全國產(chǎn)EtherCAT運(yùn)動控制邊緣控制器ZMC432H是正運(yùn)動的一款軟硬件全國產(chǎn)自主可控,運(yùn)動控制接口兼容EtherCAT總線和脈沖型的獨立式運(yùn)動控制器,最多支持32軸運(yùn)動控制,同時支持正運(yùn)動遠(yuǎn)程HMI功能,能提供網(wǎng)絡(luò)組態(tài)顯示,可實時監(jiān)控和調(diào)整參數(shù)配置。
2023-10-22 10:51:57 110
110 
全國產(chǎn)EtherCAT運(yùn)動控制邊緣控制器ZMC432H是正運(yùn)動的一款軟硬件全國產(chǎn)自主可控,運(yùn)動控制接口兼容EtherCAT總線和脈沖型的獨立式運(yùn)動控制器,最多支持32軸運(yùn)動控制,同時支持正運(yùn)動遠(yuǎn)程HMI功能,能提供網(wǎng)絡(luò)組態(tài)顯示,可實時監(jiān)控和調(diào)整參數(shù)配置。
2023-10-16 09:49:53125 
點位運(yùn)動控制:即僅對終點位置有要求,與運(yùn)動的中間過程即運(yùn)動軌跡無關(guān)。相應(yīng)的運(yùn)動控制器要求具有快速的定位速度,在運(yùn)動的加速段和減速段,采用不同的加減速控制策略。
2023-10-09 17:10:10303 現(xiàn)在PLC的運(yùn)動控制功能越來越強(qiáng)了,圓弧插補(bǔ)、螺旋插補(bǔ)、電子凸輪都能輕松勝任了,那運(yùn)動控制器和具備運(yùn)動控制功能的PLC的差別在哪里,運(yùn)動控制器以后的優(yōu)勢又在哪里?PLC及運(yùn)動控制器發(fā)展到今天,它們在
2023-08-08 08:09:46412 
“現(xiàn)在 PLC 的運(yùn)動控制功能越來越強(qiáng)了,圓弧插補(bǔ)、螺旋插補(bǔ)、電子凸輪都能輕松勝任了,那運(yùn)動控制器和具備運(yùn)動控制功能的 PLC 的差別在哪里,運(yùn)動控制器以后的優(yōu)勢又在哪里?”
2023-08-06 09:30:01758 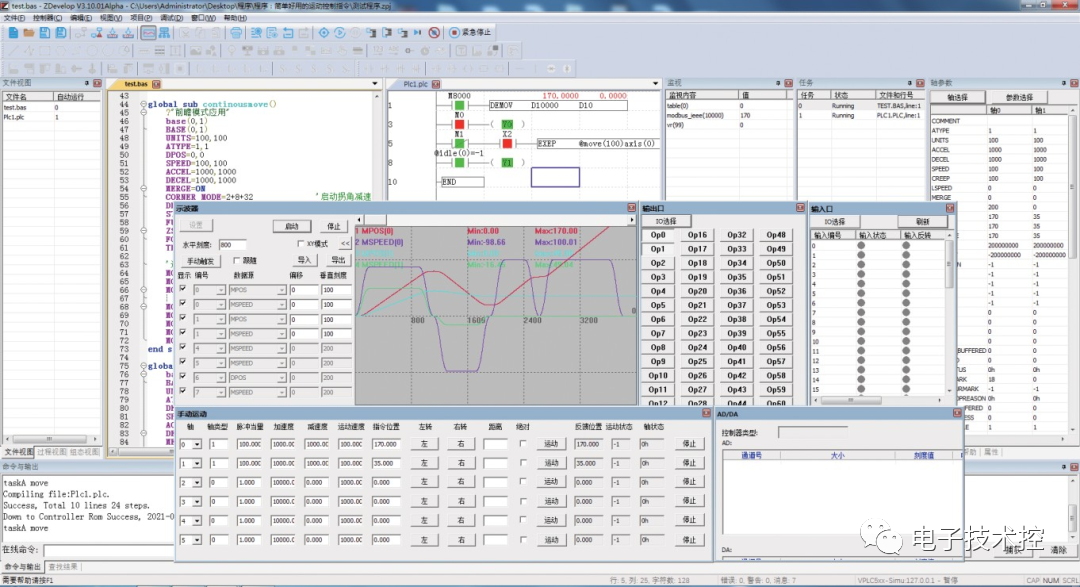
前言最近有不少做PLC開發(fā)的小伙伴,在一些咨詢運(yùn)動控制卡、運(yùn)動控制器相關(guān)的問題,很多人不清楚它們之間有什么區(qū)別和聯(lián)系,今天跟大家就PLC、運(yùn)動控制卡、運(yùn)動控制器區(qū)別及選型做個分享。背景隨著工業(yè)技術(shù)
2023-08-04 08:09:12592 運(yùn)動控制器是一種電子設(shè)備,通常與運(yùn)動控制軟件配合使用,用于控制機(jī)器人、數(shù)控機(jī)床和其他自動化設(shè)備移動或執(zhí)行各種任務(wù)。運(yùn)動控制器主要由一臺計算機(jī)和相關(guān)的硬件組成,如數(shù)字信號處理器(DSP)和模擬/數(shù)字
2023-07-31 17:42:41339 1.運(yùn)動控制為數(shù)控機(jī)床、機(jī)器人等高端裝備“大腦” 1.1 運(yùn)動控制系統(tǒng)是數(shù)控機(jī)床、機(jī)器人等高端裝備高效運(yùn)行核心環(huán)節(jié) 運(yùn)動控制系統(tǒng)是依照具體的運(yùn)動軌跡要求,根據(jù)負(fù)載情況,通過驅(qū)動器、驅(qū)動執(zhí)行電機(jī)完 成
2023-07-07 11:17:50443 
