 電子發燒友App
電子發燒友App


步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為步進電機供電,步進電機才能正常工作,驅動器就是為步進電機分時供電的,多相時序控制器。雖然步進電機已被廣泛地應用,但步進電機并不能像普通的直流電機,交流電機在常規下使用。它必須由雙環形脈沖信號、功率驅動電路等組成控制系統方可使用。因此用好步進電機卻非易事,它涉及到機械、電機、電子及計算機等許多專業知識。步進電機作為執行元件,是機電一體化的關鍵產品之一,廣泛應用在各種自動化控制系統中。隨著微電子和計算機技術的發展,步進電機的需求量與日俱增,在各個國民經濟領域都有應用。
步進電機的硬件電路設計
1、單片機的選擇
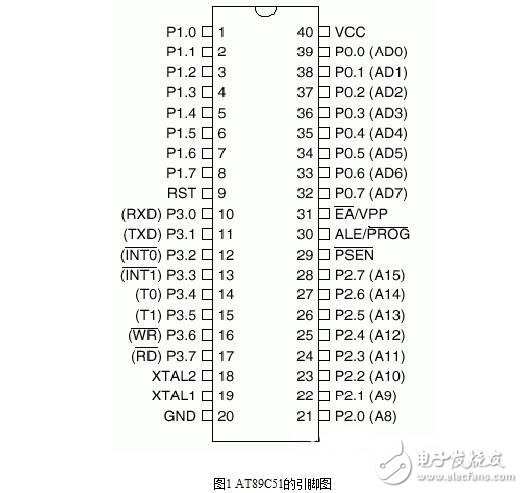
本次設計以CPU選用89C5l作為步進電機的控制芯片.89C51的結構簡單并可以在編程器上實現閃爍式的電擦寫達幾萬次以上.使用方便等優點,而且完全兼容MCS5l系列單片機的所有功能。AT89C51是一種帶4K字節閃爍可編程可擦除只讀存儲器(FPEROM—FAlsh ProgrAmmABle And ErAsABle ReAd Only Memory)的低電壓,高性能CMOS8位微處理器,俗稱單片機。該器件采用ATMEL高密度非易失存儲器制造技術制造,與工業標準的MCS-51指令集和輸出管腳相兼容。由于將多功能8位CPU和閃爍存儲器組合在單個芯片中,ATMEL的AT89C51是一種高效微控制器,為很多嵌入式控制系統提供了一種靈活性高且價廉的方案
1.1單片機的引腳功能:
(1)VCC(40):電源+5V。
(2)VSS(20):接地,也就是GND。
(3)XTL1(19)和XTL2(18):振蕩電路。
單片機是一種時序電路,必須有脈沖信號才能工作,在它的內部有一個時鐘產生電路,有兩種振蕩方式,一種是內部振蕩方式,只要接上兩個電容和一個晶振即可;另一種是外部振蕩方式,采用外部振蕩方式時,需在XTL2上加外部時鐘信號(詳細的內容將在以后的課程中專門介紹)。
