 電子發(fā)燒友App
電子發(fā)燒友App


在當(dāng)今的汽車中,不斷增加的電力負(fù)荷給電池帶來(lái)了巨大的挑戰(zhàn)。超過(guò)半數(shù)因?yàn)?a target="_blank">電力系統(tǒng)導(dǎo)致的汽車故障都可以向上追溯到鉛酸電池,如 果了解電池狀態(tài),這些故障是可以避免的。另外,諸如起停系統(tǒng)(start-stop)或智能交流發(fā)電機(jī)控制等微型混合動(dòng)力汽車的新功能也要求確切地了解電 池狀態(tài)。
電池管理系統(tǒng)(BMS)可通過(guò)快速、可靠地監(jiān)測(cè)啟動(dòng)能力中的充電狀態(tài)(SoC)、健康狀態(tài)(SoH)和功能狀態(tài)(SoF),提供必要的信 息。因此,BMS可以最大限度地降低因?yàn)殡姵匾馔夤收隙鴮?dǎo)致的汽車故障次數(shù),從而實(shí)現(xiàn)最長(zhǎng)電池使用時(shí)間和最大電池能效,并可以支持二氧化碳減排功能。 BMS的主要元件是智能電池傳感器(IBS),它可以測(cè)量電池端電壓、電流和溫度,并計(jì)算出電池的狀態(tài)。
本文將介紹如何實(shí)施使用最先進(jìn)的算法來(lái)計(jì)算SoC、SoH和SoF的BMS,以及如何在飛思卡爾的鉛酸電池IBS中高效地實(shí)施上述功能。
1) 簡(jiǎn)介
過(guò)去,汽車電池的充電級(jí)別一直是一項(xiàng)無(wú)法了解的因素,在許多情況下會(huì)導(dǎo)致汽車故障。根據(jù)汽車使用壽命的不同,與電池有關(guān)的故障率可能攀升至10000 ppm [1]。
對(duì)汽車電池來(lái)說(shuō)另一個(gè)已經(jīng)存在的非常嚴(yán)峻的挑戰(zhàn)來(lái)自不斷增長(zhǎng)的電力與功耗需求,同時(shí)還需要降低二氧化碳排放。
因?yàn)?a target="_blank">電子系統(tǒng)在汽車創(chuàng)新領(lǐng)域里起著非常重要的作用,所以隨著汽車在舒適性功能、安全相關(guān)功能電子化、混合動(dòng)力汽車、駕駛輔助和信息娛樂(lè)方面的發(fā)展,對(duì)電力供應(yīng)的需求也越來(lái)越高。
在另一方面,越來(lái)越多的法規(guī)出臺(tái)呼吁減少二氧化碳排放和燃油消耗。
為了應(yīng)對(duì)上述限制要求,需要采用高級(jí)電力管理系統(tǒng),來(lái)確保在各種工作場(chǎng)景中電池都能為引擎啟動(dòng)提供足夠的電力。
2) 電力管理系統(tǒng)
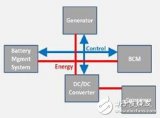
通常,支持啟動(dòng)-停止系統(tǒng)所用的典型供電網(wǎng)絡(luò)包括一個(gè)車身控制模塊(BCM)、一個(gè)電池管理系統(tǒng)(BMS)、一個(gè)發(fā)電機(jī)和一個(gè)DC/DC轉(zhuǎn)換器(請(qǐng)參見(jiàn)圖1)。
BMS通過(guò)專用的負(fù)載管理算法為BCM提供電池狀態(tài)信息,通過(guò)控制發(fā)電機(jī)和DC/DC轉(zhuǎn)換器穩(wěn)固和管理供電網(wǎng)絡(luò)。DC/DC轉(zhuǎn)換器為汽車內(nèi)部的各個(gè)電氣元件供電。
