六點(diǎn)示教法包括六點(diǎn)(XY)示教法、和六點(diǎn)(XZ)示教法。 六點(diǎn)(XZ)示教法中,取一個(gè)方向原點(diǎn)、一個(gè)與所需工具坐標(biāo)系平行的X軸方向點(diǎn)、一個(gè)XZ平面上的點(diǎn)。此時(shí),通過(guò)笛卡爾點(diǎn)動(dòng)或工具點(diǎn)動(dòng)進(jìn)行示教,以使工具的傾斜保持不變。
2023-08-08 10:58:59 464
464 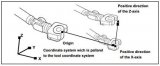
基于三維模型的視覺(jué)定位通過(guò)在查詢圖像和三維模型間建立 2D-3D 對(duì)應(yīng)關(guān)系,估計(jì)相機(jī)六自由度的位姿。傳統(tǒng)的視覺(jué)定位方法通常采用人工設(shè)計(jì)的局部特征,如 SIFT,來(lái)實(shí)現(xiàn) 2D-3D 匹配,并結(jié)合圖像檢索技術(shù),將匹配范圍限制在查詢圖像的可見(jiàn)區(qū)域,以適應(yīng)大規(guī)模場(chǎng)景的需求。
2023-04-20 10:07:05572 離心機(jī)是應(yīng)用離心力分離液體中的混合物的設(shè)備,它通過(guò)使物體圍繞固定軸旋轉(zhuǎn)運(yùn)動(dòng),從而分離不同密度的液體或液體與固體。離心機(jī)是相對(duì)簡(jiǎn)單的儀器,但維護(hù)起來(lái)卻很麻煩。大多數(shù)與離心機(jī)有關(guān)的故障都是由于用戶的錯(cuò)誤操作而造成的,許多機(jī)器也因錯(cuò)誤操作而有所損害。因此,了解我們?cè)陔x心過(guò)程中需要遵守或者所做的事情,避免損壞儀器和保持離心機(jī)在實(shí)驗(yàn)室中的長(zhǎng)久保存,是非常重要的。01平
2023-03-30 13:56:52425 
、倉(cāng)儲(chǔ)自動(dòng)化、汽車(chē)生產(chǎn)中。 AGV小車(chē)主要有電磁感應(yīng)、超聲檢測(cè)、光學(xué)檢測(cè)等導(dǎo)航方式,但都有著各自的缺陷不足,受周?chē)h(huán)境影響大,站點(diǎn)定位不夠精準(zhǔn)。而科智立RFID作為自動(dòng)識(shí)別技術(shù)之一,具有無(wú)障礙識(shí)別、耐環(huán)境性強(qiáng)、抗干擾能力
2023-03-29 16:08:42272 
離心機(jī)是應(yīng)用離心力分離液體中的混合物的設(shè)備,它通過(guò)使物體圍繞固定軸旋轉(zhuǎn)運(yùn)動(dòng),從而分離不同密度的液體或液體與固體。
2023-03-17 17:13:32427 
紅點(diǎn)定位與某知名叉車(chē)品牌經(jīng)過(guò)三年聯(lián)合開(kāi)發(fā)和測(cè)試,成功將定位技術(shù)集成至車(chē)輛安全控制系統(tǒng),并實(shí)現(xiàn)了集成定位模組車(chē)載標(biāo)簽的量產(chǎn)及設(shè)備的前裝。
2023-01-12 14:21:47986 端子有哪六點(diǎn)?