(4)PSEN(29):片外ROM選通信號,低電平有效。
(5)ALE/PROG(30):地址鎖存信號輸出端/EPROM編程脈沖輸入端。
(6)RST/VPD(9):復位信號輸入端/備用電源輸入端。
(7)EA/VPP(31):內/外部ROM選擇 端
(8)P0口(39-32):雙向I/O口。9.P1口(1-8):準雙向通用I/0口。
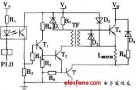
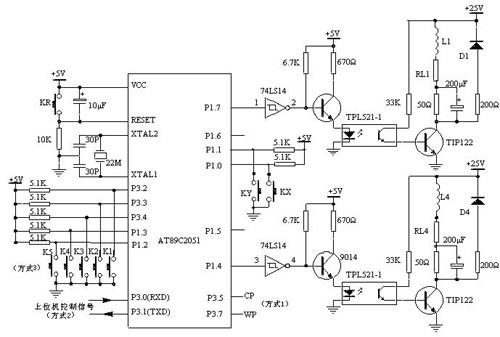
(9)P2口(21-28):準雙向I/0口。原理圖如1所示:
1.2 主要特性:
與MCS-51 兼容 4K字節可編程閃爍存儲器 壽命:1000寫/擦循環數據保留時間:全靜態工作:0Hz-24Hz三級程序存儲器鎖定、128*8位內部RAM、32可編程I/O線、兩個16位定時器/計數器、5個中斷源、可編程串行通道、低功耗的閑置和掉電模式、片內振蕩器和時鐘電路
(1) 振蕩器特性:
XTAL1和XTAL2分別為反向放大器的輸入和輸出。該反向放大器可以配置為片內振蕩器。石晶振蕩和陶瓷振蕩均可采用。如采用外部時鐘源驅動器件,XTAL2應不接。有余輸入至內部時鐘信號要通過一個二分頻觸發器,因此對外部時鐘信號的脈寬無任何要求,但必須保證脈沖的高低電平要求的寬度。
(2) 芯片擦除:
整個PEROM陣列和三個鎖定位的電擦除可通過正確的控制信號組合,并保持ALE管腳處于低電平10ms 來完成。在芯片擦操作中,代碼陣列全被寫“1”且在任何非空存儲字節被重復編程以前,該操作必須被執行。
此外,AT89C51設有穩態邏輯,可以在低到零頻率的條件下靜態邏輯,支持兩種軟件可選的掉電模式。在閑置模式下,CPU停止工作。但RAM定時器,計數器,串口和中斷系統仍在工作。在掉電模式下,保存RAM的內容并且凍結振蕩器,禁止所用其他芯片功能,直到下一個硬件復位為止。
2、步進電機的選擇
因本次設計的要求,步進電機的應選用三相三拍的步進電機,關于步進電機的具體說明如下;
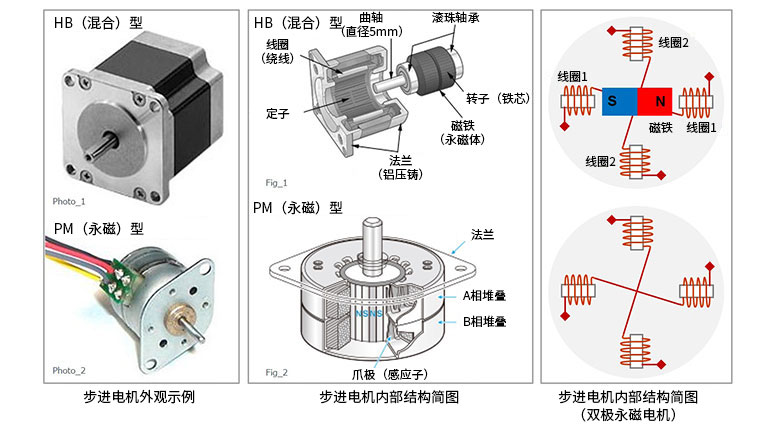