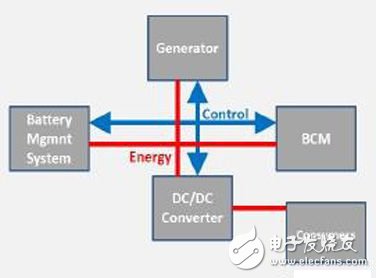
圖1:典型啟動(dòng)-停止系統(tǒng)中使用的供電網(wǎng)絡(luò)示例
Generator:發(fā)電機(jī);Battery mgmnt system:電池管理系統(tǒng);Energy:電力;Control:控制;AC/DC Converter:AC/DC 轉(zhuǎn)換器;Consumers:電氣元件
通常,鉛酸電池的BMS直接安裝在電池夾的智能連接器中。連接器包括一個(gè)低阻值分流電阻(通常在100uOhm范圍內(nèi))和一個(gè)帶有高度集 成設(shè)備的小型PCB,該集成設(shè)備具有準(zhǔn)確的測(cè)量和處理功能,稱之為智能電池傳感器(IBS,參見(jiàn)圖2)。IBS即便在最惡劣的條件下也能以高解析度和精確 度測(cè)量電池電壓、電流和溫度,并能夠在電池的整個(gè)使用壽命中準(zhǔn)確地預(yù)測(cè)電池的充電狀態(tài)(SoC)、健康狀態(tài)(SoH)和功能狀態(tài)(SoF)。這些參數(shù)定期 或根據(jù)要求通過(guò)一個(gè)獲得汽車行業(yè)認(rèn)證的車載網(wǎng)絡(luò)傳送至BCM。
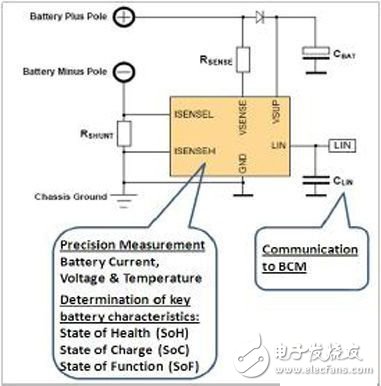
圖2:鉛酸電池的典型智能電池傳感器
Battery Plus Pole:電池正極;Battery Minus Pole:電池負(fù)極;Chassis ground:底盤接地;Precision measurement battery current, voltage & temperature:精確測(cè)量電池電流、電壓和溫度;Determination of key battery characteristics: state of health (soh) state of charge (soc) state of function (sof):確定主要電池特性:健康狀態(tài)(SoH)、充電狀態(tài)(SoC)和功能狀態(tài)(SoF);Communication to bcm:與BCM通信
除上述功能和參數(shù)功能外,對(duì)IBS提出的其他主要要求包括低功耗、能夠在惡劣的汽車行駛環(huán)境中(即EMC和ESD)工作、進(jìn)行汽車OEM 廠商驗(yàn)收的車載通信接口一致性測(cè)試(即,LIN)、滿足汽車等級(jí)測(cè)試限制(針對(duì)被測(cè)參數(shù)的六西格瑪限制),另外還需符合AEC-Q100標(biāo)準(zhǔn)要求。
飛思卡爾宣布推出一款完全集成的LIN電池監(jiān)控設(shè)備,它基于Freescale S12 MCU技術(shù)[2],能夠滿足上述所有參數(shù)要求。該設(shè)備包括三個(gè)獨(dú)立的測(cè)量通道:通過(guò)外部分流電阻測(cè)量電流;通過(guò)直接安裝在電池負(fù)極的串聯(lián)電阻測(cè)量電池電 壓;通過(guò)集成傳感器測(cè)量溫度。采用一個(gè)集成LIN 2.1接口直接將傳感器連接至LIN總線,無(wú)需其他部件。飛思卡爾IBS完全符合汽車行業(yè)的AEC-Q100標(biāo)準(zhǔn)要求。
在下面幾章里,我們將為您介紹使用飛思卡爾IBS的BMS的實(shí)施方案,以及如何通過(guò)使用IBS的硬件特性和定點(diǎn)算法來(lái)實(shí)現(xiàn)BMS的高效運(yùn)行。