1.功率
根據(jù)負(fù)荷電流和電壓的大小,選擇相應(yīng)等級(jí)和間距的端子。
2.空間
在狹小的空間內(nèi),只能選擇相對(duì)較小的端子,固定方式為導(dǎo)軌式。端子本身的尺寸加上導(dǎo)軌的尺寸會(huì)大于布線空間的尺寸,所以只能選擇其他方法固定。
2023-01-11 16:14:14884 摘 要:針對(duì)當(dāng)前夏比擺錘沖擊試驗(yàn)中夏比試樣擺放方式具有一定危險(xiǎn)性,且擺放位置精度易受影響問(wèn)題,提出一種改進(jìn) LSD的夏比試樣工位點(diǎn)定位方法。首先對(duì)采集到的夏比試樣圖像進(jìn)行預(yù)處理操作,基于預(yù)處理后
2022-09-29 11:28:47615 早在上世紀(jì)80年代,零點(diǎn)定位系統(tǒng)就已經(jīng)在德國(guó)出現(xiàn),但是國(guó)內(nèi)真正開(kāi)始重視這類(lèi)產(chǎn)品是在近兩三年,特別是工業(yè)4.0等自動(dòng)化概念提出之后越來(lái)越多的工廠開(kāi)始使用。 ▲ 圖1 AMF零點(diǎn)定位系統(tǒng) 零點(diǎn)定位系統(tǒng)
2022-08-03 17:50:113029 
本帖最后由 eehome 于 2013-1-5 09:53 編輯
全文較長(zhǎng),含有較多圖文,具體見(jiàn)附件電磁騷擾問(wèn)題的故障如何定位?一位研究電磁騷擾問(wèn)題20多年的資深專(zhuān)家——工業(yè)和信息化部電子第五
2011-11-21 18:08:39
定要根據(jù)振蕩電路的類(lèi)型選擇合適的晶振,否則將因晶振使用不當(dāng)或選用錯(cuò)誤造成電器工作異常或不能工作,選用貼片晶振應(yīng)遵循以下六點(diǎn)原則。1、選擇晶振類(lèi)型在選用的貼片晶振要考慮類(lèi)型,要搞清楚產(chǎn)品想要使用有源還是無(wú)源
2022-03-04 17:44:553545 的類(lèi)型選擇合適的晶振,否則將因晶振使用不當(dāng)或選用錯(cuò)誤造成電器工作異常或不能工作,選用貼片晶振應(yīng)遵循以下六點(diǎn)原則。晶振選用原則1、選擇晶振類(lèi)型在選用的貼片晶振要考慮
2022-02-20 15:57:29713 
故障點(diǎn)進(jìn)行定位。 二、功能特點(diǎn) 1. 創(chuàng)新地利用故障電流矢量分析法進(jìn)行架空線路接地點(diǎn)定位。 2. 數(shù)字
2021-11-29 11:16:46
季豐電子新增加高壓IV Curve和高壓熱點(diǎn)定位,主要應(yīng)用在MOS,SiC,IGBT等高壓產(chǎn)品的失效分析,IV Curve掃描電壓范圍在±3000V,通過(guò)IV Curve好壞品對(duì)比,我們可協(xié)助判斷壞
2021-10-15 11:50:173413 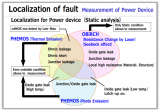
為減少多星座精密單點(diǎn)定位(PPP)數(shù)據(jù)處理過(guò)程中待估參數(shù)數(shù)量并提高定位精度,提岀基于模糊度整數(shù)解的無(wú)電離層組合PPP性能評(píng)估方法。使用在線單點(diǎn)定位服務(wù)進(jìn)行仿真建模,通過(guò)組合雙頻觀測(cè)值消除電離層待估
2021-06-25 14:16:22 2
2 基于位置的服務(wù)是物聯(lián)網(wǎng)最具發(fā)展?jié)摿Φ膽?yīng)用之一,提供可靠的節(jié)點(diǎn)定位信息已成為衡量物聯(lián)網(wǎng)技術(shù)標(biāo)準(zhǔn)的重要指標(biāo)。為有效地對(duì)未知節(jié)點(diǎn)進(jìn)行定位,針對(duì)果蠅優(yōu)化算法定位精度低以及收斂速度慢的問(wèn)題,提出一種基于果蠅
