 電子發(fā)燒友App
電子發(fā)燒友App


步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主要執(zhí)行元件,應(yīng)用極為廣泛。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,稱為“步距角”,它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行的。可以通過控制脈沖個(gè)數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時(shí)可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度,從而達(dá)到調(diào)速的目的。
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器。
雖然步進(jìn)電機(jī)已被廣泛地應(yīng)用,但步進(jìn)電機(jī)并不能像普通的直流電機(jī),交流電機(jī)在常規(guī)下使用。它必須由雙環(huán)形脈沖信號(hào)、功率驅(qū)動(dòng)電路等組成控制系統(tǒng)方可使用。因此用好步進(jìn)電機(jī)卻非易事,它涉及到機(jī)械、電機(jī)、電子及計(jì)算機(jī)等許多專業(yè)知識(shí)。步進(jìn)電機(jī)作為執(zhí)行元件,是機(jī)電一體化的關(guān)鍵產(chǎn)品之一,廣泛應(yīng)用在各種自動(dòng)化控制系統(tǒng)中。隨著微電子和計(jì)算機(jī)技術(shù)的發(fā)展,步進(jìn)電機(jī)的需求量與日俱增,在各個(gè)國(guó)民經(jīng)濟(jì)領(lǐng)域都有應(yīng)用。
步進(jìn)電機(jī)基本原理
工作原理
通常電機(jī)的轉(zhuǎn)子為永磁體,當(dāng)電流流過定子繞組時(shí),定子繞組產(chǎn)生一矢量磁場(chǎng)。該磁場(chǎng)會(huì)帶動(dòng)轉(zhuǎn)子旋轉(zhuǎn)一角度,使得轉(zhuǎn)子的一對(duì)磁場(chǎng)方向與定子的磁場(chǎng)方向一致。當(dāng)定子的矢量磁場(chǎng)旋轉(zhuǎn)一個(gè)角度。