3) 電池監(jiān)控
正如第2)部分中所提到的,IBS的主要用途是監(jiān)控電池狀態(tài),并根據(jù)需要將狀態(tài)變量傳送至BCM或其他ECU。電池監(jiān)控輸入值將使用已測(cè)量的電池電流、電池電壓和溫度采樣值。電池監(jiān)控輸出值是SoC、SoH和SoF值。
3.1) 充電狀態(tài)
(SoC) SoC的定義非常直觀,通常以百分?jǐn)?shù)的形式表示。完全充電的電池SoC為100%,完全放電的電池SoC為0%。SoC值隨電池的充電和放電改變。
該值通過(guò)公式(1)計(jì)算,其中Cr代表電池的剩余(可放電)電量,Ca代表電池的可用總電量:

但是,有一個(gè)問(wèn)題是可用電池電量常常與電池的標(biāo)稱容量(通常標(biāo)注在電池外殼的標(biāo)簽上)不同。對(duì)于一個(gè)新電池,它可能比標(biāo)稱容量稍高,對(duì)于已經(jīng)使用一段的電池來(lái)說(shuō),可用電量會(huì)降低。另一個(gè)問(wèn)題是,實(shí)際可用電量很難根據(jù)IBS的輸入值來(lái)確定。
因此,SoC通常額定為標(biāo)稱容量Cn,它具有多項(xiàng)優(yōu)勢(shì):
●特定SoC的電池的可用總充電電量是已知的,包括舊電池。
●測(cè)試Cn點(diǎn)的電流(I=Cn/20h)和溫度(27℃)是可確定的
庫(kù)侖計(jì)數(shù)算法是跟蹤SoC快速變化的最佳算法。它基于流進(jìn)和流出電池集成電流并根據(jù)實(shí)際情況采納經(jīng)過(guò)計(jì)算的SoC。公式(2)用于SoC計(jì)算,其中Q(t0)表示電池的初始電量,α表示效能因子,i(t)表示電流(正向或負(fù)向),Cn表示電池的標(biāo)稱容量。

除了α因子以外,公式中的參數(shù)都非常直觀。這是一個(gè)用來(lái)描述效能的因子,也稱為Peukert定律[3] [4]。它表述了在不同放電率的情況下鉛酸電池的電量。當(dāng)放電率提高時(shí),電池的可用電量將降低。另外一個(gè)影響可用電量的參數(shù)是溫度。溫度越高,可用電量也 就越高。兩種效能都使用α描述,因此α值需要采用一個(gè)2維數(shù)組(溫度和放電率)。根據(jù)測(cè)量到的溫度和放電率,相應(yīng)的值分別用于每一個(gè)集成步驟。α值在很大 程度上取決于電池的設(shè)計(jì)和化學(xué)組成,通常情況下即使是同一家制造商的不同型號(hào)的電池該值也會(huì)有所不同。他們通常已經(jīng)在實(shí)驗(yàn)室里通過(guò)充電和放電測(cè)試。
雖然Peukert定律只適用于放電的情況,但也有一個(gè)與α值類似的效能因子用于充電周期。除了溫度和充電率以外,實(shí)際的SoC 也需要考慮在內(nèi),因?yàn)樵诟逽oC情況下的充電效能小于中等SoC情況下的充電效能。
因?yàn)榫C合了電流值和α值,因此在更改電池條件時(shí)產(chǎn)生的誤差、以及電流測(cè)量和量化誤差隨著時(shí)間的增加變得越來(lái)越多。因此,參數(shù)Q(t0) (電流集成的起始點(diǎn))通常通過(guò)一種能夠提供更高精度的不同方法獲得:OCV 方法。OCV是當(dāng)沒(méi)有電氣元件從電池中獲取電流時(shí)電池兩極之間的電壓。