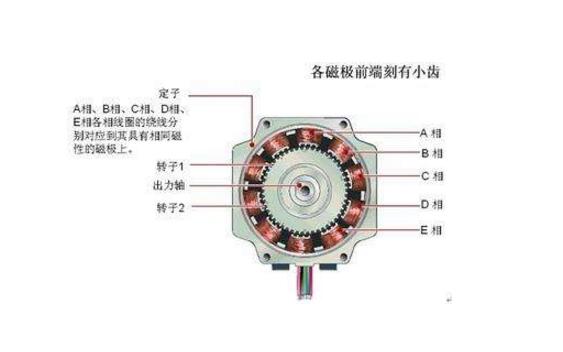
反應式步進電動機是利用凸極轉子交軸磁阻與直軸磁阻之差所產生的反應轉矩而轉動的所以也稱為磁阻式步進電動機現以一個最簡單的三相反應式步進電動機為例說明其工作原理。
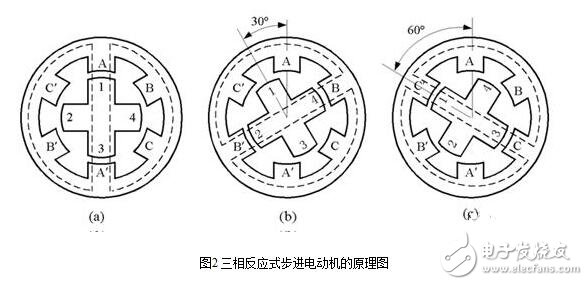
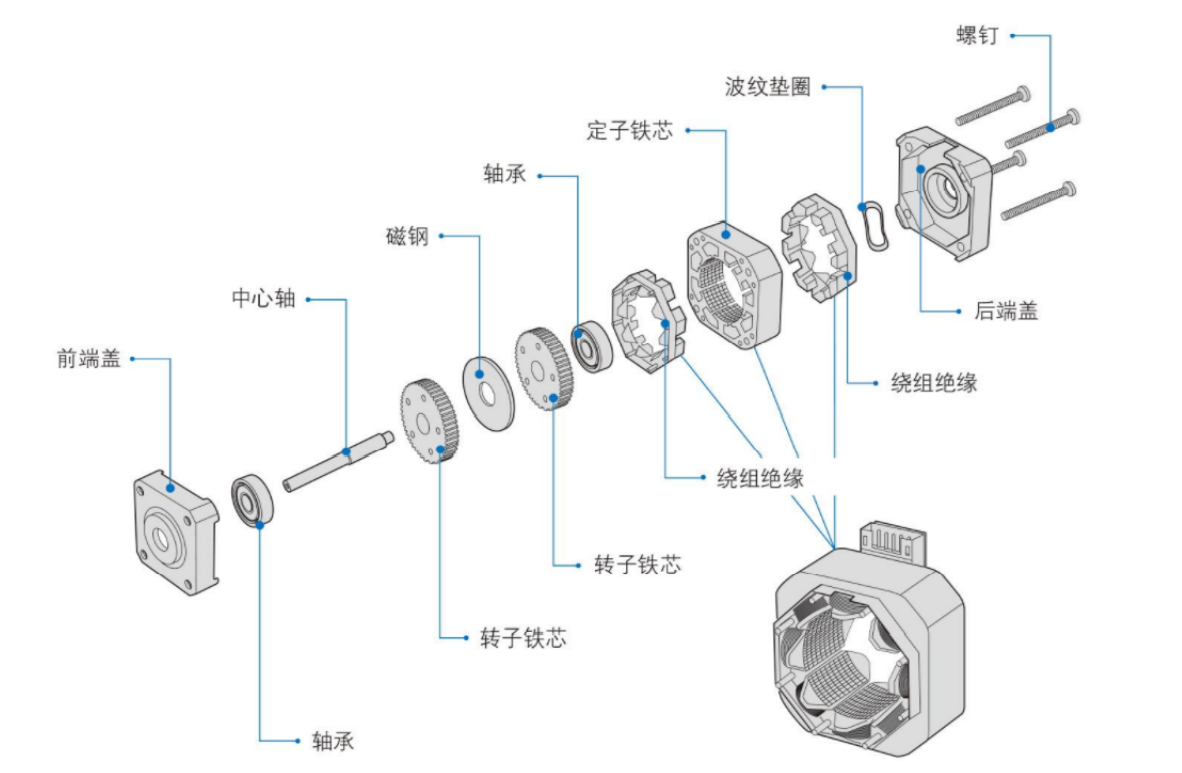
圖2是一臺三相反應式步進電動機的原理圖定子鐵芯為凸極式共有三對六個磁極每兩個相對的磁極上繞有一相控制繞組轉子用軟磁性材料制成也是凸極結構只有四個齒齒寬等于定子的極靴寬下面通過幾種基本的控制方式來說明其工作原理。
2.1 三相單三拍通電方式
當A 相控制繞組通電,其余兩相均不通電,電機內建立以定子A 相極為軸線的磁場。由于磁通具有力圖走磁阻最小路徑的特點,使轉子齒1, 3 的軸線與定子A 相極軸線對齊,如圖4 (A)所示。若A 相控制繞組斷電,B 相控制繞組通電時,轉子在反應轉矩的作用下,逆時針方向轉過30,°使轉子齒2,4 的軸線與定子B 相極軸線對齊,即轉子走了一步,如圖4(B)所示, 若再斷開B相,使C相控制繞組通電,轉子又轉過30° 使轉子齒1,3 的軸線與定子C相極軸線對齊,如圖4(C)所示。如此按A-B–C-A 的順序輪流通電,轉子就會一步一步地按逆時針方向轉動,其轉速取決于各相控制繞組通電與斷電的頻率,旋轉方向取決于控制繞組輪流通電的順序若按A-C-B-A 的順序通電,則電機按順時針反方向轉動。
上述通電方式稱為三相單三拍運行,”三相”是指三相步進電動機,”單”是指每次只有一相控制繞組通電,控制繞組每改變一次通電方式稱為一拍,三拍是指經過三次改變通電方式為一個循環,我們稱每一拍轉子轉過的角度為步距角。三相單三拍運行時的步距角為30度。其原理圖如2所示:
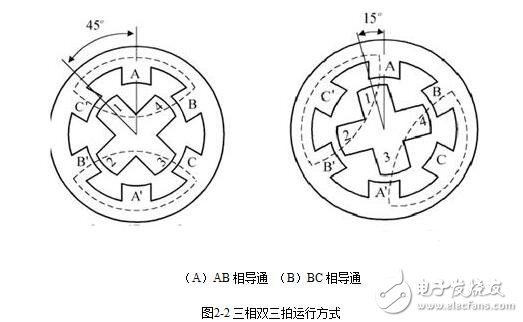
2.2 三相雙三拍通電方式
