 電子發(fā)燒友App
電子發(fā)燒友App


CAN基礎(chǔ)知識(shí)
什么是CAN
CAN,全稱(chēng)為“Controller Area Network”,即控制器局域網(wǎng),是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線(xiàn)之一。最初,CAN被設(shè)計(jì)作為汽車(chē)環(huán)境中的微控制器通訊,在車(chē)載各電子控制裝置ECU之間交換信息,形成汽車(chē)電子控制網(wǎng)絡(luò)。比如:發(fā)動(dòng)機(jī)管理系統(tǒng)、變速箱控制器、儀表裝備、電子主干系統(tǒng)中,均嵌入CAN控制裝置。
一個(gè)由CAN 總線(xiàn)構(gòu)成的單一網(wǎng)絡(luò)中,理論上可以?huà)旖訜o(wú)數(shù)個(gè)節(jié)點(diǎn)。實(shí)際應(yīng)用中,節(jié)點(diǎn)數(shù)目受網(wǎng)絡(luò)硬件的電氣特性所限制。例如,當(dāng)使用Philips P82C250作為CAN收發(fā)器時(shí),同一網(wǎng)絡(luò)中允許掛接110個(gè)節(jié)點(diǎn)。CAN 可提供高達(dá)1Mbit/s的數(shù)據(jù)傳輸速率,這使實(shí)時(shí)控制變得非常容易。另外,硬件的錯(cuò)誤檢定特性也增強(qiáng)了CAN的抗電磁干擾能力。
CAN 是怎樣發(fā)展起來(lái)的?
CAN最初出現(xiàn)在80年代末的汽車(chē)工業(yè)中,由德國(guó)Bosch公司最先提出。當(dāng)時(shí),由于消費(fèi)者對(duì)于汽車(chē)功能的要求越來(lái)越多,而這些功能的實(shí)現(xiàn)大多是基于電子操作的,這就使得電子裝置之間的通訊越來(lái)越復(fù)雜,同時(shí)意味著需要更多的連接信號(hào)線(xiàn)。提出CAN總線(xiàn)的最初動(dòng)機(jī)就是為了解決現(xiàn)代汽車(chē)中龐大的電子控制裝置之間的通訊,減少不斷增加的信號(hào)線(xiàn)。于是,他們?cè)O(shè)計(jì)了一個(gè)單一的網(wǎng)絡(luò)總線(xiàn),所有的外圍器件可以被掛接在該總線(xiàn)上。1993年,CAN 已成為國(guó)際標(biāo)準(zhǔn)ISO11898(高速應(yīng)用)和ISO11519(低速應(yīng)用)。
CAN是一種多主方式的串行通訊總線(xiàn),基本設(shè)計(jì)規(guī)范要求有高的位速率,高抗電磁干擾性,而且能夠檢測(cè)出產(chǎn)生的任何錯(cuò)誤。當(dāng)信號(hào)傳輸距離達(dá)到10Km時(shí),CAN 仍可提供高達(dá)50Kbit/s的數(shù)據(jù)傳輸速率。
由于CAN總線(xiàn)具有很高的實(shí)時(shí)性能,因此,CAN已經(jīng)在汽車(chē)工業(yè)、航空工業(yè)、工業(yè)控制、安全防護(hù)等領(lǐng)域中得到了廣泛應(yīng)用。
CAN是怎樣工作的?