鉛酸電池顯示OCV和SoC之間有良好的線性關(guān)系。因此,通過(guò)測(cè)量OCV,SoC可以直接計(jì)算出來(lái)。OCV和SoC之間的確切因子必須表征出來(lái)。
這種方法的唯一缺陷是,OCV只能在汽車停好以后測(cè)量,例如(幾乎)所有電氣元件都關(guān)閉后,或者在汽車熄火后經(jīng)過(guò)數(shù)十分鐘甚至小時(shí)后再測(cè)量。
因此,OCV方法常常用于校準(zhǔn)庫(kù)侖計(jì)數(shù),庫(kù)侖計(jì)數(shù)算法連續(xù)運(yùn)行。這種組合方式提供了一個(gè)良好的SoC計(jì)算方法,并且可以在一個(gè)較長(zhǎng)的停車時(shí)間內(nèi),用自放電率糾正SoC來(lái)使計(jì)算結(jié)果更加精確。
3.2) 健康狀態(tài)(SoH)
鉛酸電池的各種老化效應(yīng)會(huì)對(duì)電池使用造成不同的影響[5]。由于很難通過(guò)IBS逐個(gè)對(duì)這些老化效應(yīng)進(jìn)行監(jiān)測(cè)和量化,因此SoH的額定值通 常不直接與這些老化效應(yīng)掛鉤。相反,會(huì)隨著電池的使用時(shí)間增長(zhǎng),容量額定值降低,這是老化的主要結(jié)果。與電池老化有關(guān)的另一個(gè)非常重要的參數(shù)是啟動(dòng)性能; 但是它通常表述為啟動(dòng)能力的功能狀態(tài)(SoF) (請(qǐng)參見(jiàn)第3.3節(jié))。
因此,SoH通過(guò)公式(3)來(lái)估計(jì),其中Caged代表老化的電池容量,Cn代表在每個(gè)SoC計(jì)算中引用的標(biāo)稱容量。

因?yàn)镃n 是已知的,因此計(jì)算SoH的關(guān)鍵任務(wù)是找到Caged。一種可能的方法是在電池的整個(gè)使用壽命內(nèi)跟蹤可以到達(dá)的最大電量(或SoC)。如果在隨后進(jìn)行的若 干次完全充電后,電池的最大電量水平低于以前計(jì)算的老化容量,則表示老化容量變小。相應(yīng)的,Caged 和SoH必須根據(jù)庫(kù)侖計(jì)數(shù)和OCV方法確定的容量進(jìn)行調(diào)整。完全充電狀態(tài)可以在充電電流降低至特定門限值以下時(shí)監(jiān)測(cè)。
確定SoH的另外一個(gè)方法是跟蹤充電和放電周期,以電池制造商提供的周期穩(wěn)定點(diǎn)取其額定值。通常,制造商會(huì)確保在指定溫度和深度下的充電/放電周期總量,例如,在27攝氏度、25%放電深度時(shí)500個(gè)周期。通過(guò)將所有周期額定為上述數(shù)量,并應(yīng)用溫度和充電狀態(tài)校正因子,可支持跟蹤上面提到的Caged值。這些校正因子必須通過(guò)表征電池的參數(shù)來(lái)確定。但是,這兩種方法通常還會(huì)與其他專用算法結(jié)合使用,這些算法考慮了電池使用壽命中的多個(gè)電池參數(shù)。
在實(shí)驗(yàn)室中進(jìn)行大量的電池參數(shù)表征可確定這些電池參數(shù),通常只適用于一個(gè)特定的電池型號(hào)。
3.3) 功能狀態(tài)(SoF)
