 電子發(fā)燒友App
電子發(fā)燒友App


無刷直流電機由電動機主體和驅(qū)動器組成,是一種典型的機電一體化產(chǎn)品。 無刷電機是指無電刷和換向器(或集電環(huán))的電機,又稱無換向器電機。早在十九紀(jì)誕生電機的時候,產(chǎn)生的實用性電機就是無刷形式,即交流鼠籠式異步電動機,這種電動機得到了廣泛的應(yīng)用。但是,異步電動機有許多無法克服的缺陷,以致電機技術(shù)發(fā)展緩慢。上世紀(jì)中葉誕生了晶體管,因而采用晶體管換向電路代替電刷與換向器的直流無刷電機就應(yīng)運而生了。這種新型無刷電機稱為電子換向式直流電機,它克服了第一代無刷電機的缺陷。
本文要介紹電機種類中發(fā)展快速且應(yīng)用廣泛的無刷直流電機(以下簡稱BLDC)。BLDC被廣泛的用于日常生活用具、汽車工業(yè)、航空、消費電子、醫(yī)學(xué)電子、工業(yè)自動化等裝置和儀表。 顧名思義,BLDC不使用機械結(jié)構(gòu)的換向電刷而直接使用電子換向器,在使用中BLDC相比有刷電機有許多的優(yōu)點。
BLDC(無刷直流電機)的結(jié)構(gòu)
直流無刷電機是同步電機的一種,也就是說電機轉(zhuǎn)子的轉(zhuǎn)速受電機定子旋轉(zhuǎn)磁場的速度及轉(zhuǎn)子極數(shù)(p)影響:
n=60.f / p。在轉(zhuǎn)子極數(shù)固定情況下,改變定子旋轉(zhuǎn)磁場的頻率就可以改變轉(zhuǎn)子的轉(zhuǎn)速。直流無刷電機即是將同步電機加上電子式控制(驅(qū)動器),控制定子旋轉(zhuǎn)磁場的頻率并將電機轉(zhuǎn)子的轉(zhuǎn)速回授至控制中心反復(fù)校正,以期達到接近直流電機特性的方式。也就是說直流無刷電機能夠在額定負(fù)載范圍內(nèi)當(dāng)負(fù)載變化時仍可以控制電機轉(zhuǎn)子維持一定的轉(zhuǎn)速。
直流無刷驅(qū)動器包括電源部及控制部:電源部提供三相電源給電機,控制部則依需求轉(zhuǎn)換輸入電源頻率。
電源部可以直接以直流電輸入(一般為24v)或以交流電輸入(110v/220 v),如果輸入是交流電就得先經(jīng)轉(zhuǎn)換器轉(zhuǎn)成直流。不論是直流電輸入或交流電輸入要轉(zhuǎn)入電機線圈前須先將直流電壓由換流器轉(zhuǎn)成3相電壓來驅(qū)動電機。換流器一般由6個功率晶體管(q1~q6)分為上臂(q1、q3、q5)/下臂(q2、q4、q6)連接電機作為控制流經(jīng)電機線圈的開關(guān)。控制部則提供pwm(脈沖寬度調(diào)制)決定功率晶體管開關(guān)頻度及換流器換相的時機。直流無刷電機一般希望使用在當(dāng)負(fù)載變動時速度可以穩(wěn)定于設(shè)定值而不會變動太大的速度控制,所以電機內(nèi)部裝有能感應(yīng)磁場的霍爾傳感器,做為速度之閉回路控制,同時也做為相序控制的依據(jù)。但這只是用來做為速度控制并不能拿來做為定位控制。
1、定子
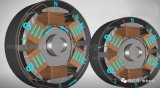