CAN通訊協(xié)議主要描述設(shè)備之間的信息傳遞方式。CAN層的定義與開(kāi)放系統(tǒng)互連模型(OSI)一致。每一層與另一設(shè)備上相同的那一層通訊。實(shí)際的通訊發(fā)生在每一設(shè)備上相鄰的兩層,而設(shè)備只通過(guò)模型物理層的物理介質(zhì)互連。CAN的規(guī)范定義了模型的最下面兩層:數(shù)據(jù)鏈路層和物理層。下表中展示了OSI開(kāi)放式互連模型的各層。應(yīng)用層協(xié)議可以由CAN用戶(hù)定義成適合特別工業(yè)領(lǐng)域的任何方案。已在工業(yè)控制和制造業(yè)領(lǐng)域得到廣泛應(yīng)用的標(biāo)準(zhǔn)是DeviceNet,這是為PLC和智能傳感器設(shè)計(jì)的。在汽車(chē)工業(yè),許多制造商都應(yīng)用他們自己的標(biāo)準(zhǔn)。
表1 OSI開(kāi)放系統(tǒng)互連模型
7 應(yīng)用層 最高層。用戶(hù)、軟件、網(wǎng)絡(luò)終端等之間用來(lái)進(jìn)行信息交換。如:DeviceNet
6 表示層 將兩個(gè)應(yīng)用不同數(shù)據(jù)格式的系統(tǒng)信息轉(zhuǎn)化為能共同理解的格式
5 會(huì)話(huà)層 依靠低層的通信功能來(lái)進(jìn)行數(shù)據(jù)的有效傳遞。
4 傳輸層 兩通訊節(jié)點(diǎn)之間數(shù)據(jù)傳輸控制。操作如:數(shù)據(jù)重發(fā),數(shù)據(jù)錯(cuò)誤修復(fù)
3 網(wǎng)絡(luò)層 規(guī)定了網(wǎng)絡(luò)連接的建立、維持和拆除的協(xié)議。如:路由和尋址
2 數(shù)據(jù)鏈路層 規(guī)定了在介質(zhì)上傳輸?shù)臄?shù)據(jù)位的排列和組織。如:數(shù)據(jù)校驗(yàn)和幀結(jié)構(gòu)
1 物理層 規(guī)定通訊介質(zhì)的物理特性。如:電氣特性和信號(hào)交換的解釋
CAN能夠使用多種物理介質(zhì),例如雙絞線(xiàn)、光纖等。最常用的就是雙絞線(xiàn)。信號(hào)使用差分電壓傳送,兩條信號(hào)線(xiàn)被稱(chēng)為“CAN_H”和“CAN_L”,靜態(tài)時(shí)均是2.5V左右,此時(shí)狀態(tài)表示為邏輯“1”,也可以叫做“隱性”。用CAN_H比CAN_L高表示邏輯“0”,稱(chēng)為“顯形”,此時(shí),通常電壓值為:CAN_H = 3.5V 和CAN_L = 1.5V 。
CAN 有哪些特性?
CAN具有十分優(yōu)越的特點(diǎn),使人們樂(lè)于選擇。這些特性包括:
低成本
極高的總線(xiàn)利用率
很遠(yuǎn)的數(shù)據(jù)傳輸距離(長(zhǎng)達(dá)10Km)
高速的數(shù)據(jù)傳輸速率(高達(dá)1Mbit/s)
可根據(jù)報(bào)文的ID決定接收或屏蔽該報(bào)文
可靠的錯(cuò)誤處理和檢錯(cuò)機(jī)制
發(fā)送的信息遭到破壞后,可自動(dòng)重發(fā)
節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重的情況下具有自動(dòng)退出總線(xiàn)的功能
報(bào)文不包含源地址或目標(biāo)地址,僅用標(biāo)志符來(lái)指示功能信息、優(yōu)先級(jí)信息
Philips制造的CAN芯片有哪些?
表2 CAN芯片一覽表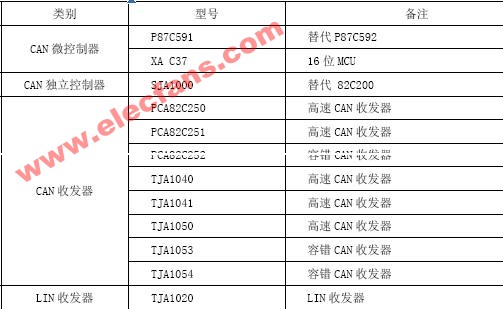
什么是CSMA/CD ?