對(duì)鉛酸電池來(lái)說(shuō),發(fā)動(dòng)汽車引擎即便不是最重要的功能,也是非常重要的功能。因此,BMS一個(gè)非常重要的任務(wù)是預(yù)測(cè)在實(shí)際電量條件下是否能夠啟動(dòng)汽車。啟動(dòng)預(yù)測(cè)通過(guò)SoF參數(shù)表示。
除了過(guò)去“傳統(tǒng)的”停車后再啟動(dòng),通過(guò)在微型混合動(dòng)力汽車中引入啟動(dòng)-停止系統(tǒng),啟動(dòng)預(yù)測(cè)功能正變得越來(lái)越重要。BMS必須與BCM通信并決定是否可以在引擎關(guān)閉后再次啟動(dòng),以及是否可以安全地進(jìn)入停止模式。
獲取SoF參數(shù)的一個(gè)非常好的途徑是通過(guò)分析最近的引擎啟動(dòng)情況、剩余電量(作為SoC和SoH的函數(shù))和實(shí)際溫度。在啟動(dòng)期間,電池的 內(nèi)部電阻(Ri)需要被記錄下來(lái)(通過(guò)電壓降和電流來(lái)計(jì)算)。因?yàn)镽i在電池的使用壽命中是相對(duì)一致的、并且只是在電池使用壽命結(jié)束前顯著升高,因此Ri 平均值需要在一個(gè)特定的門限值以下,以確保安全啟動(dòng)。在啟動(dòng)階段老化電池的另一個(gè)影響是,從電壓和電流采樣中計(jì)算出的Ri值會(huì)表現(xiàn)出非線性的趨勢(shì)[5], 即,對(duì)于同等電壓樣本會(huì)有不同的電流值。而對(duì)于新電池來(lái)說(shuō),Ri是線性的。請(qǐng)參見(jiàn)圖3和圖4了解啟動(dòng)過(guò)程中常見(jiàn)的電壓和電流趨勢(shì)。
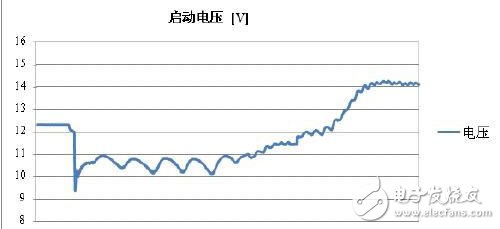
圖3:?jiǎn)?dòng)電壓趨勢(shì)
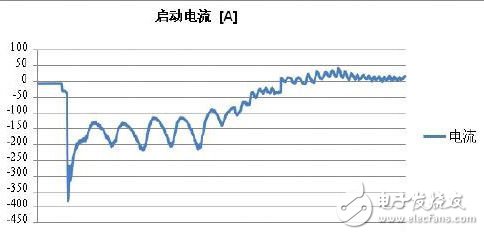
圖4:?jiǎn)?dòng)電流趨勢(shì)
綜合Ri(通過(guò)電壓降和電流來(lái)計(jì)算)、電池剩余電量和實(shí)際溫度,可以很好地指示啟動(dòng)能力。同樣,這些門限值也必須通過(guò)電池參數(shù)表征來(lái)確定。
為了使用必要的準(zhǔn)確值來(lái)確定Ri的線性或非線性行為,所有在啟動(dòng)階段取樣的電壓和電流值都需要使用一個(gè)線性過(guò)濾器來(lái)過(guò)濾,優(yōu)選采用帶通過(guò)濾器。
4) BMS在硬件和軟件中的高效實(shí)施
電氣能效是新型汽車一個(gè)最重要的特性,由BMS提供支持。除了管理一些節(jié)電功能外,BMS還需要具有高能效,因?yàn)樗鞘冀K開啟的系統(tǒng)之一,當(dāng)發(fā)電機(jī)不工作時(shí)需要通過(guò)鉛酸電池供電。為了滿足這一要求,IBS的能耗必須盡可能低。
為了實(shí)現(xiàn)這一目標(biāo),飛思卡爾的IBS實(shí)施采用兩種低功耗模型,其中CPU和其他不需要開啟的硬件(HW)模塊都可以關(guān)閉。為了降低正常運(yùn) 行模式中的能耗,并減少客戶的軟件(SW)開發(fā)工作,添加了額外的硬件模塊以降低軟件復(fù)雜性。為了實(shí)現(xiàn)這一目標(biāo),可以使用規(guī)模更小、功耗更低同時(shí)也更為經(jīng) 濟(jì)高效的16位微控制器。另外一種降低軟件復(fù)雜性的方法是在整個(gè)使用壽命期間確保產(chǎn)品參數(shù),并將工廠調(diào)校值存儲(chǔ)在非易失性存儲(chǔ)器(NVM)中。作為產(chǎn)品下 線測(cè)試的一部分,這些調(diào)教值針對(duì)每個(gè)芯片逐個(gè)進(jìn)行參數(shù)表征描述,并相應(yīng)地存儲(chǔ)。因此,在軟件中無(wú)需使用復(fù)雜的校準(zhǔn)算法。