轉(zhuǎn)子也隨著該磁場(chǎng)轉(zhuǎn)一個(gè)角度。每輸入一個(gè)電脈沖,電動(dòng)機(jī)轉(zhuǎn)動(dòng)一個(gè)角度前進(jìn)一步。它輸出的角位移與輸入的脈沖數(shù)成正比、轉(zhuǎn)速與脈沖頻率成正比。改變繞組通電的順序,電機(jī)就會(huì)反轉(zhuǎn)。所以可用控制脈沖數(shù)量、頻率及電動(dòng)機(jī)各相繞組的通電順序來控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)。
發(fā)熱原理
通常見到的各類電機(jī),內(nèi)部都是有鐵芯和繞組線圈的。繞組有電阻,通電會(huì)產(chǎn)生損耗,損耗大小與電阻和電流的平方成正比,這就是我們常說的銅損,如果電流不是標(biāo)準(zhǔn)的直流或正弦波,還會(huì)產(chǎn)生諧波損耗;鐵心有磁滯渦流效應(yīng),在交變磁場(chǎng)中也會(huì)產(chǎn)生損耗,其大小與材料,電流,頻率,電壓有關(guān),這叫鐵損。銅損和鐵損都會(huì)以發(fā)熱的形式表現(xiàn)出來,從而影響電機(jī)的效率。步進(jìn)電機(jī)一般追求定位精度和力矩輸出,效率比較低,電流一般比較大,且諧波成分高,電流交變的頻率也隨轉(zhuǎn)速而變化,因而步進(jìn)電機(jī)普遍存在發(fā)熱情況,且情況比一般交流電機(jī)嚴(yán)重。
步進(jìn)電機(jī)驅(qū)動(dòng)電路
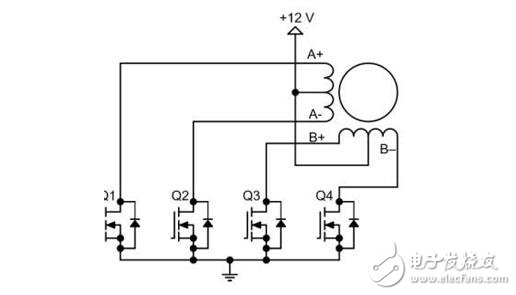
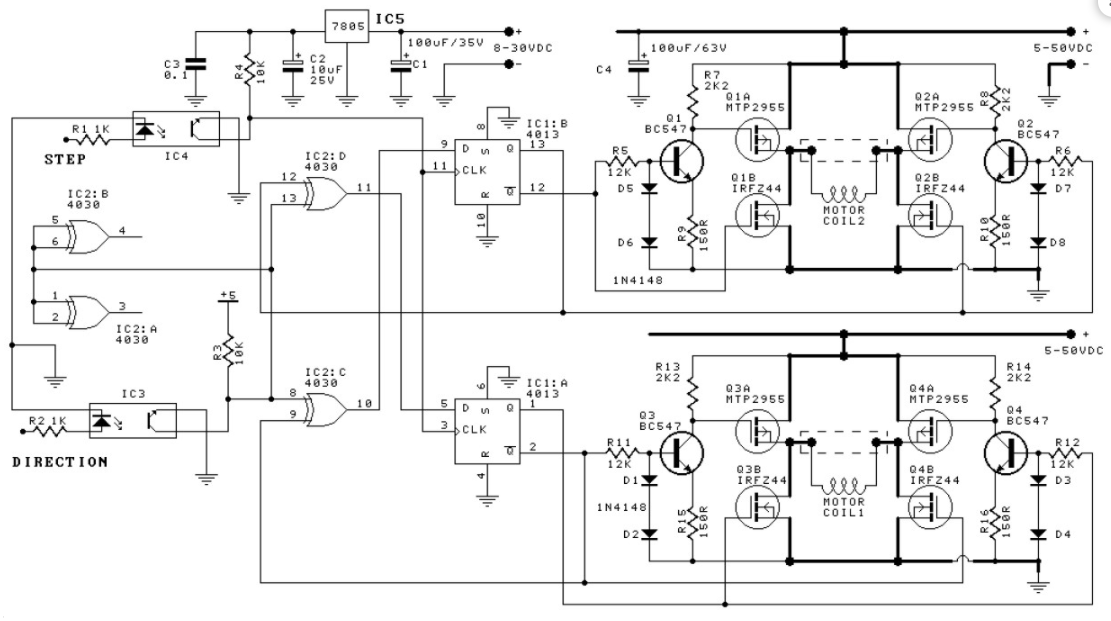
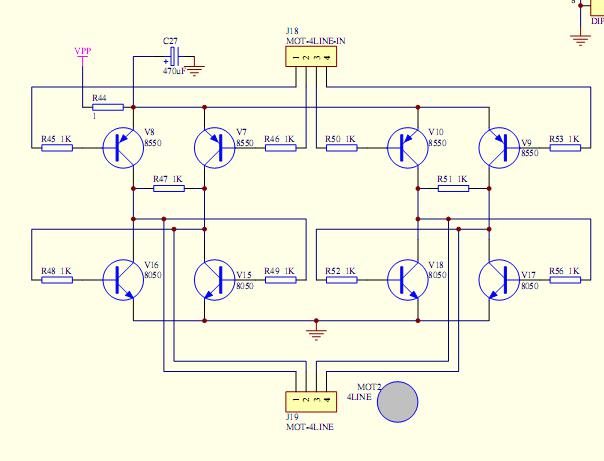
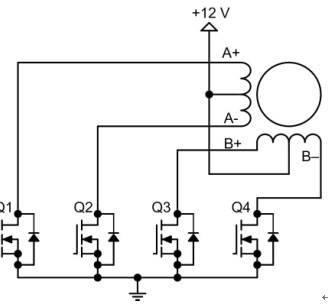
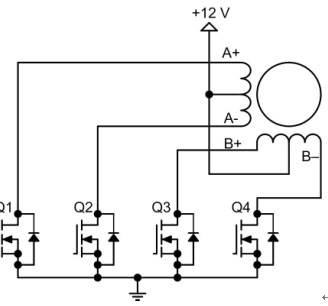
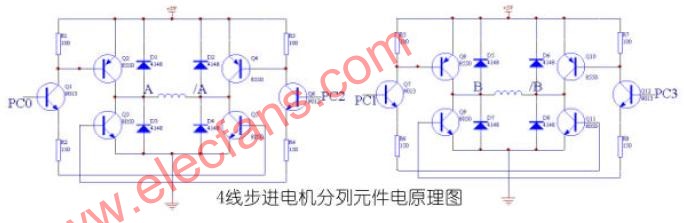
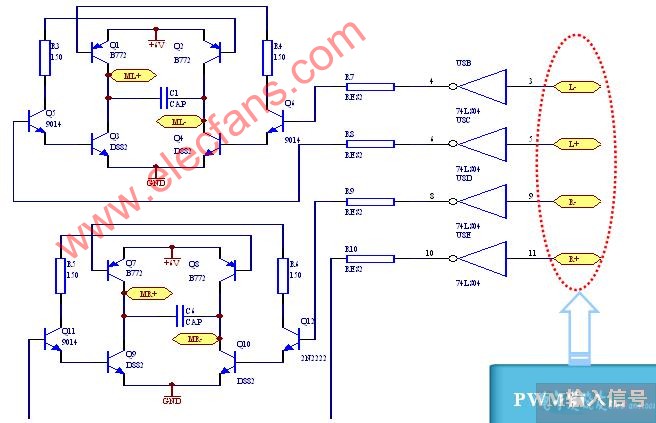