2021-05-26 16:58:166 針對(duì)目前基于學(xué)習(xí)的姿態(tài)估計(jì)方法對(duì)訓(xùn)練樣本及設(shè)備要求較高的問(wèn)題,提出一種基于面部特征點(diǎn)定位的無(wú)需訓(xùn)練即能估計(jì)單幅圖像中人臉姿態(tài)的方法。通過(guò) Adrian bulat人臉特征點(diǎn)定位
2021-05-24 15:43:3814 無(wú)線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)定位算法研究與實(shí)現(xiàn)。
2021-05-24 09:34:323 為提高無(wú)線傳感器網(wǎng)絡(luò)異常節(jié)點(diǎn)檢測(cè)精度并減小高維數(shù)據(jù)下的計(jì)算開(kāi)銷(xiāo),通過(guò)引入隨機(jī)矩陣?yán)碚摚≧MT),設(shè)計(jì)種新型無(wú)線傳感器網(wǎng)絡(luò)異常節(jié)點(diǎn)定位算法。根據(jù)原始數(shù)據(jù)的時(shí)空特性建立大數(shù)據(jù)矩陣,利用隨機(jī)矩陣對(duì)其做降維
2021-05-13 15:53:474 傳統(tǒng)無(wú)線傳感器網(wǎng)絡(luò)(wSN)節(jié)點(diǎn)定位算法難以適應(yīng)節(jié)點(diǎn)快速移動(dòng)的髙拓?fù)渥兓h(huán)境,導(dǎo)致識(shí)別誤差較大。針對(duì)該問(wèn)題,提出一種基于運(yùn)動(dòng)軌跡捕捉與正交覆蓋機(jī)制的wSN節(jié)點(diǎn)定位算法。利用捕捉錨節(jié)點(diǎn)射頻強(qiáng)度的方法
2021-05-12 16:39:552 廣州市工業(yè)和信息化局發(fā)布了《關(guān)于廣州市首臺(tái)(套)重點(diǎn)技術(shù)裝備推廣應(yīng)用指導(dǎo)目錄(2020年版)的公示》的通知,金鑒實(shí)驗(yàn)室自主研發(fā)的顯微紅外熱點(diǎn)定位測(cè)試系統(tǒng)成功入選廣州市首臺(tái)(套)重點(diǎn)技術(shù)裝備推廣應(yīng)用指導(dǎo)目錄(2020年版)。
2021-04-29 09:42:58940 近日,廣州市科學(xué)技術(shù)局公示了《廣州市2019年度創(chuàng)新產(chǎn)品目錄擬入選名單》,金鑒實(shí)驗(yàn)室自主研發(fā)的顯微光分布測(cè)試儀、顯微紅外熱點(diǎn)定位測(cè)試儀成功入選廣州市創(chuàng)新產(chǎn)品“科研儀器設(shè)備”目錄。
2021-04-29 09:36:41912 電子發(fā)燒友網(wǎng)為你提供選用電感器時(shí)應(yīng)考慮哪些方面?應(yīng)考慮這六點(diǎn)!資料下載的電子資料下載,更有其他相關(guān)的電路圖、源代碼、課件教程、中文資料、英文資料、參考設(shè)計(jì)、用戶指南、解決方案等資料,希望可以幫助到廣大的電子工程師們。
2021-04-29 08:49:0915 電子發(fā)燒友網(wǎng)為你提供高速電路設(shè)計(jì)中電阻應(yīng)用的六點(diǎn)資料下載的電子資料下載,更有其他相關(guān)的電路圖、源代碼、課件教程、中文資料、英文資料、參考設(shè)計(jì)、用戶指南、解決方案等資料,希望可以幫助到廣大的電子工程師們。
2021-03-29 16:49:1213 精密單點(diǎn)定位指的是利用全球若干地面跟蹤站的GPS觀測(cè)數(shù)據(jù)計(jì)算出的精密衛(wèi)星軌道和衛(wèi)星鐘差, 對(duì)單臺(tái)GPS接收機(jī)所采集的相位和偽距觀測(cè)值進(jìn)行定位解算。通常,衛(wèi)星導(dǎo)航系統(tǒng)能夠提供10米左右的定位精度,而
2020-10-14 15:12:501770 設(shè)置基準(zhǔn)定位點(diǎn)時(shí),通常在定位點(diǎn)的周?chē)舫霰绕浯?.5mm的無(wú)阻焊區(qū),不能有相似的焊盤(pán)或者別的類(lèi)似的。
