 電子發燒友App
電子發燒友App


?
????內嵌ARM核的FPGA芯片EPXA10及其在圖像驅動和處理方面的應用
????摘要:介紹了內嵌ARM核的FPGA芯片EPXA10的主功能特點、內部結構及工作方式,通過其在圖像驅動和處理方面的應用,體現了EPX10邏輯控制實現簡單、對大量數據做簡單處理速度快以及軟件編程靈活的特點。
????關鍵詞:ARM FPGA EPXA10 圖像驅動 圖像處理
隨著亞微米技術的發展,FPGA芯片密度不斷增加,并以強大的并行計算能力和方便靈活的動態可重構性,被廣泛地應用于各個領域。但是在復雜復法的實現上,FPGA卻遠沒有32位RISC處理器靈活方便,所以在設計具有復雜算法和控制邏輯的系統時,往往需要RISC和FPGA結合使用。這樣,電路設計的難度也就相應大大增加。隨著第四代EDA開發工具的使用,特別是在IP核產業的迅猛發展下產生的SOPC技術的發展,使嵌入式RISC的通用及標準的FPGA器件呼之欲出。單片集成的RISC處理器和FPGA大大減小了硬件電路復雜性和體積,同時也降低了功耗、提高了系統可靠性。Altera公司的EPXA10芯片就是應用SOPC技術,集高密度邏輯(FPGA)、存儲器(SRAM)及嵌入式處理器(ARM)于單片可編程邏輯器件上,實現了速度與編程能力的完美結合。本文所介紹的圖像驅動和處理系統正應用了EPX10的這些特點,充分發揮了FPGA邏輯控制實現簡單、對大量數據做簡單處理速度快的優勢以及ARM軟件編程靈活的特點。
?
1 內嵌ARM核的FPGA芯片EPXA10及其主要特點
EPX10單片集成了ARM核、高密度的FPGA、存儲器及接和控制模塊,不僅簡化了ARM與FPGA之間的通訊,也使片外擴展存儲器以及和外設通訊變得相對簡單;同時通過在FPGA中嵌入各種IP核和用戶控制邏輯可以實現各種接口和控制任務。這樣的高度集成化不僅大大加快了ARM與片內各種資源的通訊速度,而且減小了硬件電路的復雜性、體積和功耗,真正實現了SOPC。
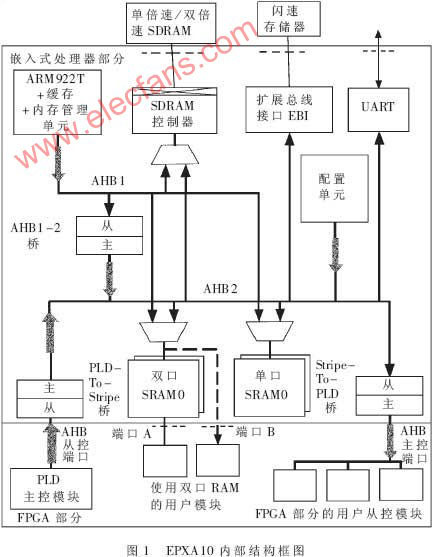
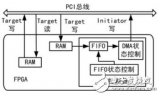
EPX10內部結構框圖如圖1所示,主要分為嵌入式處理器和FPGA兩部分。
1.1 嵌入式微處理器ARM922T
EPX10嵌入式處理器部分集成了業界領先的32位ARM處理器(ARM922T),工作頻率可達200MHz;支持32位ARMv4T指令集和16位Thumb擴展指令集;具有全性能的內存管理單元以及8K的指令緩存和8K數據緩存,以支持實時操作系統(RTOS)、C語言和匯編語言。
1.2 高密度的FPGA
EPXA10片內FPGA部分具有1000000門可編程邏輯、3MB的內置RAM和512個可供用戶使用的I/O管腳,可以通過嵌入各種IP核實現各種標準工業接口(如PCI、USB等)。
1.3 先進的存儲支持
