 電子發(fā)燒友App
電子發(fā)燒友App


無刷直流電機(jī)由電動(dòng)機(jī)主體和驅(qū)動(dòng)器組成,是一種典型的機(jī)電一體化產(chǎn)品。 無刷電機(jī)是指無電刷和換向器(或集電環(huán))的電機(jī),又稱無換向器電機(jī)。早在十九紀(jì)誕生電機(jī)的時(shí)候,產(chǎn)生的實(shí)用性電機(jī)就是無刷形式,即交流鼠籠式異步電動(dòng)機(jī),這種電動(dòng)機(jī)得到了廣泛的應(yīng)用。但是,異步電動(dòng)機(jī)有許多無法克服的缺陷,以致電機(jī)技術(shù)發(fā)展緩慢。上世紀(jì)中葉誕生了晶體管,因而采用晶體管換向電路代替電刷與換向器的直流無刷電機(jī)就應(yīng)運(yùn)而生了。這種新型無刷電機(jī)稱為電子換向式直流電機(jī),它克服了第一代無刷電機(jī)的缺陷。
無刷直流電機(jī)的控制策略
一般的自同步無刷直流電動(dòng)機(jī)逆變器和驅(qū)動(dòng)的結(jié)構(gòu)圖如圖1所示。圖中所示之驅(qū)動(dòng)系統(tǒng)通常較多用于電壓源逆變器(VSI)。電壓源逆變器的對(duì)應(yīng)是電流源逆變器(CSI)。VSI之所以較為廣泛運(yùn)用是因?yàn)槠涑杀尽⒅亓俊?dòng)態(tài)性能,以及易于控制均優(yōu)于CSI。兩種逆變器重量和成本的差異是由于VSI采用電容器進(jìn)行直流耦合,而CSI須要在整流器和逆變器之間接有笨重的電抗器。VSI在動(dòng)態(tài)響應(yīng)能力上也與CSI不同。由于大的電抗器的作用就是滿足CSI作為恒流源的較大的換向重疊角的需要,防止電機(jī)繞組中電流的快速變化,抑制電機(jī)的高速伺服運(yùn)行。這就會(huì)加大驅(qū)動(dòng)系統(tǒng)中阻尼器的尺寸。對(duì)于CSI所期望得到的恒流控制和恒轉(zhuǎn)矩控制性能,在VSI中,也可通過其內(nèi)部的電流控制環(huán)中滯后型電流控制而近似得到。
術(shù)語“自同步”指的是為了定子相電流脈沖與電機(jī)各相反電勢(shì)一致所需正確的各管導(dǎo)通順序,驅(qū)動(dòng)電路對(duì)即時(shí)轉(zhuǎn)子位置信息的要求。

圖1基本的無刷直流電動(dòng)機(jī)驅(qū)動(dòng)
圖2是無刷直流電動(dòng)機(jī)一經(jīng)典的位置和轉(zhuǎn)速控制方案的方框圖。如果僅僅期望轉(zhuǎn)速控制,可以將位置控制器和位置反饋電路去掉。通常在高性能的位置控制器中位置和轉(zhuǎn)速傳感器都是需要的。如果僅有位置傳感器而沒有轉(zhuǎn)速傳感器,那就要求檢測(cè)位置信號(hào)的差異,在模擬系統(tǒng)中就要導(dǎo)致噪聲的放大;而在數(shù)字系統(tǒng)中這不是問題。對(duì)于位置和轉(zhuǎn)速控制的無刷直流電動(dòng)機(jī),位置傳感器或者是其他獲取轉(zhuǎn)子位置信息的元件是一定要的。