控制繞組的通電方式為AB-BC-CA-AB 或AB-CA-BC-AB 每拍同時有兩相繞組通電三拍為一個循環,當A B 兩相控制繞組同時通電時轉子齒的位置應同時考慮到兩對定子極的作用,只有A 相極和B 相極對轉子齒所產生的磁拉力相平衡才是轉子的平衡位置如2-2 B 所示,可見雙三拍運行時的步距角仍是30°,但雙三拍運行時每一拍總有一相繞組持續通電,例如由A B 兩相通電變為B C 兩相通電時,B 相保持持續通電狀態C 相磁拉力圖使轉子逆時針方向轉動,而B 相磁拉力卻起有阻止轉子繼續向前轉動的作用。即起到一定的電磁阻尼作用所以電機工作比較平穩,而在三相單三拍運行時由于沒有這種阻尼作用,所以轉子達到新的平衡位置容易產生振蕩穩定性不如雙三拍運行方式。三相雙三拍運行方式AB相與BC相導通的結構如圖2-2所示:
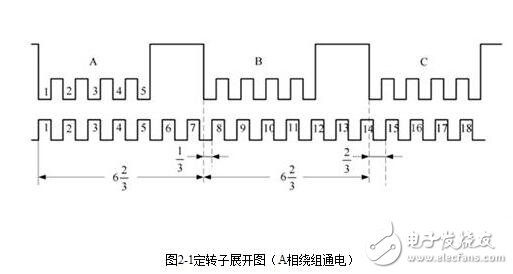
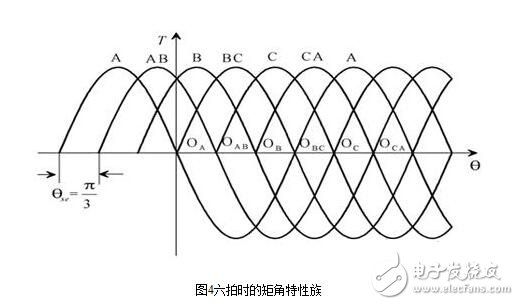
在分析步進電動機動態運行時,不僅要知道某一相控制繞組通電時的矩角特性,而且要知道整個運行過程中各相控制繞組通電狀態下的矩角特性,即所謂矩角特性族以三相單三拍的通電方式為例,若將失調角θ的坐標軸統一取在A 相磁極的軸線上,顯然A 相通電時矩角特性如圖3中曲線A 所示穩定平衡點為O,點B 相通電時轉子轉過1/3 齒距相當于轉過2π/3 電角度,它的穩4-3中曲線C, 這三條曲線就構成了三相單三拍通電方式時的矩角特性族總之矩角特性族中的每一條曲線依次錯開一個用電角度表示的步矩角![]()
同理可得到三相單雙六拍通電方式時的矩角特性族如圖4與5 所示:

步進電機的動態特性是指步進電動機在運行過程中的特性它直接影響系統工作的可靠性和系統的快速反應。
(1)單步運行狀態
單步運行狀態是指步進電動機在一相或多相控制繞組通電狀態下僅改變一次通電狀態時的運行方式。
(2)動穩定區
當A 相控制繞組通電時矩角特性如圖中的曲線A 所示,若步進電動機為理想空載則轉子處于穩定平衡點![]() 處,如果將A相通電改變為B相通電,那么矩角特性應向前移動一個步距角
處,如果將A相通電改變為B相通電,那么矩角特性應向前移動一個步距角![]() 變為曲線B,
