 電子發燒友App
電子發燒友App


?????? 設計人員進行工業或數據采集項目設計時,很可能會遇到下面所述的一些問題:
● 對極寬動態范圍內的輸入信號進行數字化處理,例如環境聲壓計要能在60dB至80dB范圍內檢測信號。
● 適應不同來源且信號范圍截然不同的信號。
● 解析某一確定值的上下微小變化,旨在擴展以該點為中心的范圍。
如果使用相對較低分辨率的ADC,如10位有效分辨率,高電平信號的分辨率可能接近10位。然而,對于低電平信號,如果小于滿量程的10%,其有效分辨率可能不超過6或7位。因此在很多情況下,對于精度只有1%的傳感器來說,等效精度為0.1%的10位分辨率足夠了。然而,對于更低電平信號,有效分辨率可能小于1%。
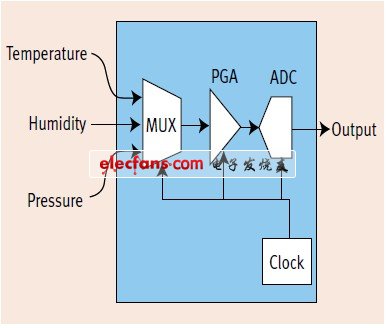
圖1:集成PGA的ADC原理示意圖
設計問題的解決之道
這些設計問題有很多解決方法,以下主要列出三種:
● 在相對較低分辨率ADC之前連接可編程增益放大器(PGA)。
● 將輸入信號加在ADC之前連接的緩沖放大器。
● 使用高分辨率ADC。
下面逐一評估這些方法。
PGA方法—歷史上,PGA方法曾經非常流行,因為與較低成本ADC配對使用時,它比高分辨率ADC更具成本優勢。此方法特別適用于輸入信號接近0V但具有較寬動態范圍的情況。
這類似于過程控制系統,需要監控具有不同信號范圍的各種傳感器信號,例如聲壓計。如果對較寬動態范圍的信號進行增益范圍調整,所產生的最關鍵誤差是“交越不匹配”。
這意味著當PGA切換到不同的增益值時,數字輸出可能在那個點發生上下跳變。因此,在每一級都必須小心匹配增益來降低這種影響。從不同信號源中復用信號時,這個問題并不重要。不過,這取決于系統是否針對每個信號設計了固定增益(如圖2所示),或者是否像使用寬范圍信號輸入一樣具有動態增益切換。
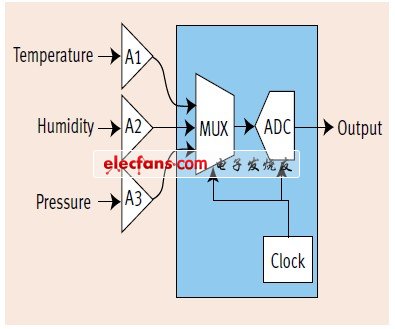
圖2:帶獨立緩沖放大器的ADC原理示意圖
增益范圍調整方法會產生以下問題:
● 雖然可驅動一個12位ADC,但如果在其前面放置一個增益為27 = 128的放大器,則放大器的有效輸入噪聲和失調電壓精度必須為18位。
對于采用固定增益運算放大器,這會有問題,而采用PGA切換時,問題可能還會更嚴重。這樣,將精度要求從ADC轉移到PGA,卻沒有帶來任何好處。
● 在進行增益切換時,必須先對信號有所了解。可使用ADC的超量程輸出,并配合軟件,或者通過比較器來實現這一點。過程很麻煩,而且切換時間也會是個問題。(也許您還記得古老的增益范圍調整DVM,在改變范圍時它的速度有多慢!)● 可以對增益為128的精密低噪聲運算放大器進行簡單的分析:計算有效輸出噪聲和失調電壓,并與低分辨率ADC的最低有效位(LSB)進行比較。然而,在高增益模式下,運算放大器的線性度會是個問題。
多緩沖放大器方法—如果傳感器或者信號源與內置ADC的數據采集單元有一定距離,可以使用多緩沖放大器方法(見圖2)。
單個高分辨率ADC—單個高分辨率ADC的優點是簡單(見圖3)。如果使用16位ADC,對于較小動態范圍的信號,丟失3、4或5位會使該信號的有效分辨率降至11至14位。然而,對于大多數傳感器來說此精度足夠了,因為其精度相當于0.05%或更佳。

圖3:單個高分辨率ADC原理示意圖
由于這些器件的價格最近已降到5美元或更低,因此成本將不再是需要考慮的因素。如果需要更高的有效分辨率,或者需要適應更寬的動態范圍,可以使用18至24位的ADC,仍然能提供性價比較高、也更簡單的系統。
需解析0點附近某個信號值的微小變化時,顯然應選擇使用高分辨率ADC。
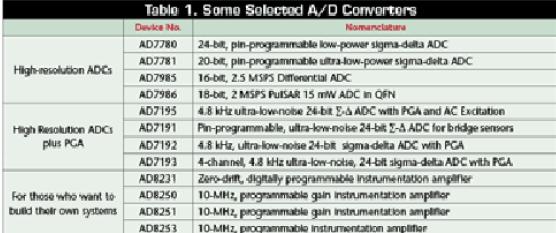
這也是利用數模轉換器(DAC)補償大多數信號的替代方案。在有些情況下,這仍然是一種可行的選擇。目前適合增益范圍調整方法的一款較流行PGA是AD8250。表1列出了一些ADC供參考。
表1:一些選定的ADC












 工商網監
工商網監
評論