EPXA10嵌入式處理器部分集成了256KB單口SRAM和128KB雙口SRAM;同時集成了兩個先進的存儲支持:(1)SDRAM控制器,用于控制單倍速/雙倍速不同控制進序來確定的,實現起來非常復雜。有了SDRAM控制器的支持,只需要在Altera公司提供的EDA開發軟件Quartus II中設置好SDRAM工作所需的各種參數,就可以按照直接給出指令、地址和數據的方式對SDRAM進行操作,控制器會自動將各種指令轉化成SDRAM所需的工作時序,大大降低了對SDRAM的控制難度。(2)從FPGA啟動。這種啟動方式需要將設計下載到片外E2PROM中,而且設計中可包含FPGA部分的應用。啟動時FPGA為主動,ARM處復位狀態,配置完成后,如果有對ARM的應用,則ARM解除復位,執行軟件代碼;反之,ARM一直處于復位狀態。圖3????2 EPXA10的工作方式
EPXA10嵌入式處理器部分提供了兩條32位AMBA微控制器總線AHB1、AHB2,分別用于片內各種資源的通訊,如圖1所示。基于AHB1、AHB2總線,EPXA10的工作方式大致可分為三種:(1)ARM作為AHB1總線的主控,直接訪問HAB1總線的從屬資源。包括SDRAM控制器、片上SRAM、中斷控制器等。(2)ARM作為AHB1總線的主控,通過AHB1-2橋訪問AHB2總線上的從屬資源,包括UART、EBI、SRAM、Stripe-To-PLD橋等,同時通過Stripe-To-PLD橋對FPGA進行訪問和控制。(3)FPGA通過AHB2的總線主控PLD-To-Stripe橋訪問AHB2總線上的從屬資源,包括SRAM、SDRAM控制器,UART等。
EPXA10片內集成了軟件可編程鎖相環路(PLL),為微控制器總線及SDRAM控制器提供了靈活精確的時鐘基準。
3 EPXA10在圖像驅動和處理方面的應用
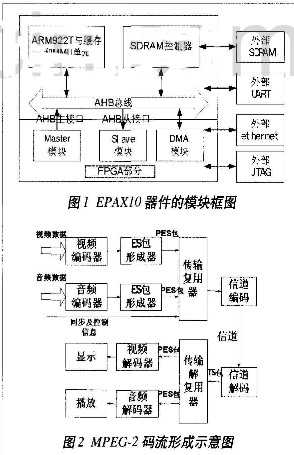
本文所述的圖像驅動和處理系統主要利用PPGA邏輯控制實現簡單、對大量數據做簡單處理速度快以及ARM軟件編程靈活的特點,系統框圖如圖2所示。在芯片FPGA部分,構造了CMOS驅動模塊,驅動CMOS圖像傳感器使之能夠采集圖像數據。然后圖像數據經數據接收模塊存入片外SDRAM中,并經串口傳入PC機,要將圖像數據在PC機中顯示成圖像,還需編寫基于CDib類的圖像顯示程序;同時將圖像數據經芯片ARM部分的圖像處理算法(本系統采用Sobel算子)處理,處理后的圖像數據才能經串口傳給PC機進行顯示。為了驗證基于ARM的圖像處理算法實現的正確性,還將這一算法在PC機中進行了實現,最后針對同一幅圖像,將兩種實現的結果進行了比較。
3.1 圖像的驅動
3.1.1 CMOS圖像傳感器的驅動
要使CMOS圖像傳感器的成像,必須設計正確的驅動時序,包括行同步、列同步、場同步及曝光時間設定等時序。利用FPGA邏輯編程簡單的特點,用硬件描述語言Verilog HDL編程,可在FPGA中實現CMOS圖像傳感器的驅動時序,該驅動時序的仿真結果如圖3所示。圖中,ld_y為行選通信號;ld_x為列選通信號;cal為場選通信號;clk_adc為內部A/D轉換器所需的時鐘;addr為行列地址線;sys_reset為曝光時間設定信號;s和r為內部放大器選通信號。
3.1.2 圖像的采集