雙極性步進(jìn)電機(jī)的驅(qū)動(dòng)電路如圖所示,它會(huì)使用八顆晶體管來驅(qū)動(dòng)兩組相位。雙極性驅(qū)動(dòng)電路可以同時(shí)驅(qū)動(dòng)四線式或六線式步進(jìn)電機(jī),雖然四線式電機(jī)只能使用雙極性驅(qū)動(dòng)電路,它卻能大幅降低量產(chǎn)型應(yīng)用的成本。雙極性步進(jìn)電機(jī)驅(qū)動(dòng)電路的晶體管數(shù)目是單極性驅(qū)動(dòng)電路的兩倍,其中四顆下端晶體管通常是由微控制器直接驅(qū)動(dòng),上端晶體管則需要成本較高的上端驅(qū)動(dòng)電路。雙極性驅(qū)動(dòng)電路的晶體管只需承受電機(jī)電壓,所以它不像單極性驅(qū)動(dòng)電路一樣需要箝位電路。
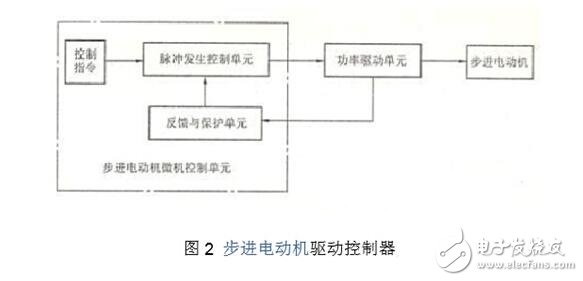
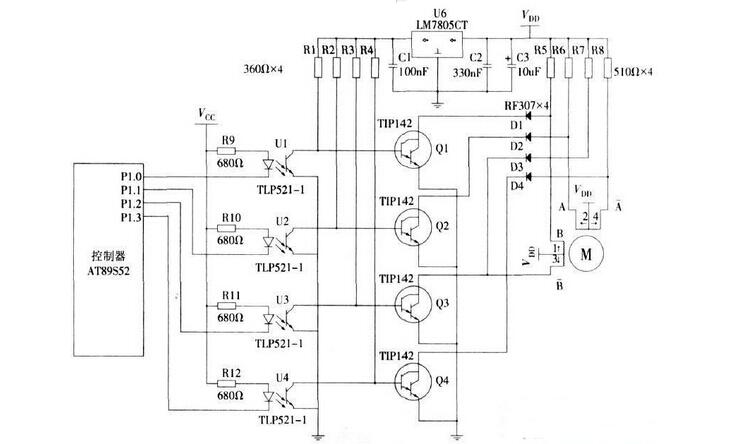
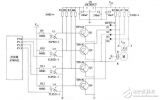
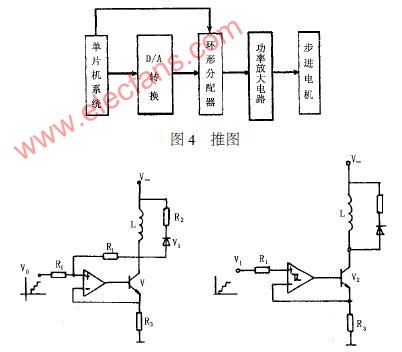
步進(jìn)電動(dòng)機(jī)不能直接接到工頻交流或直流電源上工作,而必須使用專用的步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)器,如圖2所示,它由脈沖發(fā)生控制單元、功率驅(qū)動(dòng)單元、保護(hù)單元等組成。圖中點(diǎn)劃線所包圍的二個(gè)單元可以用微機(jī)控制來實(shí)現(xiàn)。驅(qū)動(dòng)單元與步進(jìn)電動(dòng)機(jī)直接耦合,也可理解成步進(jìn)電動(dòng)機(jī)微機(jī)控制器的功率接口,這里予以簡(jiǎn)單介紹。
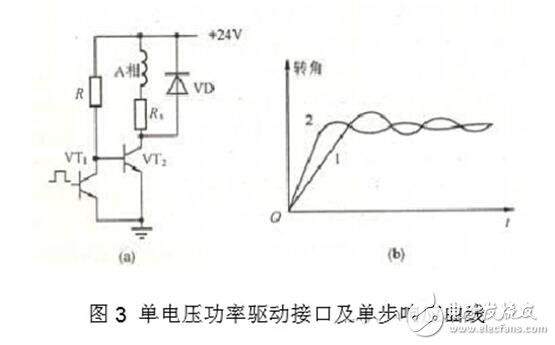
1. 單電壓功率驅(qū)動(dòng)接口
實(shí)用電路如圖3所示。在電機(jī)繞組回路中串有電阻Rs,使電機(jī)回路時(shí)間常數(shù)減小,高頻時(shí)電機(jī)能產(chǎn)生較大的電磁轉(zhuǎn)矩,還能緩解電機(jī)的低頻共振現(xiàn)象,但它引起附加的損耗。一般情況下,簡(jiǎn)單單電壓驅(qū)動(dòng)線路中,Rs是不可缺少的。Rs對(duì)步進(jìn)電動(dòng)機(jī)單步響應(yīng)的改善如圖3(b)。
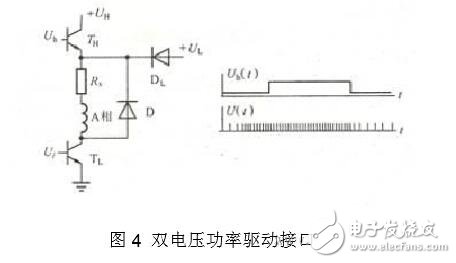
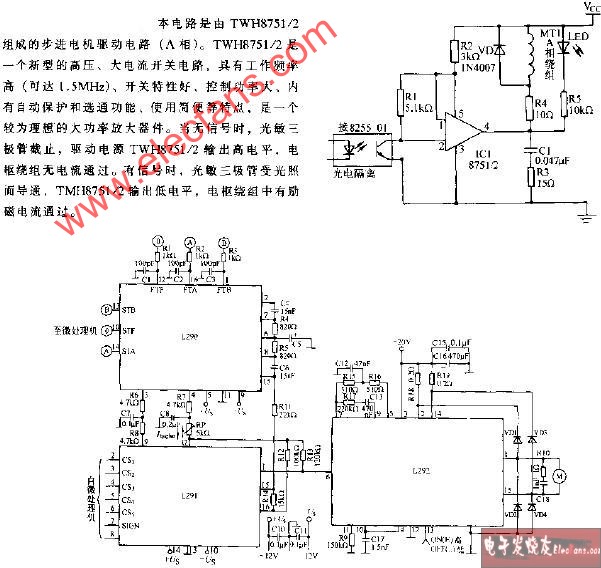