2020-06-29 09:53:053534 一、Wi-Fi室內(nèi)定位技術(shù) 簡(jiǎn)單來(lái)說(shuō),Wi-Fi室內(nèi)定位技術(shù)采用的是三點(diǎn)定位的方式,即通過(guò)移動(dòng)接收設(shè)備以及三個(gè)Wi-Fi網(wǎng)絡(luò)接入點(diǎn)的無(wú)線信號(hào)來(lái)確定移動(dòng)接收設(shè)備的位置。由于三個(gè)Wi-Fi網(wǎng)絡(luò)接入點(diǎn)距離
2020-04-02 15:56:008421 智能電網(wǎng)首要特征要素(Key Elements)概括為六點(diǎn),即具有剛烈、自愈、兼容、經(jīng)濟(jì)、集成、優(yōu)化等特征。
2020-03-29 16:15:002335 零點(diǎn)定位系統(tǒng)在生產(chǎn)線中扮演著重要的角色,它可以大大減少更換工裝的時(shí)間,在各種金屬加工中均有運(yùn)用,尤其是加工中心,其更是“快換專(zhuān)家”。在2020年需要關(guān)注的夾持技術(shù)方向中,零點(diǎn)定位系統(tǒng)也是重要之一。
2020-01-19 15:53:0025503 無(wú)線傳感器網(wǎng)絡(luò)中的節(jié)點(diǎn)定位是指?jìng)鞲衅鞴?jié)點(diǎn)根據(jù)網(wǎng)絡(luò)中少數(shù)已知節(jié)點(diǎn)的位置信息,通過(guò)一定的定位技術(shù)確定網(wǎng)絡(luò)中其他節(jié)點(diǎn)的位置信息的過(guò)程。
2019-10-16 10:29:436700 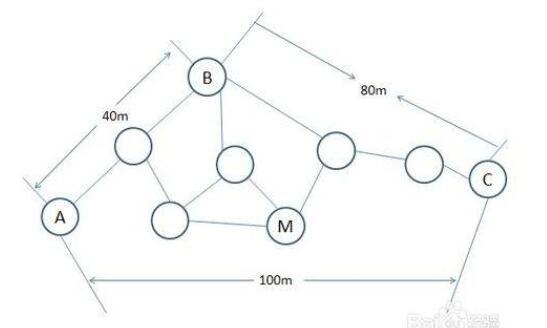
在使用貼片三極管過(guò)程,我們需要注意些什么?下面由小編大致列舉幾以下六點(diǎn).
2019-09-22 08:18:004873 介紹了一種基于無(wú)線傳感器網(wǎng)絡(luò)的移動(dòng)機(jī)器人節(jié)點(diǎn)定位實(shí)現(xiàn)方案, 闡述了節(jié)點(diǎn)定位的基本原理, 給出了節(jié)點(diǎn)硬件電路設(shè)計(jì)和相關(guān)的軟件工作流程, 并通過(guò)應(yīng)用試驗(yàn), 驗(yàn)證該方案具有較好的定位效果。
2019-09-20 17:08:0036 本文檔的主要內(nèi)容詳細(xì)介紹的是GNSS定位的基本原理及應(yīng)用的詳細(xì)資料說(shuō)明。
定位類(lèi)型絕對(duì)定位:絕對(duì)定位又稱(chēng)為單點(diǎn)定位,這是一種采用一臺(tái)接收機(jī)進(jìn)行定位的模式。相對(duì)定位:利用設(shè)置在坐標(biāo)已知的點(diǎn)(基準(zhǔn)站
2019-07-31 08:00:0019 本文檔的主要內(nèi)容詳細(xì)介紹的是51單片機(jī)學(xué)習(xí)教程之51單片機(jī)的六點(diǎn)知識(shí)點(diǎn)介紹包括了:1.51單片機(jī)控制蜂鳴器發(fā)聲原理,2.RST/Vpd引腳功能,3.數(shù)碼顯示管原理分析,4.80C51單片機(jī)中斷處理
2019-04-17 17:27:003 MOS管是金屬(metal)—氧化物(oxide)—半導(dǎo)體(semiconductor)場(chǎng)效應(yīng)晶體管,或者稱(chēng)是金屬—絕緣體(insulator)—半導(dǎo)體。
2018-10-25 10:15:2211758 電機(jī)燒毀在日常中很常見(jiàn),避免電機(jī)燒毀最有效的預(yù)防措施是進(jìn)行正確的技術(shù)維護(hù)。其主要維護(hù)方法有以下六點(diǎn),小編給大家簡(jiǎn)單介紹如下.