運(yùn)動控制器的工作原理是將預(yù)定的控制方案、規(guī)劃指令轉(zhuǎn)變成期望的機(jī)械運(yùn)動,實現(xiàn)機(jī)械運(yùn)動精確的位置(點位、運(yùn)動軌跡、插補(bǔ)等)控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。
2023-06-25 10:44:54947 
運(yùn)動控制卡是基于PC機(jī)及工業(yè)PC機(jī)、 用于各種運(yùn)動控制場合(包括位移、速度、加速度等)的上位控制單元。 運(yùn)動控制卡基于PC總線,是利用高性能微處理器(如DSP)及大規(guī)模可編程器件實現(xiàn)多個伺服電機(jī)的多
2023-06-14 15:39:06241 運(yùn)動控制在實際的工業(yè)現(xiàn)場中隨處可見,也常聽到大家提到運(yùn)動控制;哪什么叫運(yùn)動控制?以及基本概念有哪些?下面我們?yōu)榇蠹易龊唵蔚慕榻B
2023-06-14 09:40:59150 
運(yùn)動控制器是一種特殊的控制器,用于控制電機(jī)的運(yùn)行模式:例如,電機(jī)通過沖擊開關(guān)控制交流接觸器,將電機(jī)拉到指定位置,然后下降或使用時間繼電器控制電機(jī)的前后旋轉(zhuǎn),或先停一會兒,再停一會兒。運(yùn)動控制在機(jī)器人和數(shù)控機(jī)床領(lǐng)域的應(yīng)用比在專用機(jī)床中更復(fù)雜,因為后者的運(yùn)動形式更簡單,通常被稱為通用運(yùn)動控制。
2023-06-12 17:17:23857 運(yùn)動控制是工業(yè)自動化系統(tǒng)的子系統(tǒng)。它同步化控制多個電機(jī)來完成一系列運(yùn)動。例如,多軸機(jī)械臂需要多個電機(jī)無縫地協(xié)同運(yùn)行才能做出特定的動作。運(yùn)動控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動學(xué)轉(zhuǎn)換。運(yùn)動控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2023-05-25 10:28:55264 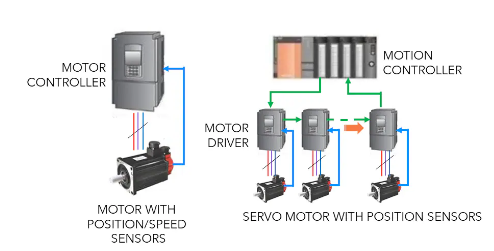
運(yùn)動控制系統(tǒng) 其實運(yùn)動控制系統(tǒng)是一個比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會由眾多的組成部分構(gòu)成。運(yùn)動控制系統(tǒng)會綜合信號分析與處理、自動控制、通信等的內(nèi)容。 運(yùn)動的要素 抽象來講,運(yùn)動的要素可
2023-04-21 18:02:14682 運(yùn)動控制器主要分為三類,分別是PC-based、專用控制器、PLC。其中PC-based運(yùn)動控制器在電子、EMS等行業(yè)被廣泛應(yīng)用;專用控制器的代表行業(yè)是風(fēng)電、光伏、機(jī)器人、成型機(jī)械等等;PLC則在橡膠、汽車、冶金等行業(yè)備受青睞。
2023-04-10 12:56:43661 C#對雷賽運(yùn)動控制卡的應(yīng)用案例1:定長運(yùn)動2:連續(xù)運(yùn)動3:插補(bǔ)運(yùn)動4:PVT運(yùn)動5:手輪運(yùn)動6:回原點運(yùn)動7:IO8:AD-DA9:高速位置比較+鎖存
2023-03-31 15:13:02 0