CSMA/CD是“載波偵聽(tīng)多路訪問(wèn)/沖突檢測(cè)”(Carrier Sense Multiple Access with Collision Detect)的縮寫(xiě)。
利用CSMA訪問(wèn)總線(xiàn),可對(duì)總線(xiàn)上信號(hào)進(jìn)行檢測(cè),只有當(dāng)總線(xiàn)處于空閑狀態(tài)時(shí),才允許發(fā)送。利用這種方法,可以允許多個(gè)節(jié)點(diǎn)掛接到同一網(wǎng)絡(luò)上。當(dāng)檢測(cè)到一個(gè)沖突位時(shí),所有節(jié)點(diǎn)重新回到‘監(jiān)聽(tīng)’總線(xiàn)狀態(tài),直到該沖突時(shí)間過(guò)后,才開(kāi)始發(fā)送。在總線(xiàn)超載的情況下,這種技術(shù)可能會(huì)造成發(fā)送信號(hào)經(jīng)過(guò)許多延遲。為了避免發(fā)送時(shí)延,可利用CSMA/CD方式訪問(wèn)總線(xiàn)。當(dāng)總線(xiàn)上有兩個(gè)節(jié)點(diǎn)同時(shí)進(jìn)行發(fā)送時(shí),必須通過(guò)“無(wú)損的逐位仲裁”方法來(lái)使有最高優(yōu)先權(quán)的的報(bào)文優(yōu)先發(fā)送。在CAN總線(xiàn)上發(fā)送的每一條報(bào)文都具有唯一的一個(gè)11位或29位數(shù)字的ID。CAN總線(xiàn)狀態(tài)取決于二進(jìn)制數(shù)‘0’而不是‘1’,所以ID號(hào)越小,則該報(bào)文擁有越高的優(yōu)先權(quán)。因此一個(gè)為全‘0’標(biāo)志符的報(bào)文具有總線(xiàn)上的最高級(jí)優(yōu)先權(quán)。可用另外的方法來(lái)解釋?zhuān)涸谙_突的位置,第一個(gè)節(jié)點(diǎn)發(fā)送0而另外的節(jié)點(diǎn)發(fā)送1,那么發(fā)送0的節(jié)點(diǎn)將取得總線(xiàn)的控制權(quán),并且能夠成功的發(fā)送出它的信息。
CAN的高層協(xié)議
CAN的高層協(xié)議(也可理解為應(yīng)用層協(xié)議)是一種在現(xiàn)有的底層協(xié)議(物理層和數(shù)據(jù)鏈路層)之上實(shí)現(xiàn)的協(xié)議。高層協(xié)議是在CAN規(guī)范的基礎(chǔ)上發(fā)展起來(lái)的應(yīng)用層。許多系統(tǒng)(像汽車(chē)工業(yè))中,可以特別制定一個(gè)合適的應(yīng)用層,但對(duì)于許多的行業(yè)來(lái)說(shuō),這種方法是不經(jīng)濟(jì)的。一些組織已經(jīng)研究并開(kāi)放了應(yīng)用層標(biāo)準(zhǔn),以使系統(tǒng)的綜合應(yīng)用變得十分容易。
一些可使用的CAN高層協(xié)議有:
制定組織 主要高層協(xié)議
CiA CAL協(xié)議
CiA CANOpen協(xié)議
ODVA DeviceNet 協(xié)議
Honeywell SDS 協(xié)議
Kvaser CANKingdom協(xié)議
什么是標(biāo)準(zhǔn)格式CAN和擴(kuò)展格式CAN?
標(biāo)準(zhǔn)CAN的標(biāo)志符長(zhǎng)度是11位,而擴(kuò)展格式CAN的標(biāo)志符長(zhǎng)度可達(dá)29位。CAN 協(xié)議的2.0A版本規(guī)定CAN控制器必須有一個(gè)11位的標(biāo)志符。同時(shí),在2.0B版本中規(guī)定,CAN控制器的標(biāo)志符長(zhǎng)度可以是11位或29位。遵循CAN2.0B協(xié)議的CAN控制器可以發(fā)送和接收11位標(biāo)識(shí)符的標(biāo)準(zhǔn)格式報(bào)文或29位標(biāo)識(shí)符的擴(kuò)展格式報(bào)文。如果禁止CAN2.0B,則CAN 控制器只能發(fā)送和接收11位標(biāo)識(shí)符的標(biāo)準(zhǔn)格式報(bào)文,而忽略擴(kuò)展格式的報(bào)文結(jié)構(gòu),但不會(huì)出現(xiàn)錯(cuò)誤。目前,Philips公司主要推廣的CAN獨(dú)立控制器均支持CAN2.0B協(xié)議,即支持29位標(biāo)識(shí)符的擴(kuò)展格式報(bào)文結(jié)構(gòu)。














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論