雙電壓驅(qū)動(dòng)的功率接口如圖4所示。雙電壓驅(qū)動(dòng)的基本思路是在較低(低頻段)用較低的電壓UL驅(qū)動(dòng),而在高速(高頻段)時(shí)用較高的電壓UH驅(qū)動(dòng)。這種功率接口需要兩個(gè)控制信號(hào),Uh為高壓有效控制信號(hào),U為脈沖調(diào)寬驅(qū)動(dòng)控制信號(hào)。圖中,功率管TH和二極管DL構(gòu)成電源轉(zhuǎn)換電路。當(dāng)Uh低電平,TH關(guān)斷,DL正偏置,低電壓UL對(duì)繞組供電。反之Uh高電平,TH導(dǎo)通,DL反偏,高電壓UH對(duì)繞組供電。這種電路可使電機(jī)在高頻段也有較大出力,而靜止鎖定時(shí)功耗減小。
3.高低壓功率驅(qū)動(dòng)接口
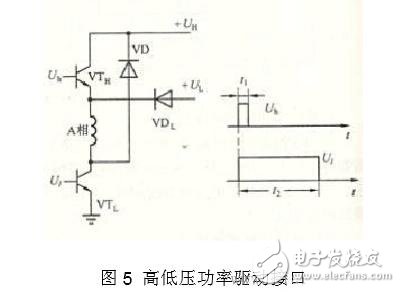
高低壓功率驅(qū)動(dòng)接口如圖5所示。高低壓驅(qū)動(dòng)的設(shè)計(jì)思想是,不論電機(jī)工作頻率如何,均利用高電壓UH供電來提高導(dǎo)通相繞組的電流前沿,而在前沿過后,用低電壓UL來維持繞組的電流。這一作用同樣改善了驅(qū)動(dòng)器的高頻性能,而且不必再串聯(lián)電阻Rs,消除了附加損耗。高低壓驅(qū)動(dòng)功率接口也有兩個(gè)輸入控制信號(hào)Uh和Ul,它們應(yīng)保持同步,且前沿在同一時(shí)刻跳變,如圖5所示。圖中,高壓管VTH的導(dǎo)通時(shí)間tl不能太大,也不能太小,太大時(shí),電機(jī)電流過載;太小時(shí),動(dòng)態(tài)性能改善不明顯。一般可取1~3ms。(當(dāng)這個(gè)數(shù)值與電機(jī)的電氣時(shí)間常數(shù)相當(dāng)時(shí)比較合適)。{{分頁(yè)}}
4.斬波恒流功率驅(qū)動(dòng)接口
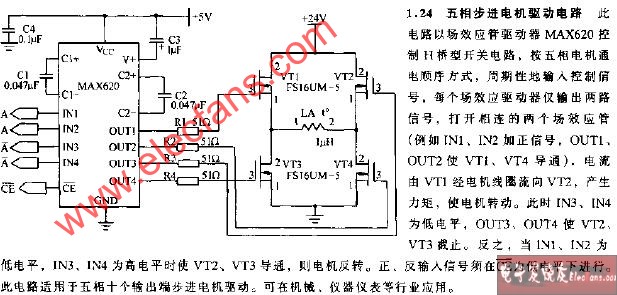