變為曲線B,![]() 點為新的穩定平衡點由于在改變通電狀態的初瞬轉子位置來不及改變還處于θ=0的位置,對應的電磁轉矩卻由O 突變為曲
點為新的穩定平衡點由于在改變通電狀態的初瞬轉子位置來不及改變還處于θ=0的位置,對應的電磁轉矩卻由O 突變為曲![]() 線B上的C 點,電機在該轉矩的作用下轉子向新的穩定平衡位置,移動直至到達
線B上的C 點,電機在該轉矩的作用下轉子向新的穩定平衡位置,移動直至到達![]() 點為止對應它的靜穩定區為止,(-π+
點為止對應它的靜穩定區為止,(-π+![]() )《θ 《(π+
)《θ 《(π+![]() ), 即改變通電狀態的瞬間只要轉子在這個區域內就能趨向新的穩定平衡位置,因此把后一個通電相的靜穩定區稱為前一個通電相的動穩定區,把初始穩定平衡點OA 與動穩定區的邊界點A 之間的距離稱為穩定裕度,拍數越多步距角越小,動穩定區就越接近靜穩定區穩定裕度越大,運行的穩定性越好轉子從原來的穩定平衡點到達新的穩定平衡點的時間越短,能夠響應的頻率也就越高。原理圖如5所示:
), 即改變通電狀態的瞬間只要轉子在這個區域內就能趨向新的穩定平衡位置,因此把后一個通電相的靜穩定區稱為前一個通電相的動穩定區,把初始穩定平衡點OA 與動穩定區的邊界點A 之間的距離稱為穩定裕度,拍數越多步距角越小,動穩定區就越接近靜穩定區穩定裕度越大,運行的穩定性越好轉子從原來的穩定平衡點到達新的穩定平衡點的時間越短,能夠響應的頻率也就越高。原理圖如5所示:

圖5 穩定響應曲線
(3)最大負載能力
步進電動機帶恒定負載時負載轉矩為![]() * MERGEFORMAT ,
* MERGEFORMAT ,![]() * MERGEFORMAT 若A 相控制繞組通電則轉子的穩定平衡位置為圖 A中曲線A 上的
* MERGEFORMAT 若A 相控制繞組通電則轉子的穩定平衡位置為圖 A中曲線A 上的![]() * MERGEFORMAT 點,這一點的電磁轉矩正好與負載轉矩相平衡,當輸入一個控制脈沖信號通電狀態由A相改變為B 相,矩角特性變為曲線B 在改變通電狀態的瞬間電機產生的電磁轉矩