圖2經(jīng)典轉(zhuǎn)速和位置控制無刷直流電動(dòng)機(jī)系統(tǒng)方框圖
許多高性能的應(yīng)用場(chǎng)合為了轉(zhuǎn)矩控制還需要電流反饋。至少,需要匯線電流反饋來防止電機(jī)和驅(qū)動(dòng)系統(tǒng)過流。當(dāng)添加一內(nèi)電流閉環(huán)控制就能實(shí)現(xiàn)非常快的電流源逆變器那樣的性能,而不需要直流耦合電抗器,它被稱為電流調(diào)節(jié)電壓源逆變器。驅(qū)動(dòng)中的直流電壓調(diào)節(jié)也可由作用類似直流電源的可控整流器來實(shí)現(xiàn),或者既可通過在變換器中將PWM信號(hào)同時(shí)加在上下開關(guān),也可通過僅僅加在上開關(guān)或下開關(guān)來實(shí)現(xiàn)。
無刷直流電機(jī)仿人智能系統(tǒng)設(shè)計(jì)
無刷直流電機(jī)(BLDC)是一種多變量和非線性系統(tǒng),其利用電子換向器取代了機(jī)械電刷和機(jī)械換向器,因此這種電機(jī)不僅保留了直流電機(jī)的優(yōu)點(diǎn),而且又具有交流電動(dòng)機(jī)的結(jié)構(gòu)簡(jiǎn)單、運(yùn)行可靠、維護(hù)方便等優(yōu)點(diǎn),使它一經(jīng)出現(xiàn)就以極快的速度發(fā)展和普及。本文在分析了無刷直流電機(jī)數(shù)學(xué)模型的基礎(chǔ)上,建立了基于仿人智能控制的雙閉環(huán)控制系統(tǒng),轉(zhuǎn)速環(huán)采用基于速度特征狀態(tài)多模態(tài)控制的仿人智能控制算法,電流環(huán)采用傳統(tǒng)PI控制算法。
在Matlab平臺(tái)上建立了基于仿人智能控制的無刷直流電機(jī)雙閉環(huán)系統(tǒng)的仿真模型,包括仿人智能速度控制器模塊、PI電流控制器模塊、換相邏輯模塊、電流采樣模塊和電機(jī)本體模塊。通過在線調(diào)整、仿真并與其他控制算法相比較,仿真實(shí)驗(yàn)結(jié)果表明:仿人智能控制具有更好的動(dòng)、靜態(tài)性能。
隨著對(duì)控制精度以及控制系統(tǒng)的穩(wěn)態(tài)和動(dòng)態(tài)性能要求的提高,對(duì)無刷直流電機(jī)采用傳統(tǒng)的PID控制器往往難以滿足系統(tǒng)的性能要求。國(guó)內(nèi)外眾多學(xué)者在研究無刷直流電機(jī)的各種智能控制算法上取得了一定成果,然而目前無刷直流電機(jī)的各種智能控制算法還存在控制算法復(fù)雜、參數(shù)優(yōu)化等方面的問題。
仿人智能控制是直接對(duì)人的控制經(jīng)驗(yàn)、技巧和各種直覺推理邏輯進(jìn)行測(cè)辨、概括和總結(jié),并將其編制成簡(jiǎn)單、精度高、能實(shí)時(shí)運(yùn)行的控制算法。仿人智能控制方法具有多模態(tài)多控制器的結(jié)構(gòu),將其應(yīng)用于無刷直流電機(jī)的控制能夠較好地解決當(dāng)前該領(lǐng)域控制器結(jié)構(gòu)復(fù)雜、調(diào)節(jié)困難、響應(yīng)遲鈍和不利于在線實(shí)現(xiàn)等問題。
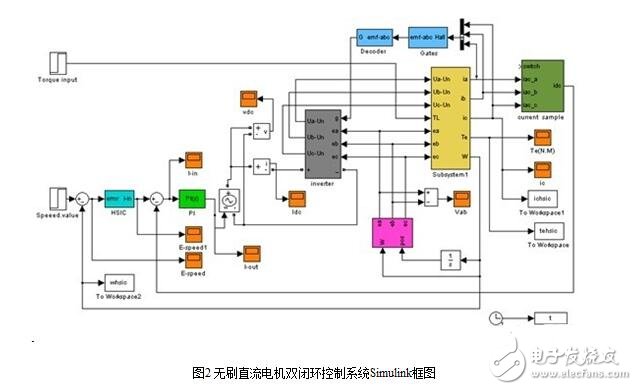
本文所設(shè)計(jì)的無刷直流電機(jī)的反電動(dòng)勢(shì)的為 120°梯形波,電流為方波,工作在兩相導(dǎo)通星形三相六狀態(tài)。設(shè)計(jì)的無刷直流電機(jī)控制系統(tǒng)為雙閉環(huán)控制系統(tǒng),如圖1所示。