恒流驅(qū)動(dòng)的設(shè)計(jì)思想是,設(shè)法使導(dǎo)通相繞組的電流不論在鎖定、低頻、高頻工作時(shí)均保持固定數(shù)值。使電機(jī)具有恒轉(zhuǎn)矩輸出特性。這是目前使用較多、效果較好的一種功率接口。圖6是斬波恒流功率接口原理圖。圖中R是一個(gè)用于電流采樣的小阻值電阻,稱為采樣電阻。當(dāng)電流不大時(shí),VT1和VT2同時(shí)受控于走步脈沖,當(dāng)電流超過恒流給定的數(shù)值,VT2被封鎖,電源U被切除。由于電機(jī)繞組具有較大電感,此時(shí)靠二極管VD續(xù)流,維持繞組電流,電機(jī)靠消耗電感中的磁場(chǎng)能量產(chǎn)生出力。此時(shí)電流將按指數(shù)曲線衰減,同樣電流采樣值將減小。當(dāng)電流小于恒流給定的數(shù)值,VT2導(dǎo)通,電源再次接通。如此反復(fù),電機(jī)繞組電流就穩(wěn)定在由給定電平所決定的數(shù)值上,形成小小的鋸齒波,如圖6所示。
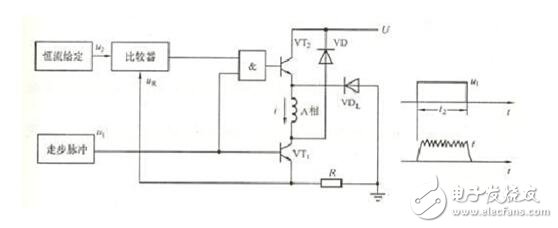
斬波恒流功率驅(qū)動(dòng)接口也有兩個(gè)輸入控制信號(hào),其中u1是數(shù)字脈沖,u2是模擬信號(hào)。這種功率接口的特點(diǎn)是:高頻響應(yīng)大大提高,接近恒轉(zhuǎn)矩輸出特性,共振現(xiàn)象消除,但線路較復(fù)雜。目前已有相應(yīng)的集成功率模塊可供采用。
5.升頻升壓功率驅(qū)動(dòng)接口
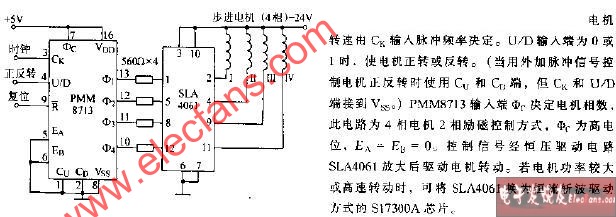
為了進(jìn)一步提高驅(qū)動(dòng)系統(tǒng)的高頻響應(yīng),可采用升頻升壓功率驅(qū)動(dòng)接口。這種接口對(duì)繞組提供的電壓與電機(jī)的運(yùn)行頻率成線性關(guān)系。它的主回路實(shí)際上是一個(gè)開關(guān)穩(wěn)壓電源,利用頻率-電壓變換器,將驅(qū)動(dòng)脈沖的頻率轉(zhuǎn)換成直流電平,并用此電平去控制開關(guān)穩(wěn)壓電源的輸入,這就構(gòu)成了具有頻率反饋的功率驅(qū)動(dòng)接口。
6.集成功率驅(qū)動(dòng)接口
目前已有多種用于小功率步進(jìn)電動(dòng)機(jī)的集成功率驅(qū)動(dòng)接口電路可供選用。
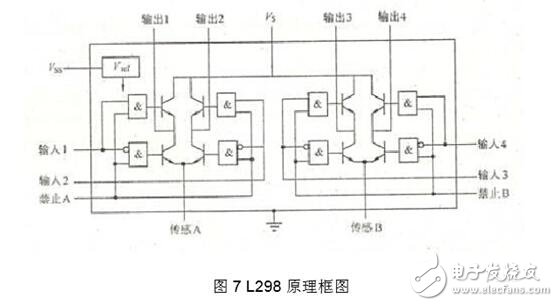