除了在硬件中實(shí)施的這三種技術(shù)以外,本章還介紹了電池監(jiān)控算法的高效軟件實(shí)施方案(請(qǐng)參見(jiàn)圖3)。
4.1) 低功耗模式
實(shí)施低功耗模式是一種非常好的降低功耗的方法。實(shí)現(xiàn)方法是,在不需要SoC部件(尤其是CPU)時(shí)將其關(guān)閉、并僅在需要時(shí)更改為正常模式(例如,激活所有硬件模塊)。正如前面所提到的,共有兩種低功耗模型,其不同之處僅在于CPU被喚醒后使用的程序進(jìn)入點(diǎn)。
但是,在低功耗(即沒(méi)有軟件交互)模式下,也需要監(jiān)控電池狀態(tài)。首先,需要跟蹤電流,通過(guò)庫(kù)侖計(jì)數(shù)方法計(jì)算出SoC。相應(yīng)地,可以支持低功耗模式下的電流測(cè)量(即,庫(kù)侖計(jì)數(shù))和電流采樣值的自動(dòng)求和。
IBS必須能夠?qū)﹄姵睾推嚨臓顟B(tài)更改作出反應(yīng),即電池傳感器必須在發(fā)生各種事件時(shí)喚醒。相應(yīng)地,也需要測(cè)量低功耗模式期間的電流和溫 度。電流變化通常表明汽車狀態(tài)發(fā)生變化(電氣元件打開或關(guān)閉),而溫度改變時(shí)有時(shí)需要重新校準(zhǔn)測(cè)量通道參數(shù)(請(qǐng)參見(jiàn)4.3)。可以配置電流和溫度采樣值的 門限值,如果超出門限值則觸發(fā)喚醒。還可以使用自動(dòng)庫(kù)侖計(jì)數(shù)器門限值喚醒機(jī)制。
除了那些針對(duì)被測(cè)量參數(shù)的喚醒事件以外,還可實(shí)施其他喚醒機(jī)制,允許BCM或汽車中的其他電氣設(shè)備喚醒IBS(通過(guò)LIN消息或直接導(dǎo)線連接),還有定時(shí)喚醒機(jī)制。
上述低功耗模式和喚醒機(jī)制的實(shí)施允許IBS在大多數(shù)時(shí)間里都運(yùn)行在低功耗模式下(通常約為70%),包括引擎運(yùn)行時(shí)。在正常運(yùn)行模式期間,SoC、SoH和SoF參數(shù)將被重新計(jì)算。
4.2) 將軟件任務(wù)遷移至硬件模塊
實(shí)施專用硬件模塊來(lái)承擔(dān)軟件中的任務(wù)是降低軟件復(fù)雜性和節(jié)省電力的一種有效方式。在將此類硬件模塊用于電池監(jiān)控算法以前,可以非常高效地 將其用于電壓、電流和溫度測(cè)量樣本的預(yù)處理。這一點(diǎn)非常必要,因?yàn)槠嚨碾娋€中常常會(huì)出現(xiàn)干擾,并且IBS的采樣值的測(cè)量準(zhǔn)確度要求非常高。