2018-09-24 17:26:0011937 針對(duì)物聯(lián)網(wǎng)感知層調(diào)度問(wèn)題,研究和分析三維空間基于四錨點(diǎn)節(jié)點(diǎn)定位實(shí)解個(gè)數(shù)的分類(lèi)問(wèn)題.利用不等式機(jī)器證明理論和研究成果以及不等式機(jī)器證明軟件DISCOVERER,分析了四錨點(diǎn)定位在特定情形下的實(shí)解分類(lèi)
2018-02-24 11:44:280 值與偽距進(jìn)行聯(lián)合單點(diǎn)定位,可以提高定位的精度和穩(wěn)定性。當(dāng)前已有學(xué)者對(duì)多普勒觀測(cè)值在定位和導(dǎo)航中的應(yīng)用進(jìn)行了研究。Chen等人研究了多普勒觀測(cè)值在GPS和北斗快速定位中的應(yīng)用等研究結(jié)果表明使用多普勒聯(lián)合偽距觀測(cè)值進(jìn)行定位的效
2018-02-23 09:49:030 成的思想,提出了一種信號(hào)矢量分解的采樣濾波移動(dòng)節(jié)點(diǎn)定位算法.該算法通過(guò)建立直角坐標(biāo)系,分解合成移動(dòng)節(jié)點(diǎn)、樣本點(diǎn)與信標(biāo)節(jié)點(diǎn)間的信號(hào)矢量,利用誤差圓環(huán)采樣,比較移動(dòng)節(jié)點(diǎn)與樣本點(diǎn)的信號(hào)合矢量進(jìn)行濾波,將合矢量模差絕對(duì)值最小的樣本點(diǎn)坐標(biāo)的均值作為移動(dòng)節(jié)點(diǎn)的坐標(biāo).
2018-02-09 14:01:110 的迭代次數(shù)內(nèi)快速收斂且實(shí)現(xiàn)深度搜索達(dá)到較高的精度。仿真實(shí)驗(yàn)結(jié)果表明:在應(yīng)用雙系統(tǒng)協(xié)同進(jìn)化算法對(duì)測(cè)試目標(biāo)函數(shù)進(jìn)行求解時(shí),能非常接近最優(yōu)解;同時(shí)將該算法應(yīng)用到基于接收信號(hào)強(qiáng)度值( RSSI)測(cè)距的節(jié)點(diǎn)定位中,預(yù)測(cè)位置與實(shí)際位置的絕對(duì)
2018-01-08 16:45:010 高壓輸電線故障點(diǎn)的準(zhǔn)確定位是從技術(shù)上提高電網(wǎng)安全經(jīng)濟(jì)運(yùn)行的重要措施,準(zhǔn)確的故障定位可以大量節(jié)約查線的人力物力,減輕工人繁重的體力勞動(dòng),可以發(fā)現(xiàn)因系故障而造成的設(shè)備隱患,提高運(yùn)行的可靠性,可以加快線路恢復(fù)供電,減少因停電而造成的巨大的綜合損失。
2018-01-05 16:36:181 針對(duì)目前移動(dòng)無(wú)線傳感器網(wǎng)絡(luò)定位問(wèn)題存在的不足,提出了一種基于改進(jìn)的洪泛廣播機(jī)制和粒子濾波的節(jié)點(diǎn)定位算法。對(duì)于一個(gè)給定的未知節(jié)點(diǎn),首先采用改進(jìn)的洪泛廣播機(jī)制,從離它最近的錨節(jié)點(diǎn)得到的有效平均跳距來(lái)
2017-12-11 15:53:360 為了提高WSN節(jié)點(diǎn)定位精度,針對(duì)測(cè)距誤差對(duì)定位結(jié)果的影響,提出基于模糊C均值聚類(lèi)的定位算法。算法首先利用多邊定位算法得到若干個(gè)定位結(jié)果,利用模糊C均值聚類(lèi)算法對(duì)定位結(jié)果進(jìn)行聚類(lèi)分析,然后,根據(jù)聚類(lèi)
2017-11-09 17:47:1310 GPS模塊的網(wǎng)點(diǎn)定位的選點(diǎn)原則
GPS模塊定位裝備,好比手持GPS定位儀、車(chē)載GPS定位儀等等,使用天線時(shí)時(shí)候刻在吸收衛(wèi)星定位信號(hào),通過(guò)內(nèi)部盤(pán)算(現(xiàn)實(shí)上是后方交會(huì)法),儀器就會(huì)及時(shí)得知地點(diǎn)位置的坐標(biāo),這就定出位了。
2017-09-12 14:08:593 基于改進(jìn)APIT算法的無(wú)線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)定位_戴天虹
