6,D10,D14,D18穩壓在18V左右,電阻R14,R24,R35、R35對IR2110輸出信號分壓,有效降低柵極電壓。
D5,D8,D13,D16是在IR2110發出關斷信號時,給功率場效應管從導通狀態切換到關斷狀態提供一個快速釋放電荷通道的快恢復二極管。由于IR2110的導通傳播延時典型值為120nS,關斷傳播延時典型值為94nS,僅僅相差26nS,快恢復二極管可進一步加快功率MOSFET的關斷時間有利于增強橋臂開關管先關斷后導通死區周期,防止同一臂上下兩個功率場效應管同時導通短路燒毀。電阻R173,R174,R182,R183用于限制功率場效應管釋放電流,防止大電流損壞IR2110[8],取值為幾Ω。D82,D83,D88,D89是用來鉗位功率MOS-FET管開關過程中漏源極浪涌電壓的穩壓二極管。
2、IR2110自舉電路原理
IR2110的自舉電路是一種簡約型高端浮動供電模式,滿足一般PWM控制需要。結合圖1的U9,介紹IR2110自舉電路的工作原理。當VT1截止,VT4導通期間,將A點(VS)的電位拉低到地,+15V(VCC)通過自舉電阻(R172)和自舉二級管(D4)給自舉電容(C24)充電,通過電容C24在VB和VS之間形成一個懸浮電源,作為IR2110的上通道(高端)邏輯電源,維持IR2110高端輸出引腳VH輸出正常電平,為上橋臂主開關器件VT1提供柵極驅動電壓。正是由于自舉電容的存在,使IR2110控制同一橋臂上、下主開關器件的驅動電路只需一個外接電源。
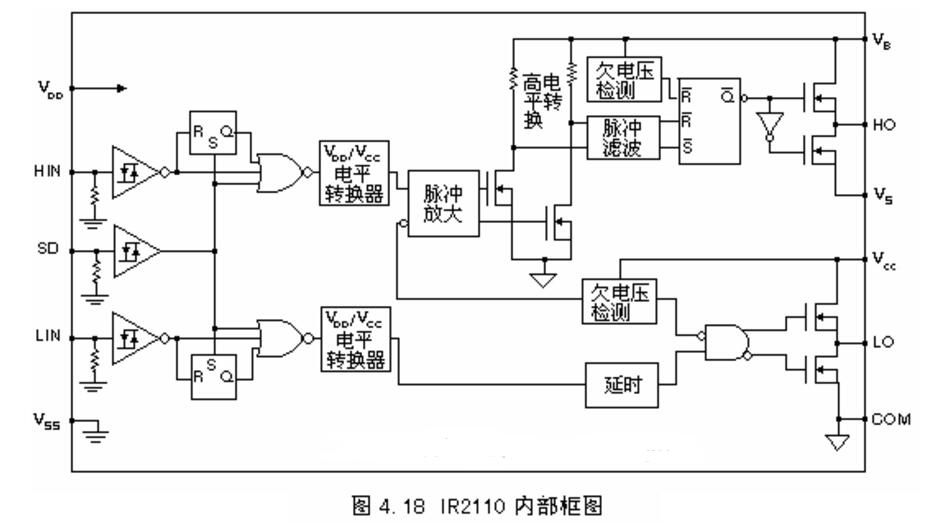
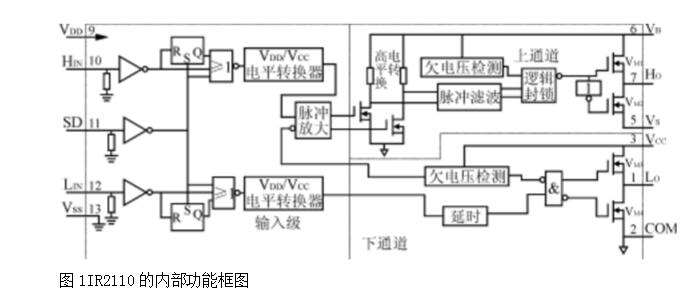
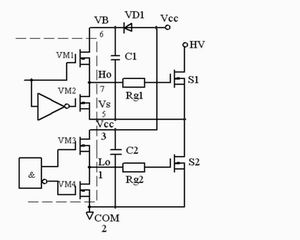
當VT1導通時,C24放電以維持高端導通。當C24電荷沒有充滿,或者電容充滿但高端持續工作時間較長,導致電容放電過度,IR2110高端懸浮電源VB的內部欠壓檢測保護邏輯就會動作,將VH拉為低電平,使驅動電路無法正常工作。IR2110的內部結構圖清楚反映了低端電源VCC和高端懸浮電源VB的欠電壓檢測電路結構,如圖2所示。
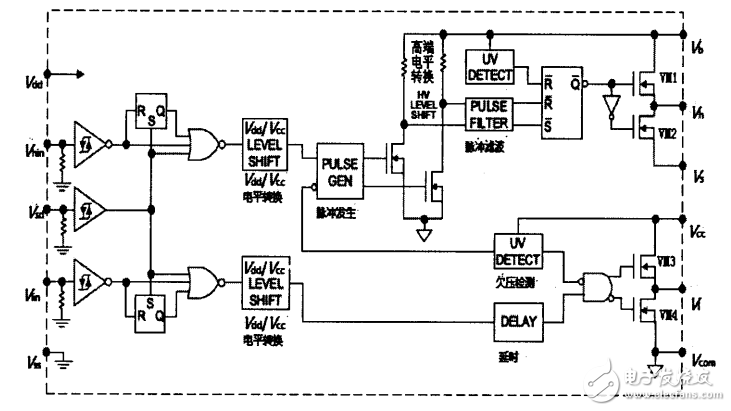
圖2 IR2110內部結構框圖
3、自舉電路參數計算
3.1、自舉電容估算
自舉電容必須能提供不低于MOSFET管柵極電荷導通所需的電荷,并且在高端主開關器件開通期間保持其電壓。工程估算公式如下:

其中:QG-MOSFET管門極電荷(可由MOS-FET手冊中查到);VCC-充電電源電壓;VLS-下半橋MOSFET導通柵源閾值電壓,一般為2-4V;VMIn-VB和VS之間的最小電壓(可由IR2110手冊中查到,VBSUVMIn=7.4V);VF-自舉快恢復二極管的正向管壓降,一般為1.5V。
當采用MOSFET管IRF3205構成H橋可逆PWM驅動電路時,功率電源=15V。查IRF3205.PDF,QG=146nC。查IR2110.PDF,VMIn=7.4V。代入式(1)得:

工程上,再保留一定的余量,取估算值的2-3倍。CBS=0.1μF。
3.2、自舉電阻估算
自舉電阻RBS應滿足:CBSRBS>T(2)
查IR2110數據手冊得T=10nS。

工程上,再取估算值的2倍左右,RBS=3.3Ω。
3.3、自舉二極管
自舉二極管用于防止上橋MOS管導通時母線高壓反竄入VCC端損壞IR2110芯片。反向耐壓必須大于母線高壓峰值[4],電流必須大于柵極電荷與開關頻率之積,即
I>F×QG(3)
通常選用漏電流小的快恢復二極管,反向恢復時間應小于IR2110導通傳播延時典型值120nS。若設PWM頻率F=10kHz,IRF3205的柵極QG=146nC,則自舉二極管的正向電流
I>F×QG=10×103×146×10-9=1.46MA
4、實驗結果
在圖1基礎上,用TMS320LF2407A為控制器對他勵直流電機進行空載啟動與減速制動控制試驗。電機的銘牌參數如下:Vn=24V,In=62A,nE=26000R/MIn[10]。主開關器件為功率MOS-FETIRF3205。PWM恒定頻率為10kHz,通過調節PWM的占空比調節他勵直流電機的電樞電壓,實現軟啟動與減速制動。
DSP的電機啟動PWM程序初始化設定占空比從10%開始,每隔20MS,檢測電樞電流ID,若ID超過2IE(IE電樞額定電流),則立即減小CM-PR1,即減小占空比,實施過流保護。若沒有超過,CMPR1增加一個步距,一般設定為T1PR周期計數值的0.2%-0.5%左右。所謂帶載突跳式啟動,保證啟動電磁轉矩大于負載轉矩,但又保證啟動電流不超過2倍額定電流(2IE)的逐漸上升軟啟動。DSP的電機減速制動PWM程序是逐漸減少占空比,直到為0。圖3(A)所示為軟啟動占空比達到30%時IR2110驅動的輸出的波形;圖3(B)所示為軟啟動結束占空比達到90%時IR2110驅動的輸出波形。

5、結論
功率MOSFET管集成驅動電路IR2110的自舉電路簡化了H橋高端懸浮電源配置問題,同時對自舉電路的參數優化設計提出一定要求,對PWM控制頻率也有一定限制。通過分析IR2110的特性和驅動MOSFET的應用特點,介紹了IR2110的自舉電路優化設計、MOSFET的保護電路等。在基于TMS320LDF2407A為控制器、IR2110為驅動器的他勵直流電機H橋PWM調速系統上實驗表明:IR2110能有效控制功率MOS-FET管實現他勵直流電機的軟啟動和減速制動以及過流保護。












 工商網監
工商網監
評論