帶有抽取和抗干擾過(guò)濾器的高精度16位sigma-delta ADC非常適合這種應(yīng)用,因?yàn)榕c其他ADC技術(shù)相比它具有高測(cè)量精確度。結(jié)合誤差補(bǔ)償功能(請(qǐng)參見(jiàn)4.3),已能夠提供非常好的精確度。但是,在信號(hào)處理 序列之后常常需要對(duì)樣本再次過(guò)濾。這樣做的原因是可以去除汽車中其他電氣設(shè)備中的噪音,因此需要自由轉(zhuǎn)換過(guò)濾器的頻率特征。另外一個(gè)原因是,被觀察的特定 電池參數(shù)作為電池監(jiān)控的一部分,與激勵(lì)頻率(由電池的化學(xué)組成決定)緊密聯(lián)系在一起。例如,Ri就是這種情況。一個(gè)可以編程的線性過(guò)濾器可以滿足所有這些 要求:過(guò)濾器系數(shù)可以通過(guò)寄存器傳輸?shù)接布^(guò)濾器模塊。這些寄存器可以編程一次,然后在軟件中不再需要完成過(guò)濾任務(wù)。
電流測(cè)量結(jié)果面臨一個(gè)挑戰(zhàn),因?yàn)樾枰槍?duì)微小電流進(jìn)行高度精確的測(cè)量,同時(shí)還必須支持大范圍測(cè)量。所要求的精確度要高于10mA,這意味 著在100 μOhm的分流上出現(xiàn)1μV的壓降;在汽車啟動(dòng)過(guò)程中,會(huì)出現(xiàn)1000A和更高的電流。為了支持上述兩種需要同時(shí)避免出現(xiàn)從軟件執(zhí)行手動(dòng)測(cè)量重新配置,需 要實(shí)施一個(gè)自動(dòng)增益放大器。一個(gè)可選擇的增益因子將調(diào)節(jié)輸入信號(hào),使其經(jīng)過(guò)優(yōu)化與ADC的參考電壓匹配。增益因子的調(diào)節(jié)可以自動(dòng)完成,在整個(gè)運(yùn)行過(guò)程中, 無(wú)需對(duì)軟件進(jìn)行重新配置。為了便于測(cè)試目的,或如果存在特殊的應(yīng)用環(huán)境,也可以選擇固定增益因子。
4.3) 簡(jiǎn)化校準(zhǔn)工作
確保設(shè)備在整個(gè)使用壽命期間都保持高精確度的一個(gè)非常重要的任務(wù)是微調(diào)和校準(zhǔn)。為此,以前測(cè)試的糾正因子也可以應(yīng)用至關(guān)鍵的設(shè)備參數(shù)中。 作為產(chǎn)品線設(shè)備測(cè)試的一部分,這些因子針對(duì)不同的溫度進(jìn)行測(cè)試,并且存儲(chǔ)在IBS的NVM中。在設(shè)備啟動(dòng)時(shí),各個(gè)微調(diào)參數(shù)必須由軟件寫入至設(shè)備寄存器中。 需要微調(diào)的參數(shù)可以在電流和電壓測(cè)量序列中找到。另外,振蕩器、電壓基準(zhǔn)和LIN計(jì)時(shí)也需要被校準(zhǔn)。在運(yùn)行期間,也會(huì)需要進(jìn)行重新校準(zhǔn),例如需要定期執(zhí)行 校準(zhǔn)或在出現(xiàn)溫度急劇變化時(shí)執(zhí)行校準(zhǔn)。如果適合,不同的糾正因子必須再次寫入至各自的寄存器。
上面提到的校準(zhǔn)功能可以避免客戶針對(duì)這些參數(shù)進(jìn)行成本昂貴的產(chǎn)品下線測(cè)試。另外,通過(guò)簡(jiǎn)單地應(yīng)用參數(shù),還可以降低校準(zhǔn)的軟件復(fù)雜性。
4.4) 軟件實(shí)施方案