BLDC定子是由許多硅鋼片經(jīng)過疊壓和軸向沖壓而成,每個沖槽內(nèi)都有一定的線圈組成了繞組,可以參見下圖。從傳統(tǒng)意義上講,BLDC的定子和感應(yīng)電機的定子有點類似,不過在定子繞組的分布上有一定的差別。大多數(shù)的BLDC定子有3個呈星行排列的繞組,每個繞組又由許多內(nèi)部結(jié)合的鋼片按照一定的方式組成,偶數(shù)個繞組分布在定子的周圍組成了偶數(shù)個磁極。
圖2.1.1. BLDC內(nèi)部結(jié)構(gòu)
BLDC的定子繞組可以分為梯形和正弦兩種繞組,它們的根本區(qū)別在于由于繞組的不同連接方式使它們產(chǎn)生的反電動勢(反電動勢的相關(guān)介紹請參加EMF一節(jié))不同,分別呈現(xiàn)梯形和正弦波形,故用此命名了。梯形和正弦繞組產(chǎn)生的反電動勢的波形圖如下圖。
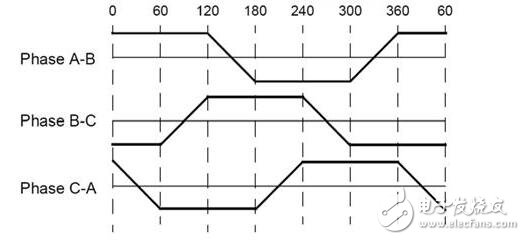
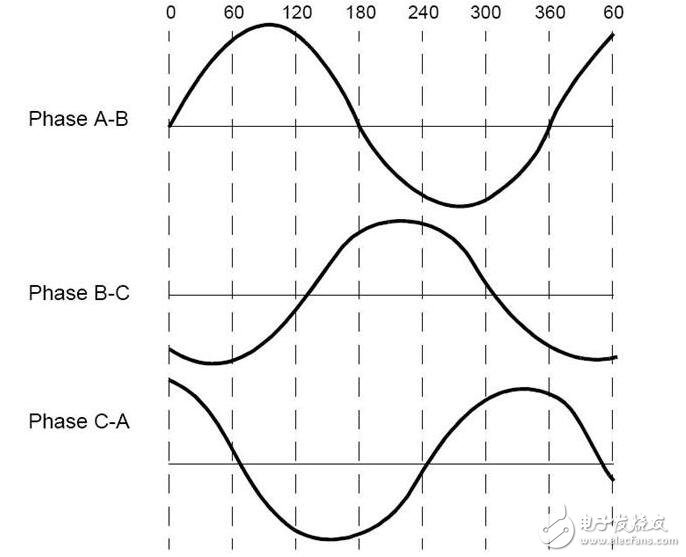
另外還需要對反電動勢的一點說明就是繞組的不同其相電流也是呈現(xiàn)梯形和正弦波形,可想而知正弦繞組由于波形平滑所以運行起來相對梯形繞組來說就更平穩(wěn)一些。但是,正弦型繞組由于有更多繞組使得其在銅線的使用上就相對梯形繞組要多。
平時由于應(yīng)用電壓的不同,我們可以根據(jù)需要選擇不同電壓范圍的無刷電機。48V及其以下應(yīng)用電壓的電機可以用在汽車、機器人、小型機械臂等方面。100V及其以上電壓范圍的電機可以用在專用器具、自動控制以及工業(yè)生產(chǎn)領(lǐng)域。
2、轉(zhuǎn)子
定子是2至8對永磁體按照N極和S極交替排列在轉(zhuǎn)子周圍構(gòu)成的(內(nèi)轉(zhuǎn)子型),如果是外轉(zhuǎn)子型BLDC那么就是貼在轉(zhuǎn)子內(nèi)壁咯。如圖2.2.1所示;
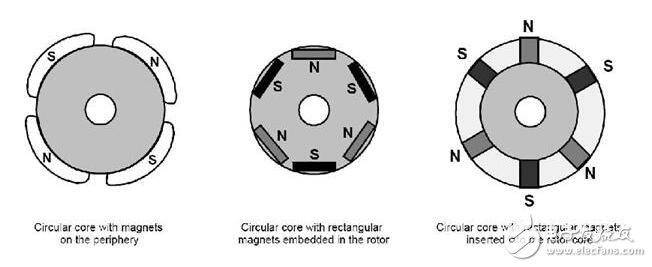
圖2.2.1 轉(zhuǎn)子磁極排布
3、霍爾傳感器
與有刷直流電機不同,無刷直流電機使用電子方式換向。要使BLDC轉(zhuǎn)起來,必須要按照一定的順序給定子通電,那么我們就需要知道轉(zhuǎn)子的位置以便按照通電次序給相應(yīng)的定子線圈通電。定子的位置是由嵌入到定子的霍爾傳感器感知的。通常會安排3個霍爾傳感器在轉(zhuǎn)子的旋轉(zhuǎn)路徑周圍。無論何時,只要轉(zhuǎn)子的磁極掠過霍爾元件時,根據(jù)轉(zhuǎn)子當(dāng)前磁極的極性霍爾元件會輸出對應(yīng)的高或低電平,這樣只要根據(jù)3個霍爾元件產(chǎn)生的電平的時序就可以判斷當(dāng)前轉(zhuǎn)子的位置,并相應(yīng)的對定子繞組進行通電。