2017-03-19 19:25:560 無(wú)線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)定位算法的改進(jìn)_許紅艷
2017-03-15 10:49:580 無(wú)線傳感網(wǎng)絡(luò)節(jié)點(diǎn)定位算法分析_史文進(jìn)
2017-03-04 18:08:580 RSSI泰勒級(jí)數(shù)修正在移動(dòng)節(jié)點(diǎn)定位中的研究_龔健
2017-02-28 20:32:020 基于改進(jìn)的粒子群算法在WSN節(jié)點(diǎn)定位中的研究_陳玲君
2017-02-27 19:07:370 針對(duì)工業(yè)物聯(lián)網(wǎng)的特點(diǎn),首先利用基于工業(yè)物聯(lián)網(wǎng)虛擬令牌控制的MAC協(xié)議,采用接收信號(hào)強(qiáng)度多次測(cè)距的雙曲線定位算法提出適用于工業(yè)物聯(lián)網(wǎng)的定位模型。最后在硬件平臺(tái)上實(shí)現(xiàn)節(jié)點(diǎn)定位,并通過(guò)定位監(jiān)控軟件對(duì)節(jié)點(diǎn)的定位運(yùn)行情況進(jìn)行實(shí)時(shí)監(jiān)控,監(jiān)控顯示定位效果能滿足工業(yè)物聯(lián)網(wǎng)的要求,且工業(yè)物聯(lián)網(wǎng)協(xié)議嵌入定位后運(yùn)行穩(wěn)定。
2017-01-13 15:41:150 2014-04-07 15:00:223 本文對(duì)基于無(wú)線傳感器網(wǎng)絡(luò)的車(chē)載節(jié)點(diǎn)定位方法進(jìn)行了研究,測(cè)試分析了新型的TOF無(wú)線傳感器芯片JN5148的測(cè)距效果,研究了固定節(jié)點(diǎn)分布對(duì)車(chē)輛定位的影響
2012-11-01 16:35:001855 
在構(gòu)建適用于庫(kù)區(qū)特定環(huán)境的無(wú)線傳感器網(wǎng)絡(luò)監(jiān)控系統(tǒng)下,針對(duì)節(jié)點(diǎn)定位精度和使用壽命的要求,采用改進(jìn)后的最小二乘法對(duì)節(jié)點(diǎn)坐標(biāo)進(jìn)行求精,在保證定位精度的同時(shí)降低節(jié)點(diǎn)能耗。
2012-05-07 14:10:2527 在骨齡自動(dòng)化評(píng)定系統(tǒng)的研究中,指骨關(guān)鍵點(diǎn)的定位是其中的一個(gè)比較重要的環(huán)節(jié),對(duì)后續(xù)工作研究關(guān)系重大。由于指骨關(guān)鍵點(diǎn)是手掌輪廓變化最大的地方,因此把圖像中常用的角點(diǎn)檢
2011-08-05 15:18:3524 討論了 GPS 精密單點(diǎn)定位中的3種常用模型傳統(tǒng)模型、UofC模型和無(wú)模糊度模型。將這3種模型分別應(yīng)用到星載GPS衛(wèi)星的非差運(yùn)動(dòng)學(xué)定軌實(shí)踐中,并對(duì)定軌結(jié)果進(jìn)行了比較、分析。結(jié)果表明
2011-05-30 18:24:4030 基于相關(guān)檢測(cè)的漏點(diǎn)定
2010-09-04 22:44:2124 節(jié)點(diǎn)定位是無(wú)線傳感器網(wǎng)絡(luò)中的重要應(yīng)用之一。為了有效抑制各種因素對(duì)無(wú)線傳感器節(jié)點(diǎn)定位精度的影響,以三邊定位算法為基礎(chǔ),提出了一種基于誤差校正的定位算法。該算法
2010-09-02 15:25:4543 在往返式傳動(dòng)控制系統(tǒng)中,很多時(shí)候都會(huì)涉及到多點(diǎn)定位問(wèn)題。即要求在不同的定位點(diǎn)啟動(dòng)不同的機(jī)械動(dòng)作。但由于機(jī)械慣性的作用,常常會(huì)給系統(tǒng)帶來(lái)定點(diǎn)誤差。本系統(tǒng)以龍門(mén)刨床的
2010-07-14 15:08:3241 液晶選購(gòu)六要素必學(xué)
注意六點(diǎn)事項(xiàng),買(mǎi)電視無(wú)憂!