L298芯片是一種H橋式驅(qū)動(dòng)器,它設(shè)計(jì)成接受標(biāo)準(zhǔn)TTL邏輯電平信號(hào),可用來驅(qū)動(dòng)電感性負(fù)載。H橋可承受46V電壓,相電流高達(dá)2.5A。L298(或XQ298,SGS298)的邏輯電路使用5V電源,功放級(jí)使用5~46V電壓,下橋發(fā)射極均單獨(dú)引出,以便接入電流取樣電阻。L298(等)采用15腳雙列直插小瓦數(shù)式封裝,工業(yè)品等級(jí)。它的內(nèi)部結(jié)構(gòu)如圖7所示。H橋驅(qū)動(dòng)的主要特點(diǎn)是能夠?qū)﹄姍C(jī)繞組進(jìn)行正、反兩個(gè)方向通電。L298特別適用于對(duì)二相或四相步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)。{{分頁(yè)}}
與L298類似的電路還有TER公司的3717,它是單H橋電路。SGS公司的SG3635則是單橋臂電路,IR公司的IR2130則是三相橋電路,Allegro公司則有A2916、A3953等小功率驅(qū)動(dòng)模塊。
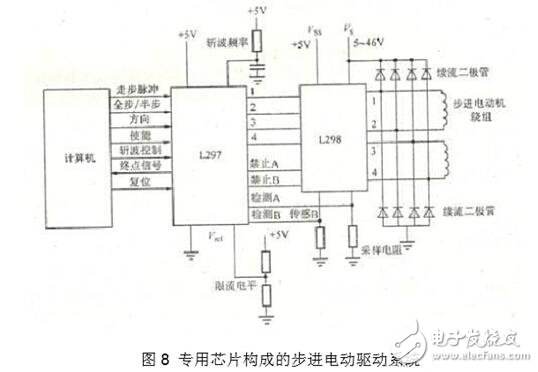
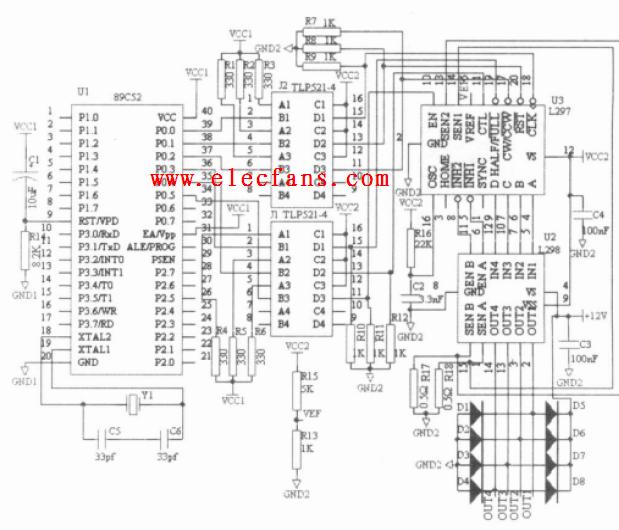
圖8是使用L297(環(huán)形分配器專用芯片)和L298構(gòu)成的具有恒流斬波功能的步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)系統(tǒng)。
步進(jìn)電機(jī)驅(qū)動(dòng)電路的性能比較及電路實(shí)例
1、性能比較
比較上述驅(qū)動(dòng)電路的
基本性能可概括如下。
(1)單極性驅(qū)動(dòng)電路:這里指單電源、單極性驅(qū)動(dòng)電路,每相只用一只功率管。線路簡(jiǎn)單、成本低,但效率也低,啟動(dòng)和運(yùn)行頻率均不高。現(xiàn)常用來驅(qū)動(dòng)小功率步進(jìn)電機(jī)。
(2)雙極性驅(qū)動(dòng)電路:線路復(fù)雜,效率高。常用來驅(qū)動(dòng)永磁式電機(jī)、混合式電機(jī)或大功率電機(jī)。
(3)高低壓驅(qū)動(dòng)電路:線路較簡(jiǎn)單。雙電源,每相需要兩只功率管。效率較高,啟動(dòng)和運(yùn)行頻率比單極性電路高。
(4)斬波驅(qū)動(dòng)電路:雙電源成高壓?jiǎn)坞娫础_\(yùn)行特性好,效率高,但線路復(fù)雜。