在3)章節(jié)中提到的電池管理算法需要處理器密集型計(jì)算和控制算法。通常,在PC上使用基于模型的模擬工具來(lái)完成這些算法的首次實(shí)施。這些 工具通常使用浮點(diǎn)數(shù)據(jù)格式。在之后的開發(fā)流程中,這些算法會(huì)導(dǎo)入到IBS上。但是,由于成本和功耗的原因,IBS所用的微控制器類上并不提供浮點(diǎn)硬件。因 此,為了實(shí)現(xiàn)適用的運(yùn)行時(shí)間,在算法中使用的數(shù)據(jù)類型必須轉(zhuǎn)換為定點(diǎn)整數(shù)格式。共有多種數(shù)據(jù)類型和內(nèi)在值范圍可用。例如,下面列出了在飛思卡爾的IBS上 提供的數(shù)據(jù)類型:

為了表示小于1的值,LSB被映射為特定的值。
該值由所需的解析度決定。通過(guò)選擇其中一個(gè)可用的數(shù)據(jù)類型,可以導(dǎo)出該變量的可用值范圍和虛擬固定小數(shù)點(diǎn)(固定點(diǎn)格式)。例如,解析度為1mV,采用標(biāo)記整數(shù)數(shù)據(jù)類型,則范圍為0至65.535伏特。
因?yàn)轱w思卡爾IBS中有一個(gè)16位S12 CPU,因此整數(shù)數(shù)據(jù)類型可提供16位精度。這意味著8位和16位變量處理起來(lái)比32位值具有更高性能。因此,一般都是首選8位和16位變量。
從上面提到的計(jì)算SoC、SoH和SoF所用的算法實(shí)施范例中可以發(fā)現(xiàn),在許多情況下,16位變量可以提供充足的值精確度和范圍。這是因 為電壓和溫度輸入值都具有16位精確度(通過(guò)使用16位ADC)。其他16位精確度就已足夠的值,包括SoC、SoH、Ri和糾正因子α(請(qǐng)參見(jiàn)第3章了 解詳細(xì)說(shuō)明)。即使采用24位精確度的電流采樣值,也可以在大多數(shù)時(shí)間里映射至16位。在類似3mA的精確度上,通過(guò)使用帶標(biāo)記的16位整數(shù)格式,可以表 示+/- 98.3 A范圍的電流值,無(wú)需針對(duì)數(shù)字格式進(jìn)行進(jìn)一步的修改。這足可以滿足汽車行駛和停止期間的要求。在啟動(dòng)過(guò)程中,電流采樣值會(huì)超過(guò)邊界,必須使用32位數(shù)據(jù)格 式。需要32位格式的參數(shù)是與電池充電有關(guān)的值(例如,庫(kù)侖計(jì)數(shù)器)。
5) 總結(jié)
本白皮書介紹了如何在使用飛思卡爾IBS的微型混合動(dòng)力汽車中有效實(shí)施BMS。討論了最先進(jìn)的電池狀態(tài)計(jì)算算法(SoC、SoH和 SoF)。從中可以了解到,在功耗方面可以采用哪些特殊的硬件特性來(lái)提供IBS的效率。另外,本文還介紹了具有自動(dòng)電池狀態(tài)監(jiān)控功能(無(wú)需軟件交互)和復(fù)雜的喚醒機(jī)制的低功耗模式的使用。結(jié)果顯示,IBS能夠在大多數(shù)時(shí)間內(nèi)處在低功耗模式中。另外,通過(guò)正確的硬件信號(hào)處理、可編程的過(guò)濾器和簡(jiǎn)化的校準(zhǔn)方 式,我們可以發(fā)現(xiàn)軟件復(fù)雜性已經(jīng)顯著降低。本文還介紹了定點(diǎn)算法原則,結(jié)果顯示,對(duì)于BMS算法中的變量來(lái)說(shuō),16位定點(diǎn)數(shù)據(jù)格式常常能夠滿足要求,只在 少數(shù)時(shí)候需要32位格式。










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論