在液晶領(lǐng)域不斷成熟發(fā)展的今天,各廠商也在
2010-02-11 12:10:08393 針對(duì)多重觸控技術(shù)中的多觸點(diǎn)遮擋難題,該文提出一種基于4路攝像頭協(xié)同的多觸點(diǎn)定位方法。該方法利用矩形交互區(qū)4頂點(diǎn)處的4路攝像頭同步獲取交互區(qū)圖像,檢測(cè)目標(biāo)觸點(diǎn),根據(jù)
2010-02-09 12:03:4314 GPS單點(diǎn)定位資料 單點(diǎn)定位,包括計(jì)算星歷軌道和地面點(diǎn)坐標(biāo)
2010-02-08 16:33:1140 無(wú)線傳感器網(wǎng)絡(luò)在眾多領(lǐng)域有著重大的應(yīng)用價(jià)值,而網(wǎng)絡(luò)的節(jié)點(diǎn)定位技術(shù)是這些應(yīng)用的基本支撐技術(shù)。本文針對(duì)無(wú)線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)的定位精度問(wèn)題,提出一種新的分布式節(jié)點(diǎn)
2010-01-18 14:09:1329 本文提出一種基于Shape Index 特征和幾何約束的三維人臉標(biāo)志點(diǎn)定位方法。首先通過(guò)曲面擬合計(jì)算模型的連續(xù)Shape Index 特征,對(duì)Shape Index 特征進(jìn)行閾值分割和區(qū)域標(biāo)記,然后由統(tǒng)計(jì)
2009-12-19 13:56:4228 PLC在多點(diǎn)定位及往返系統(tǒng)中的控制研究:在往返式傳動(dòng)控制系統(tǒng)中,很多時(shí)候都會(huì)涉及到多點(diǎn)定位問(wèn)題。即要求在不同的定位點(diǎn)啟動(dòng)不同的機(jī)械動(dòng)作。但由于機(jī)械慣性的作用,常常會(huì)
2009-10-30 08:34:1932 節(jié)點(diǎn)定位技術(shù)是無(wú)線傳感器網(wǎng)絡(luò)的支撐技術(shù),給無(wú)線傳感器網(wǎng)絡(luò)的各種應(yīng)用提供節(jié)點(diǎn)的位置信息,具有重要作用。本文對(duì)基于測(cè)距的DV-distance 算法的誤差及其產(chǎn)生原因進(jìn)行了分析
2009-09-09 15:38:2615 PLC在多點(diǎn)定位及往返系統(tǒng)中的控制研究
在往返式傳動(dòng)控制系統(tǒng)中,很多時(shí)候都會(huì)涉及到多點(diǎn)定位問(wèn)題。即要求在不同的定位點(diǎn)啟動(dòng)
2009-06-13 16:16:481810 
節(jié)點(diǎn)定位是無(wú)線傳感器網(wǎng)絡(luò)中的關(guān)鍵性問(wèn)題,大多數(shù)定位方法無(wú)法評(píng)估每個(gè)節(jié)點(diǎn)的定位精度。該文提出一種無(wú)需測(cè)距的定位算法,將傳感器節(jié)點(diǎn)的真實(shí)位置限定于一個(gè)區(qū)域中,使用
2009-04-21 09:28:5717 為提高無(wú)線傳感器網(wǎng)絡(luò)(WSN)的節(jié)點(diǎn)定位的估計(jì)精度,提出基于自由搜索優(yōu)化的智能估計(jì)定位算法。自由搜索是一種新的群集智能算法,應(yīng)用于函數(shù)優(yōu)化。該算法計(jì)算量少、收斂速度高
2009-04-13 08:32:4815 無(wú)觸點(diǎn)定時(shí)器:采用JEC-2集成電路構(gòu)成無(wú)觸點(diǎn)定時(shí)器,它的原理電路如圖:
2007-12-13 22:38:24509 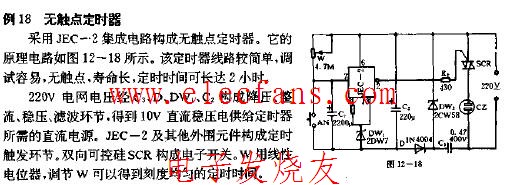
 電子發(fā)燒友App
電子發(fā)燒友App



 。為使剛體在空間具有確定的
。為使剛體在空間具有確定的









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論