(5)調(diào)頻調(diào)壓驅(qū)動(dòng)電路:控制電路較復(fù)雜。因?yàn)閂隨f改變,所以,效率、運(yùn)行特性等都有了明顯改善。
(6)細(xì)分驅(qū)動(dòng)電路:線路復(fù)雜。運(yùn)行特性好。微機(jī)的應(yīng)用已使它成為很有發(fā)展前途的驅(qū)動(dòng)方式之一。
2、驅(qū)動(dòng)電路實(shí)例
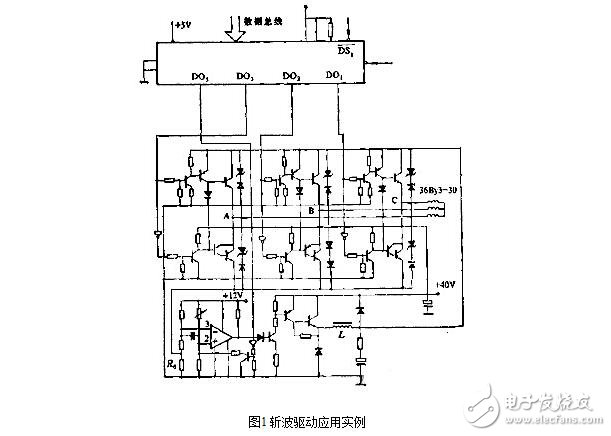
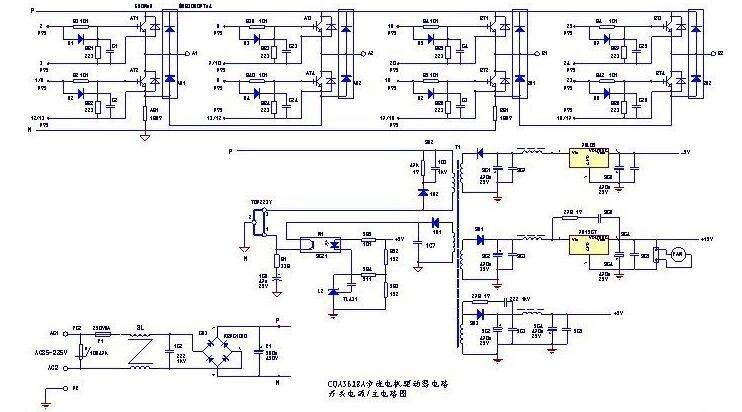
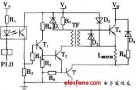
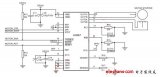
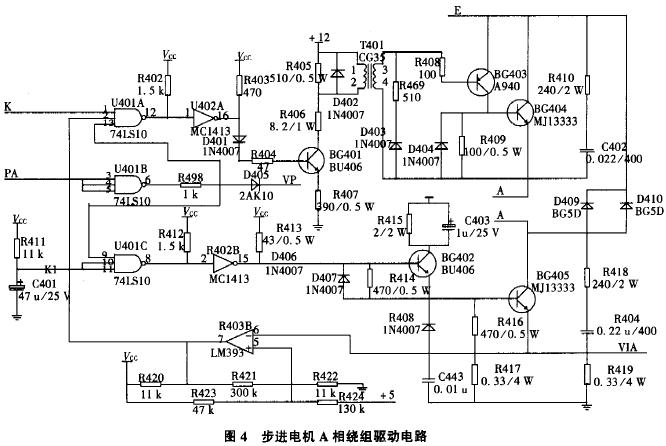
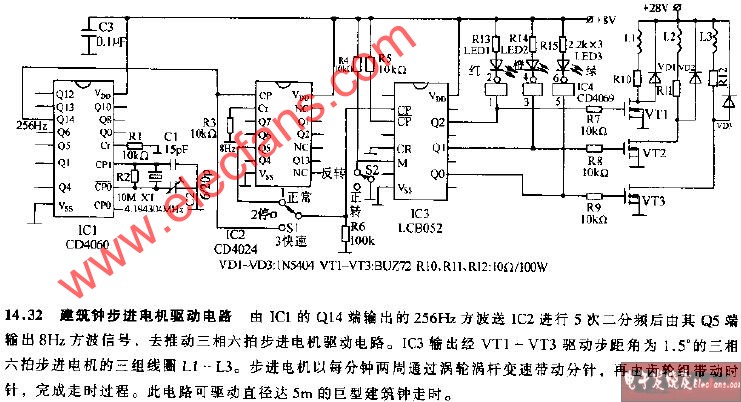
(1) 圖1是斬波驅(qū)動(dòng)的一個(gè)應(yīng)用實(shí)例。被驅(qū)動(dòng)的電機(jī)是36By3-30型三相步進(jìn)電機(jī)。它的A、B、C三相分別接在圖示電路的A、B、C端。A、B、C三端的輸入分別接電路的D03、D02、DO1。
該電路有兩種工作狀態(tài):(1)步進(jìn)方式;(2)維持方式。處在步進(jìn)工作方式時(shí),流過取樣電阻R0和相繞組上的電流為2A;處在維持方式時(shí),僅為0.5A。工作方式的轉(zhuǎn)換受程序控制。該程序送“1”給DO5時(shí),則為步進(jìn)方式。送“0”時(shí),為維持方式。
實(shí)際上,是用DO5電位的高低改變比較器比較基準(zhǔn)端“2”的電位。DO5電位高,“2”端電位抬高,則比較器“3”端的翻轉(zhuǎn)電位也隨之提高。即取樣
電阻R0上的電壓隨之提高,流過R0的平均電流相應(yīng)增大。反之,‘2”端電位降低,流過R0的平均電流相應(yīng)減小。
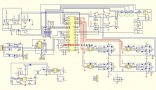