0 運(yùn)動控制是工業(yè)自動化系統(tǒng)的子系統(tǒng)。它同步化控制多個電機(jī)來完成一系列運(yùn)動。例如,多軸機(jī)械臂需要多個電機(jī)無縫地協(xié)同運(yùn)行才能做出特定的動作。運(yùn)動控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動學(xué)轉(zhuǎn)換。運(yùn)動控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2023-03-14 09:17:02174 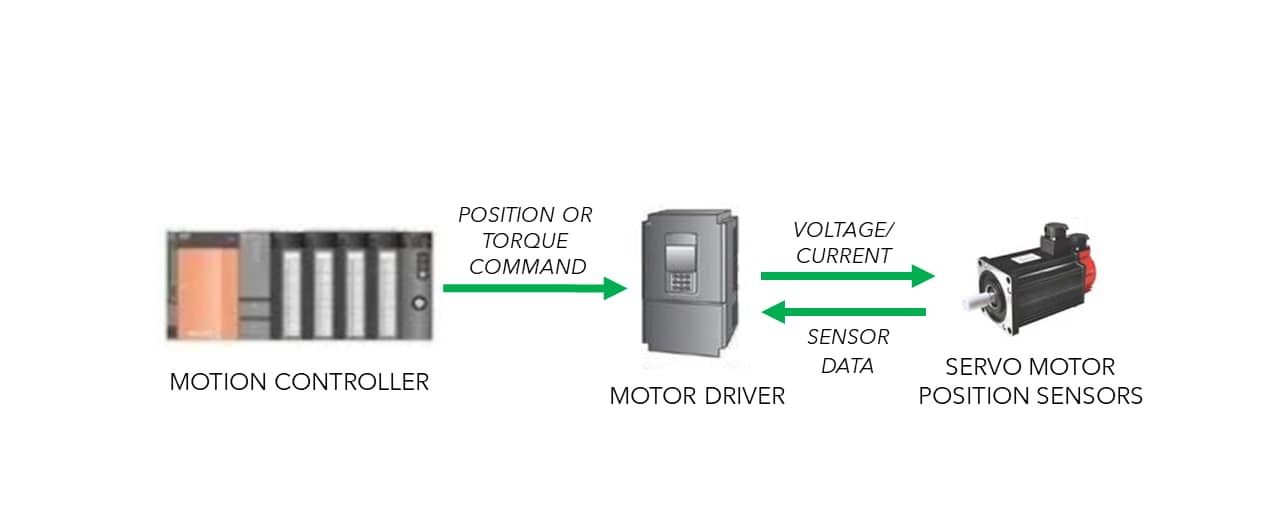
項目需求 利用運(yùn)動控制卡,快速搭建運(yùn)動控制平臺。所需硬件:個人電腦;正運(yùn)動控制卡;艾思控驅(qū)動器;鳴志直流無刷電機(jī)。軟件平臺:python 硬件介紹 正運(yùn)動控制卡 控制卡用于接收PC的運(yùn)動指令,然后以
2023-03-10 10:01:130 運(yùn)動控制器主要分為三類,分別是PC-based、專用控制器、PLC。其中PC-based運(yùn)動控制器在電子、EMS等行業(yè)被廣泛應(yīng)用;專用控制器的代表行業(yè)是風(fēng)電、光伏、機(jī)器人、成型機(jī)械等等;PLC則在橡膠、汽車、冶金等行業(yè)備受青睞。
2023-03-08 16:52:431534 電工術(shù)語+自動控制
2012-03-01 22:12:58
運(yùn)動控制是工業(yè)自動化系統(tǒng)的子系統(tǒng)。它同步化控制多個電機(jī)來完成一系列運(yùn)動。例如,多軸機(jī)械臂需要多個電機(jī)無縫地協(xié)同運(yùn)行才能做出特定的動作。運(yùn)動控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動學(xué)轉(zhuǎn)換。運(yùn)動控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2022-07-22 09:52:463111 XPLC006E是正運(yùn)動運(yùn)動控制器推出的一款多軸經(jīng)濟(jì)型EtherCAT總線運(yùn)動控制器,XPLC系列運(yùn)動控制器可應(yīng)用于各種需要脫機(jī)或聯(lián)機(jī)運(yùn)行的場合。
2022-06-23 16:49:12794 正運(yùn)動技術(shù)專注于運(yùn)動控制技術(shù)研究和通用運(yùn)動控制軟硬件產(chǎn)品的研發(fā),是國家級高新技術(shù)企業(yè)。主要業(yè)務(wù)有:運(yùn)動控制卡_運(yùn)動控制器_EtherCAT運(yùn)動控制卡_EtherCAT控制器_運(yùn)動控制系統(tǒng)_視覺控制器__運(yùn)動控制PLC_運(yùn)動控制_機(jī)器人控制器_視覺定位等等。
2022-04-19 17:03:422859 
Elmo埃莫運(yùn)動控制(上海)有限公司總部位于以色列,在美國、中國、德國、意大利、韓國、波蘭和英國設(shè)有辦事處,是高性能運(yùn)動控制技術(shù)的全球領(lǐng)導(dǎo)者之一。
我們提供完整的運(yùn)動解決方案,設(shè)計并制造尖端
2022-01-10 10:48:04
EtherCAT運(yùn)動控制卡實現(xiàn)C#的單軸運(yùn)動控制的例程
2021-10-22 16:07:321414 
運(yùn)動模式是指規(guī)劃一個或多個軸運(yùn)動的方式。 運(yùn)動控制器支持的運(yùn)動模式有點位運(yùn)動模式、 Jog運(yùn)動模式、電子齒輪(即 Gear) 運(yùn)動模式和插補(bǔ)運(yùn)動模式