* MERGEFORMAT 點,這一點的電磁轉矩正好與負載轉矩相平衡,當輸入一個控制脈沖信號通電狀態由A相改變為B 相,矩角特性變為曲線B 在改變通電狀態的瞬間電機產生的電磁轉矩![]() * MERGEFORMAT 大于負載轉矩
* MERGEFORMAT 大于負載轉矩![]() * MERGEFORMAT ,電機在該轉矩的作用下轉過一個步距角到達新的穩定平衡點OB′,如圖6所示:
* MERGEFORMAT ,電機在該轉矩的作用下轉過一個步距角到達新的穩定平衡點OB′,如圖6所示:
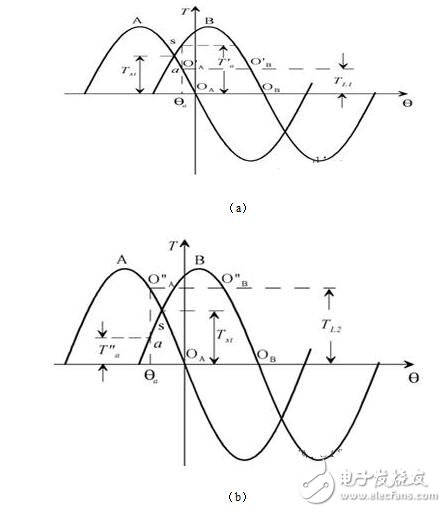
圖6 最大負載轉矩的確定
(a) ![]() (b)
(b) ![]()
如果負載轉矩增大為![]() * MERGEFORMAT ,且
* MERGEFORMAT ,且![]() ,如圖4-14(B)則初始平衡位置為
,如圖4-14(B)則初始平衡位置為![]() * MERGEFORMAT 點,但在改變通電狀態的瞬間電機產生電磁轉矩為
* MERGEFORMAT 點,但在改變通電狀態的瞬間電機產生電磁轉矩為![]() ,由于
,由于![]() ,轉子不能到達新的穩定平衡位置點
,轉子不能到達新的穩定平衡位置點![]() ,而是向失調角θ減小的方向滑動,電機不能帶動負載作步進運行,這時步進電動機實際上是處于失控狀態,由此可見只有負載轉矩小于相鄰兩個矩角特性交點S 所對應的電磁轉矩
,而是向失調角θ減小的方向滑動,電機不能帶動負載作步進運行,這時步進電動機實際上是處于失控狀態,由此可見只有負載轉矩小于相鄰兩個矩角特性交點S 所對應的電磁轉矩![]() 才能保證電機正常的步進運行,把
才能保證電機正常的步進運行,把![]() 稱為最大負載轉矩也稱為啟動轉矩當然它比最大靜轉矩
稱為最大負載轉矩也稱為啟動轉矩當然它比最大靜轉矩![]() 可求得啟動轉矩公式2-1。
可求得啟動轉矩公式2-1。

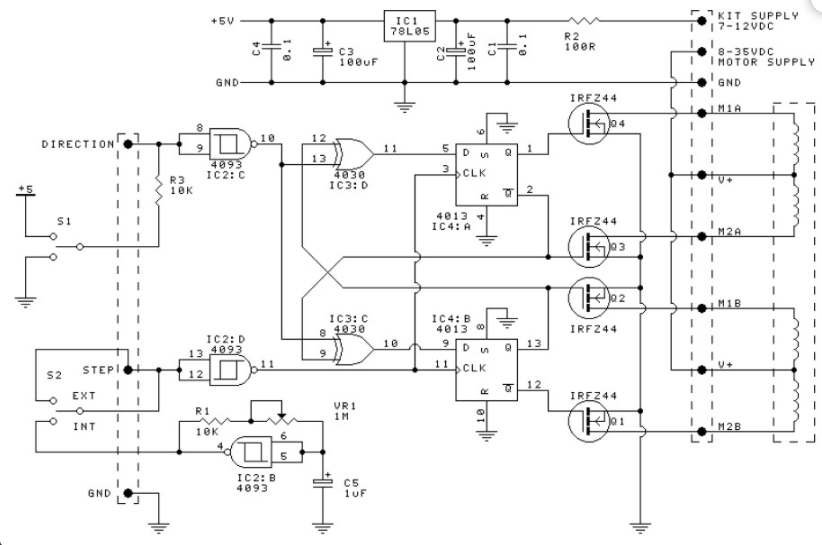
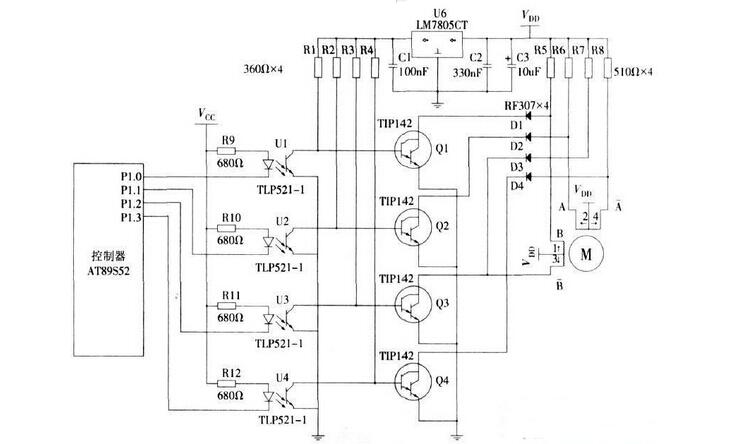
步進電機的驅動原理及方法
步進電機的驅動原理