斬波驅(qū)動(dòng)由比較器、比較器后面的放大電路、L、C、R等電路形成。假設(shè)比較器的“3”端電位高于“2”端,它的輸出為低電位。由三極管組成的放大電路截止,加到相繞組上的電壓逐步衰減,流過R0上的電流和iR0也隨之降低。經(jīng)過一定時(shí)間后,“3”端電位低于“2”端。經(jīng)比較器比較后,輸出高電位。(http://www.diangon.com/版權(quán)所有)放大電路的輸出電壓升高。流過取樣電阻R0上的電流以回路時(shí)間常數(shù)所決定的規(guī)律逐步上升,R0上的壓降iR0也隨之上升。當(dāng)“3” 端電位再一次高于“2”端時(shí),比較器的輸出再次變低。如此循環(huán),形成斬波輸出。
驅(qū)動(dòng)電路的另外3個(gè)輸入端DO1、D02、D03受程序控制,用來決定步進(jìn)電機(jī)的正反向旋轉(zhuǎn)。正轉(zhuǎn)時(shí),以ABC→ABC→ABC→ABC→ABC→ABC→ABC→…方式工作;反轉(zhuǎn)時(shí),以ABC→ABC→ABC→ABC→ABC→ABC→ABC→…方式工作。
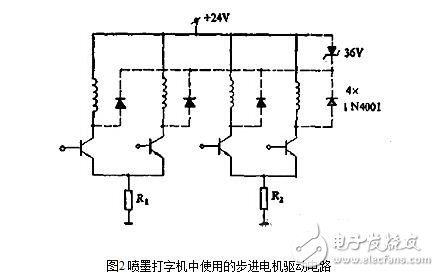
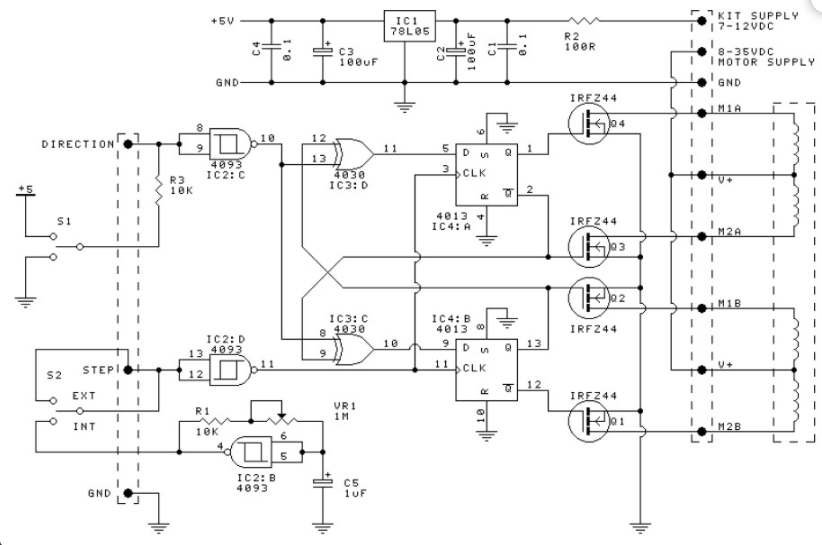
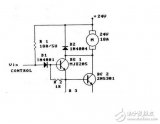
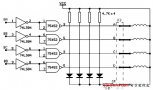
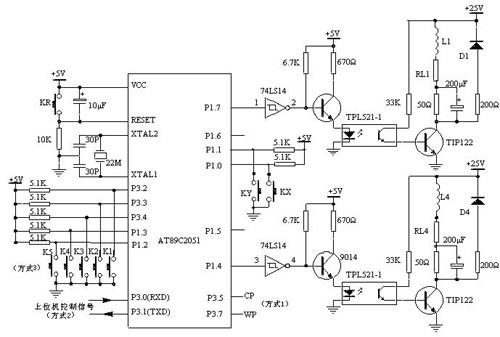
(2)圖2是噴墨打字機(jī)中使用的驅(qū)動(dòng)電路。被驅(qū)動(dòng)的是四相步進(jìn)電機(jī),步距角為3.6°。驅(qū)動(dòng)電路由四只二極管、四只晶體管、兩組雙線繞組、兩只限流電阻和一只36V穩(wěn)壓管組成。穩(wěn)壓管以圖示方式與二極管串聯(lián)后,并聯(lián)在線圈兩端。這種方式與單純并二極甘或并二極管-電阻相比,能在晶體管截止之后,使回路電流衰減得更迅速。除此之外,截止后,加在集電極上的最高電壓是電源電壓加穩(wěn)壓管的穩(wěn)定電壓,而與電流無關(guān)。在圖示電路中,為60V。這使得決定最
大集電極電壓的額定值變得很容易。圖中的串聯(lián)電阻主要是為了迅速建立激磁電流和改善轉(zhuǎn)矩特性而設(shè)。設(shè)繞組電阻為Rw,串聯(lián)電阻為R;則串聯(lián)R后,電路的時(shí)間常數(shù)將從L/Rw減少為L(zhǎng)/(Rw+R)。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論