霍爾效應(yīng):當(dāng)通電導(dǎo)體處于磁場中,由于磁場的作用力使得導(dǎo)體內(nèi)的電荷會向?qū)w的一側(cè)聚集,當(dāng)薄平板通電導(dǎo)體處于磁場中時這種效應(yīng)更為明顯,這樣一側(cè)聚集了電荷的導(dǎo)體會抵消磁場的這種影響,由于電荷在導(dǎo)體一側(cè)的聚集,從而使得導(dǎo)體兩側(cè)產(chǎn)生電壓,這種現(xiàn)象就稱為霍爾效應(yīng),E.H霍爾在1879年發(fā)現(xiàn)了這一現(xiàn)象,故以此命名。

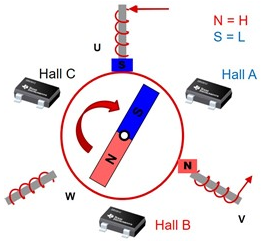
圖2.3.1 霍爾傳感器測量原理
圖 2.3.1顯示了NS磁極交替排列的轉(zhuǎn)子的橫截面。霍爾元件安放在電機的固定位置,將霍爾元件安放到電機的定子是比較復(fù)雜的,因為如果安放時位置沒有和轉(zhuǎn)子的磁場相切那么就可能導(dǎo)致霍爾元件的測量值不能準(zhǔn)確的反應(yīng)轉(zhuǎn)子當(dāng)前的位置,鑒于以上原因,為了簡化霍爾元件的安裝,通常在電機的轉(zhuǎn)子上安裝一顆冗余的磁體,這個磁體專門用來感應(yīng)霍爾元件,這樣就能起到和轉(zhuǎn)子磁體感應(yīng)的相同效果,霍爾元件一般按照圓周安放在印刷電路板上并配備了調(diào)節(jié)蓋,這樣用戶就可以根據(jù)磁場的方向非常方便的調(diào)節(jié)霍爾元件的位置以便使它工作在最佳狀態(tài)。
霍爾元件位置的安排上,有60夾角和120夾角兩種。基于這種擺放形式,BLDC的電流換向順序由制造廠商制定,當(dāng)我們控制電機的時候就需要用到這種換向順序。
注意:霍爾元件的電壓范圍從4V到24V不等,電流范圍從5mA到15mA不等,所以在考慮控制器時要考慮到霍爾元件的電流和電壓要求。另外,霍爾元件輸出集電極開路,使用時需要接上拉電阻。
無刷直流電機的工作原理
無刷直流電機由電動機主體和驅(qū)動器組成,是一種典型的機電一體化產(chǎn)品。 電動機的定子繞組多做成三相對稱星形接法,同三相異步電動機十分相似。電動機的轉(zhuǎn)子上粘有已充磁的永磁體 ,為了檢測電動機轉(zhuǎn)子的極性,在電動機內(nèi)裝有位置傳感器。驅(qū)動器由功率電子器件和集成電路等構(gòu)成,其功能是:接受電動機的啟動、停止、制動信號,以控制電動機的啟動、停止和制動;接受位置傳感器信號和正反轉(zhuǎn)信號,用來控制逆變橋各功率管的通斷,產(chǎn)生連續(xù)轉(zhuǎn)矩;接受速度指令和速度反饋信號,用來控制和調(diào)整轉(zhuǎn)速;提供保護和顯示等等。
直流電機具有響應(yīng)快速、較大的起動轉(zhuǎn)矩、從零轉(zhuǎn)速至額定轉(zhuǎn)速具備可提供額定轉(zhuǎn)矩的性能,但直流電機的優(yōu)點也正是它的缺點,因為直流電機要產(chǎn)生額定負(fù)載下恒定轉(zhuǎn)矩的性能,則電樞磁場與轉(zhuǎn)子磁場須恒維持90°,這就要藉由碳刷及整流子。碳刷及整流子在電機轉(zhuǎn)動時會產(chǎn)生火花、碳粉因此除了會造成組件損壞之外,使用場合也受到限制。交流電機沒有碳刷及整流子,免維護、堅固、應(yīng)用廣,但特性上若要達到相當(dāng)于直流電機的性能須用復(fù)雜控制技術(shù)才能達到。現(xiàn)今半導(dǎo)體發(fā)展迅速功率組件切換頻率加快許多,提升驅(qū)動電機的性能。微處理機速度亦越來越快,可實現(xiàn)將交流電機控制置于一旋轉(zhuǎn)的兩軸直角坐標(biāo)系統(tǒng)中,適當(dāng)控制交流電機在兩軸電流分量,達到類似直流電機控制并有與直流電機相當(dāng)?shù)男阅堋?/p>