CMOS圖像傳感器輸出的信號為數字信號(即數字圖像數據),所以圖像的采集要通過FPGA中的數據接收模塊將圖像數據保存到片外SDRAM中。數據接收模塊狀態機如圖4所示。標志Flag為1,開始采集數據。因為CMOS圖像傳感器在每個A/D轉換時鐘周期輸出一個數據(如圖3所示),接收模塊也相應地設計成一個時鐘接收周期接收一個數據(Burst狀態),這樣就發揮了FPGA對大量數據處理速度快的優勢。
3.1.3 圖像的顯示
ARM將SDRAM中的圖像數據經串口傳給計算機,在計算機中用VC++語言編寫串口協議和圖像顯示程序,將CMOS圖像傳感器采集到圖像顯示在屏幕上,以便于監測驗證。
3.2 圖像的處理
本系統采用的圖像處理算法基于Sobel邊緣檢測算子。圖像的邊緣是由灰度不連續性所反映的,是的最基本信息。邊緣檢測算子檢查每個像素的的領域并對灰度變化率進行量化,也包括方向的確定,大多數使用基于方向導數掩模求卷積的方法。就sobel算子而言,如圖55所示,采用了兩個3×3卷積核形成邊緣算子模板,緊鄰中心像素的像素有4個,和中心像素成斜對角的像素也有4個,距離中心素近的模板值的系數為2,成斜對角的比較遠,所以其系數為1,該系數反映了這樣一點:領域對當前像素的灰度梯度的影響程度越近影響越大,越遠影響越小。圖像中的每個點都用這兩個核做卷積,一個核對垂直邊緣響應最大,而另一個核對水平邊緣響應最大,兩個卷積的最大值作為該點的輸出位,反映了當前位置灰度梯度(圖像邊緣)的主要方向和大小。運算結果反饋了一幅邊緣幅度圖像。
因為拍攝的圖像邊1024×1024,采用的Sobel算子為3×3模板,所以圖像周邊的一圈像素(第1行、第1024行、第1列、第1024列)保持原灰度值。在圖像的第2行2列到1023行1023列的范圍內,用圖5所示的算子模板進行掃描計算,即當前像素和與當前像素相鄰的8個像素,分別與模板中位置相應的8個系數相乘,累加這9個乘積結果,就得到針對某一方向的灰度梯度。比較兩個方向的計算結果,取量大者作為當前位置的灰度梯度。圖7為圖6經過Sobel算子進行邊緣提取后得到的圖像。該算法在ARM中是基于C語言實現的,體現了ARM軟件編程靈活的特點。
?3.3 試驗結果
圖6是成功驅動CMOS圖像傳感器后拍攝的景物圖像,可見圖像非常清晰。本文介別針對Soble算子進行了基于PC機和基于ARM的實現,圖7為圖6經過ARM中的Sobel算子的邊緣提取結果,圖8為圖6經過PC機中Sobel算子的邊緣提取結果,圖9為圖7和圖8逐像素的比較結果。可見兩種實現方法得到的結果完全一致,說明了基于ARM的Sobel算子的實現是正確的。
上述驅動和處理系統如果僅用FPGA來實現,算法部分的實現會比較復雜;如果僅用ARM來實現,驅動時序的設計也會非常困難。面采用內嵌ARM核的FPGA芯片EPXA10,單片就實現了上述系統,大大減小了設計的難度和電路的復雜性,同時也減小了硬件電路的體積和功耗,在系統小型化方面有著獨特的優勢。由于EPXA10集成了先進的ARM922T處理器器以及高密度的FPGA,所以在不增加體積和改進硬件電路的情況下,可以實現更加復雜的圖像處理算法和硬件控制邏輯設計,具有很強的系統擴展潛力。這種嵌入式方案必將成為集成電路的發展趨勢,將會在未來較短的時間里得到快速的發展。
?
[本文已被作者于2005-4-16 9:26:43編輯過]
?












 工商網監
工商網監
評論