該系統(tǒng)可以達(dá)到無刷直流電機(jī)轉(zhuǎn)速輸出值穩(wěn)、快、準(zhǔn)的跟隨轉(zhuǎn)速給定值的控制效果。控制系統(tǒng)設(shè)置轉(zhuǎn)速和電流兩個(gè)控制器,控制器實(shí)行串級(jí)連接。速度控制器采用具有基于速度特征狀態(tài)的多模態(tài)控制結(jié)構(gòu)的仿人智能控制器,增強(qiáng)了系統(tǒng)抗負(fù)載擾動(dòng)能力,保證了系統(tǒng)靜態(tài)和動(dòng)態(tài)跟蹤的性能,同時(shí)也確保了控制系統(tǒng)的魯棒性。
速度控制器是雙閉環(huán)調(diào)速系統(tǒng)的主導(dǎo)控制器,它使轉(zhuǎn)速快速地跟隨給定電壓變化,穩(wěn)態(tài)時(shí)可減小轉(zhuǎn)速誤差。速度控制器性能的優(yōu)劣直接影響到整個(gè)控制系統(tǒng)的控制效果。本文所設(shè)計(jì)的雙閉環(huán)控制系統(tǒng),速度控制器采用具有基于速度特征狀態(tài)的多模態(tài)控制結(jié)構(gòu)的仿人智能控制器,增強(qiáng)了系統(tǒng)抗負(fù)載擾動(dòng)能力,保證了系統(tǒng)靜態(tài)和動(dòng)態(tài)跟蹤的性能,同時(shí)也確保了控制系統(tǒng)的魯棒性。
電流控制器作為內(nèi)環(huán)控制器,在外環(huán)轉(zhuǎn)速控制器的調(diào)節(jié)過程中,它的作用是使電流緊緊跟隨外環(huán)控制器的輸出量變化,同時(shí)保證獲得電機(jī)允許的最大電流,從而加快系統(tǒng)的動(dòng)態(tài)過程。本文所設(shè)計(jì)的雙閉環(huán)系統(tǒng)主要目標(biāo)是對(duì)轉(zhuǎn)速的調(diào)節(jié),在速度控制器精確控制轉(zhuǎn)速的條件下,應(yīng)盡量減小電流控制器的算法復(fù)雜度,以減輕實(shí)時(shí)控制系統(tǒng)中控制器實(shí)現(xiàn)的難度和保證控制的實(shí)時(shí)性。一般來講,調(diào)速系統(tǒng)的要求以動(dòng)態(tài)穩(wěn)定性和穩(wěn)態(tài)精度為主,對(duì)快速性的要求可以差些,主要采用PI控制器;在隨動(dòng)系統(tǒng)中快速性則是主要的性能要求,必須用PD或是PID控制器。基于以上降低算法復(fù)雜度以及控制目標(biāo)特性的兩點(diǎn)考慮,電流控制器采用了傳統(tǒng)的PI控制器。PI電流控制器可以使系統(tǒng)穩(wěn)定,并有足夠的穩(wěn)定裕度可滿足穩(wěn)態(tài)性能指標(biāo),表現(xiàn)出電流無穩(wěn)態(tài)誤差的特性。
控制系統(tǒng)設(shè)置轉(zhuǎn)速和電流兩個(gè)控制器,控制器實(shí)行串級(jí)連接。控制過程為:用設(shè)定的速度值和由轉(zhuǎn)子位置傳感器檢測(cè)的信號(hào)計(jì)算得到的電機(jī)實(shí)際速度值比較,經(jīng)過速度控制器的調(diào)節(jié),輸出電流給定值。檢測(cè)到的電流實(shí)際值與電流給定比較,經(jīng)過電流控制器,輸出得到供給電機(jī)的電壓。采用這種轉(zhuǎn)速、電流雙閉環(huán)控制方式,能夠恰當(dāng)?shù)陌l(fā)揮電流截止負(fù)反饋和轉(zhuǎn)速負(fù)反饋的作用。從靜態(tài)特性上看,單獨(dú)的電流負(fù)反饋有使靜態(tài)特性變軟的趨勢(shì),但是有轉(zhuǎn)速負(fù)反饋在外環(huán),當(dāng)速度控制器不飽和時(shí)(如穩(wěn)態(tài)運(yùn)行時(shí)),靜態(tài)特性上可能由電流負(fù)反饋產(chǎn)生的速度降落,完全被轉(zhuǎn)速控制器的作用消除。
又由于轉(zhuǎn)速控制器采用具有多模態(tài)控制結(jié)構(gòu)的基于特征模型的仿人智能控制,整個(gè)系統(tǒng)將是一個(gè)無穩(wěn)態(tài)誤差的調(diào)速系統(tǒng)。從動(dòng)態(tài)響應(yīng)過程來看,突加設(shè)定轉(zhuǎn)速或啟動(dòng)過程中,轉(zhuǎn)速控制器很快就達(dá)到飽和,只剩下電流環(huán)起作用,系統(tǒng)在最大電流受限的條件下,在大轉(zhuǎn)速偏差下實(shí)現(xiàn)最短時(shí)間控制策略,使轉(zhuǎn)速漸漸穩(wěn)定下來。速度、電流雙閉環(huán)控制系統(tǒng),在突加給定的暫態(tài)過程中表現(xiàn)為一個(gè)恒電流調(diào)節(jié)系統(tǒng),在穩(wěn)態(tài)時(shí)又表現(xiàn)為無穩(wěn)態(tài)誤差的調(diào)速系統(tǒng),控制系統(tǒng)從而具有很好的動(dòng)、靜態(tài)品質(zhì)。
圖2為Matlab的Simulink環(huán)境下建模的整體控制框圖,主要包括:無刷直流電機(jī)本體模塊、仿人智能速度控制器模塊、PI 電流控制器模塊、換相邏輯模塊、電壓逆變器模塊、電流采樣模塊等。仿人智能速度控制器采用 Matlab的S函數(shù)實(shí)現(xiàn),成功實(shí)現(xiàn)了本文所設(shè)計(jì)的仿人智能控制器的多控制器、多模態(tài)的結(jié)構(gòu)。
為了驗(yàn)證系統(tǒng)的性能,我們進(jìn)行了以下兩個(gè)仿真實(shí)驗(yàn):
1. 調(diào)節(jié)轉(zhuǎn)速實(shí)驗(yàn)
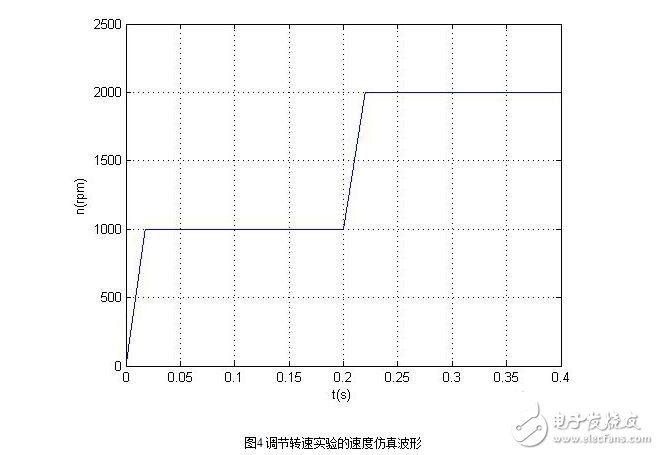
首先系統(tǒng)空載起動(dòng),設(shè)定轉(zhuǎn)速到1000rpm,等達(dá)到穩(wěn)定狀態(tài)后,在0.2s 時(shí)調(diào)節(jié)轉(zhuǎn)速到2000rpm。仿真實(shí)驗(yàn)所得到的轉(zhuǎn)矩波形和轉(zhuǎn)速響應(yīng)的仿真曲線如圖3-4所示。