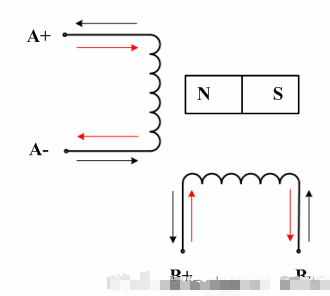
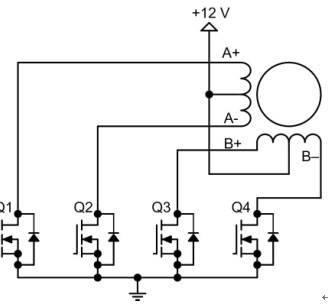
關于步進電機的驅動機械裝置,用簡單的構造圖簡易說明,在圖1 是為了要說明步進電機驅動原理的構造圖,在固定架構上有4個電磁鐵并列這,它的下方有一個可動磁鐵對向這,而且,在磁鐵的下側上裝置了引導滾輪作直線狀的引導軸,沿這左、右移動的構造。

如此,在此對步進電動機的動作順道追加說明,現在,電磁鐵L1和可動磁鐵Mg之間相互作用產生的磁氣吸引力,因而在這里場合,(a)部的位置滑動部產生靜止作用,其次是電磁鐵L2激磁時,剛才的電磁鐵L1 OFF,由于如此可動磁鐵就被吸引附在電磁鐵L2的位置上,就成為在(b)的位置上,更進一步的在電磁鐵L3受激磁時,剛才的電磁鐵L2 OFF,由于如此可動磁鐵就移動至電磁鐵L3的位置為止,就成為在(c)的位置上。
以下,依照這各動作而反復的操作,可動磁鐵就會向箭頭方向移動,因而,依照像這種動作順次的操作下,可以實現出一種致動器(在此為直線運動),還有,在此所使用的電磁鐵L1~L4,在任何可動磁鐵(Mg)側上,都以產生N極的電流流通。
而且,在此所說的構造圖并不是只能有4個電磁鐵而已,在必要上也可增加它的對應數。
圖1的電機為直線型運動,總之就是屬于線性步進電機,因而,就如這樣并不能成為轉型的情況,如此,為了要成為轉型就必須下些功夫,圖2為了要使剛才線性型的構造成為旋轉型的總結,所以它的驅動原理在本質上和剛才的直線運動型一樣。

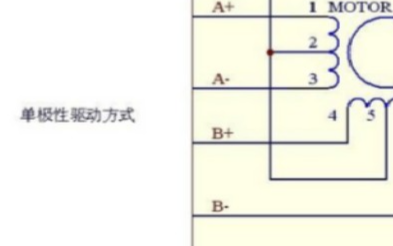
步進電機的5種驅動方法
1. 恒電壓驅動
單電壓驅動是指在電機繞組工作過程中,只用一個方向電壓對繞組供電,多個繞組交替提供電壓。該方式是一種比較老的驅動方式,現在基本不用了。
優點:電路簡單,元件少、控制也簡單,實現起來比較簡單
缺點:必須提供足夠大的電流的三極管來進行開關處理,步進電機運轉速度比較低,電機震動比較大,發熱大。由于已經不再使用,所以不多描述。
2. 高低壓驅動