此外已有很多微處理機將控制電機必需的功能做在芯片中,而且體積越來越小;像模擬/數(shù)字轉(zhuǎn)換器(analog-to-digital converter,adc)、脈沖寬度調(diào)制(pulse wide modulator,pwm)…等。直流無刷電機即是以電子方式控制交流電機換相,得到類似直流電機特性又沒有直流電機機構(gòu)上缺失的一種應(yīng)用。
1、操作原理
每一次換向都會有一組繞組處于正向通電;第二組反相通電;第三組不通電。轉(zhuǎn)子永磁體的磁場和定子鋼片產(chǎn)生的磁場相互作用就產(chǎn)生了轉(zhuǎn)矩,理論上,當(dāng)這兩個磁場夾角為90?時會產(chǎn)生最大的轉(zhuǎn)矩,當(dāng)這兩個磁場重合時轉(zhuǎn)矩變?yōu)?,為了使轉(zhuǎn)子不停的轉(zhuǎn)動,那么就需要按順序改變定子的磁場,就像轉(zhuǎn)子的磁場一直在追趕定子的磁場一樣。典型的“六步電流換向”順序圖展示了定子內(nèi)繞組的通電次序。
2、轉(zhuǎn)矩/轉(zhuǎn)速特性
圖 2.5.1 轉(zhuǎn)矩和速度特性顯示了轉(zhuǎn)矩和轉(zhuǎn)速特性。BLDC一共有兩種轉(zhuǎn)矩度量:最大轉(zhuǎn)矩和額定轉(zhuǎn)矩。當(dāng)電機連續(xù)運轉(zhuǎn)的時候表現(xiàn)出來的就是額定轉(zhuǎn)矩。在無刷電機達到額定轉(zhuǎn)速之前,轉(zhuǎn)矩不變,無刷電機最高轉(zhuǎn)速可以達到額定轉(zhuǎn)速的150%,但是超速時電機的轉(zhuǎn)矩會相應(yīng)下降。
在實際的應(yīng)用中,我們常常會讓帶負(fù)載的電機啟動、停轉(zhuǎn)和逆向運行,此時就需要比額定轉(zhuǎn)矩更大的轉(zhuǎn)矩。特別是當(dāng)轉(zhuǎn)子靜止和反方向加速時啟動電機,這個時候就需要更大的轉(zhuǎn)矩來抵消負(fù)載和轉(zhuǎn)子自身的慣性,這個時候就需要提供最大的轉(zhuǎn)矩一直到電機進入正向轉(zhuǎn)矩曲線階段。
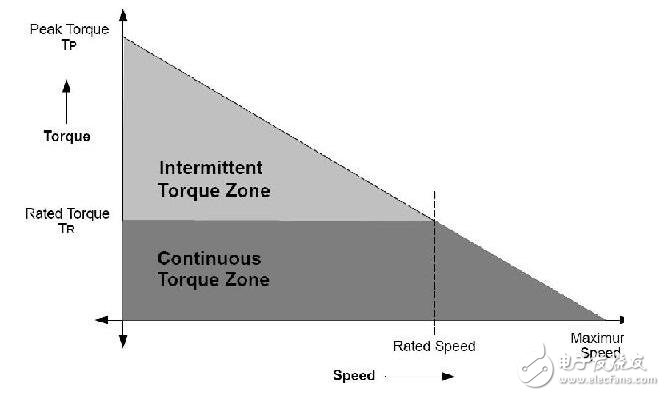
圖2.5.1 轉(zhuǎn)矩和速度特性
推薦課程:
張飛軟硬開源,基于STM32?BLDC直流無刷電機驅(qū)動器視頻套件
http://t.elecfans.com/topic/42.html?elecfans_trackid=fsy_post









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論