2019-11-25 08:00:0023 運(yùn)動控制器是整個運(yùn)動控制系統(tǒng)的核心,作用是執(zhí)行編寫的程序,通過采集現(xiàn)場的I/O信號,實現(xiàn)各種運(yùn)算功能,對程序流程和I/O設(shè)備進(jìn)行控制,并與操作站和其他現(xiàn)場設(shè)備進(jìn)行通信。
2019-09-18 10:39:124738 本文首先介紹了運(yùn)動控制器的架構(gòu)組成及優(yōu)缺點,其次介紹了運(yùn)動控制器的功能,最后闡述了運(yùn)動控制器的工作原理及應(yīng)用。
2018-04-23 18:40:2234708 227個自動化儀表與控制系統(tǒng)術(shù)語
2018-03-06 10:20:295264 運(yùn)動控制系統(tǒng)的定義 運(yùn)動控制系統(tǒng)(Motion Control System)也可稱作電力拖動控制系統(tǒng)(Control Systems of Electric Drive) 運(yùn)動控制系統(tǒng)--通過
2017-11-09 11:35:2414 PPT運(yùn)動控制電力拖動
2017-03-21 20:01:594 運(yùn)動控制起源于早期的伺服控制,本文與讀者分享的是運(yùn)動控制的定義、運(yùn)動控制系統(tǒng)的基本架構(gòu)組成以及在運(yùn)動控制方面幾項運(yùn)動所需控制軌跡等
2013-04-07 10:47:253383 運(yùn)動控制器已經(jīng)從以單片機(jī)或微處理器作為核心的運(yùn)動控制器和以專用芯片(ASIC)作為核心處理器的運(yùn)動控制器,發(fā)展到了基于PC總線的以DSP和FPGA作為核心處理器的開放式運(yùn)動控
2010-10-07 15:30:3876 模具設(shè)計術(shù)語解析
上極點 上極點是壓力機(jī)滑塊上下運(yùn)動的上端終點。 下極點 下極點是壓力機(jī)滑塊上下運(yùn)動
2010-02-21 11:12:12696 模具設(shè)計術(shù)語上極點 上極點是壓力機(jī)滑塊上下運(yùn)動的上端終點。 下極點 下極點是壓力機(jī)滑塊上下運(yùn)動的下端終點。 毛刺 毛刺
2009-11-14 17:33:02731 設(shè)計了一種新型的基于SOPC(system on a programmable chip)的運(yùn)動控制器,該運(yùn)動控制器以PC 機(jī)為上位機(jī),采用數(shù)字控制方式實現(xiàn)三坐標(biāo)的運(yùn)動控制和相關(guān)I/O 接口控制功能。運(yùn)動控制器采
2009-09-01 15:09:4320 小車運(yùn)動及速度控制一、實驗?zāi)康男≤囋?b style="color: red">運(yùn)動中,控制小車的控制速度是必要,通過控制小車驅(qū)動電機(jī)的電流可以實現(xiàn)對電機(jī)速度的控制。采用PWM 脈沖可以
2009-03-23 11:01:122622 
模具設(shè)計術(shù)語
上極點 上極點是壓力機(jī)滑塊上下運(yùn)動的上端終點。 下極點 下極點是壓力機(jī)滑塊上下運(yùn)動的下端終點。 毛
2008-08-03 12:00:30683
 電子發(fā)燒友App
電子發(fā)燒友App















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論