2. 變換負(fù)載實(shí)驗(yàn)
系統(tǒng)空載起動(dòng),設(shè)定轉(zhuǎn)速到 1000rpm,待進(jìn)入穩(wěn)態(tài)狀態(tài)后,在 0.1s 時(shí)加入負(fù)載 TL=0.03Nm。實(shí)驗(yàn)得到的轉(zhuǎn)矩波形和轉(zhuǎn)速響應(yīng)曲線的仿真曲線如圖 5-6 所示。
在空載運(yùn)行時(shí),相電流達(dá)到最大值,達(dá)到最大啟動(dòng)轉(zhuǎn)矩,在較短時(shí)間內(nèi)進(jìn)入穩(wěn)態(tài),反電動(dòng)勢(shì)波形其平頂部分約為 120度較為理想,系統(tǒng)上升時(shí)間tr較短,超調(diào)量 小系統(tǒng)穩(wěn)定性好,調(diào)節(jié)時(shí)間 ts也很短。穩(wěn)態(tài)運(yùn)行時(shí)轉(zhuǎn)速無穩(wěn)態(tài)誤差,與理論分析相吻合。在 0.1s 時(shí)加入負(fù)載TL =0.03Nm,這時(shí)相電流增大以提高電磁轉(zhuǎn)矩,拖動(dòng)外界負(fù)載,同時(shí)反電動(dòng)勢(shì)幅值由于電流增大而略微增大。


結(jié)論與小結(jié)
1. 設(shè)計(jì)了無刷直流電機(jī)的仿人智能控制算法,并基于MATLAB平臺(tái)建立了無刷直流電機(jī)的仿真控制系統(tǒng)。
2. 通過對(duì)轉(zhuǎn)速調(diào)節(jié)仿真實(shí)驗(yàn),可以看到所設(shè)計(jì)的無刷直流電機(jī)仿人智能雙閉環(huán)控制系統(tǒng)具有良好的動(dòng)、靜態(tài)特性。通過對(duì)變換負(fù)載仿真實(shí)驗(yàn)中的相電流、相反電動(dòng)勢(shì)、轉(zhuǎn)矩波形和轉(zhuǎn)速響應(yīng)的曲線的研究,可知,所設(shè)計(jì)的無刷直流電機(jī)仿人智能雙閉環(huán)控制系統(tǒng)能夠充分抑制外部的擾動(dòng)。
3. 仿真結(jié)果表明了本文所設(shè)計(jì)的無刷直流電機(jī)仿人智能控制系統(tǒng)響應(yīng)速度快、抗干擾能力強(qiáng),具有較強(qiáng)的實(shí)用價(jià)值。
?
推薦課程:
張飛軟硬開源,基于STM32?BLDC直流無刷電機(jī)驅(qū)動(dòng)器視頻套件
http://t.elecfans.com/topic/42.html?elecfans_trackid=fsy_post










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論