由于恒電壓驅動存在以上諸多缺點,技術的進一步發展,研發出新的高低壓驅動來改善恒電壓驅動的部分缺點,高低壓驅動的原理是,在電機運動到整步的時候使用高壓控制,在運動到半步的時候使用低壓控制,停止時也是使用低壓來控制。
優點:高低壓控制在一點程度上改善了震動和噪音,第一次提出細分控制步進電機的概念,同時也提出了停止時電流減半的工作模式。
缺點:電路相對恒電壓驅動復雜,對三極管高頻特性要求提高,電機低速仍然震動比較大,發熱仍然比較大,現在基本上不使用這種驅動模式。
3. 自激式恒電流斬波驅動
自激式恒電流斬波驅動的工作原理是通過硬件設計當電流達到某個設定值的時候通過硬件將其電流關閉,然后轉為另一個繞組通電,另一個繞組通電的電流到某個固定的電流的時候,又能通過硬件將其關閉,如此反復,推進步進電機運轉。
優點:噪音大大減小,轉速一定程度上提高了,性能比前兩種有一定的提高。
缺點:對電路設計要求比較高,對電路抗干擾要求比較高,容易引起高頻,燒壞驅動元件,對元件性能要求比較高。
4. 電流比較斬波驅動(目前市場上主要采用的技術)
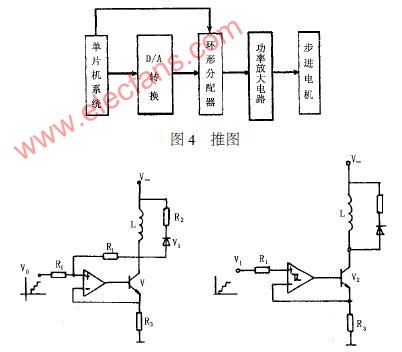
電流比較斬波驅動是把步進電機繞組電流值轉化為一定比例的電壓,與D/A轉換器輸出的預設值進行比較,比較結果來控制功率管的開關,從而達到控制繞組相電流的目的。
優點:使運動控制模擬正弦波的特點,大大提高性能,運動速度和噪音都比較小,可以使用比較高的細分,是當前流行的控制方法。
缺點:電路比較復雜,對電路中的干擾難以控制和理論要求相吻合,容易產生抖動,在控制形成正弦波的波峰和波谷,容易導致高頻干擾,進而導致驅動元件發熱或者由于頻率過高而老化,這也是很多驅動器使用1年多的時候容易出現紅燈保護的主要原因。
5. 潛進式驅動
這是一種全新的運動控制技術,該技術是在當前電流比較斬波驅動技術的前提下,克服其中的缺點而創新的一種全新的驅動方法。其核心技術是在電流比較斬波驅動的前提下增加了驅動元件發熱和高頻抑制保護技術。
優點:兼有電流比較斬波驅動的優點外,發熱特別小,使用壽命較長。
缺點:全新技術,價格比較高,目前每種步進電機和驅動器匹配要求相對比較嚴格。










 工商網監
工商網監
評論