 電子發燒友App
電子發燒友App


Arduino與MPU-6050的通信
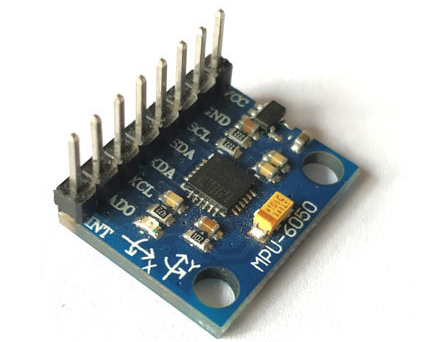
為避免糾纏于電路細節,我們直接使用集成的MPU6050模塊。MPU6050的數據接口用的是I2C總線協議,因此我們需要Wire程序庫的幫助來實現Arduino與MPU6050之間的通信。請先確認你的Arduino編程環境中已安裝Wire庫。
Wire庫的官方文檔(http://www.arduino.cc/en/Reference/Wire)中指出:在UNO板子上,SDA接口對應的是A4引腳,SCL對應的是A5引腳。MPU6050需要5V的電源,可由UNO板直接供電。按照下圖連線。
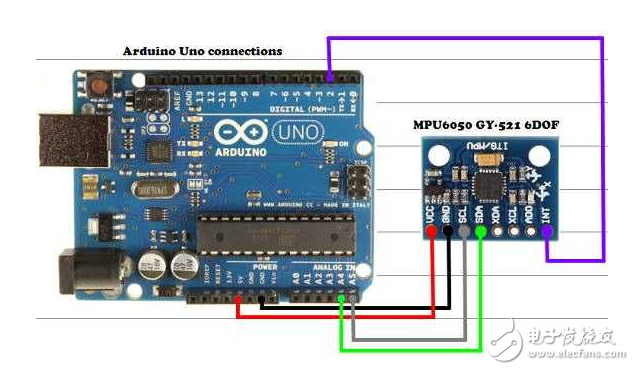
(紫色線是中斷線,這里用不到,可以不接)
MPU6050的數據寫入和讀出均通過其芯片內部的寄存器實現,這些寄存器的地址都是1個字節,也就是8位的尋址空間,其寄存器的詳細列表說明書請點擊下載:https://www.olimex.com/Products/Modules/Sensors/MOD-MPU6050/resources/RM-MPU-60xxA_rev_4.pdf
1.1 將數據寫入MPU-6050
在每次向器件寫入數據前要先打開Wire的傳輸模式,并指定器件的總線地址,MPU6050的總線地址是0x68(AD0引腳為高電平時地址為0x69)。然后寫入一個字節的寄存器起始地址,再寫入任意長度的數據。這些數據將被連續地寫入到指定的起始地址中,超過當前寄存器長度的將寫入到后面地址的寄存器中。寫入完成后關閉Wire的傳輸模式。下面的示例代碼是向MPU6050的0x6B寄存器寫入一個字節0。
Wire.beginTransmission(0x68); //開啟MPU6050的傳輸
Wire.write(0x6B); //指定寄存器地址
Wire.write(0); //寫入一個字節的數據
Wire.endTransmission(true); //結束傳輸,true表示釋放總線
1.2 從MPU-6050讀出數據
讀出和寫入一樣,要先打開Wire的傳輸模式,然后寫一個字節的寄存器起始地址。接下來將指定地址的數據讀到Wire庫的緩存中,并關閉傳輸模式。最后從緩存中讀取數據。下面的示例代碼是從MPU6050的0x3B寄存器開始讀取2個字節的數據:
Wire.beginTransmission(0x68); //開啟MPU6050的傳輸
Wire.write(0x3B); //指定寄存器地址
Wire.requestFrom(0x68, 2, true); //將輸據讀出到緩存
Wire.endTransmission(true); //關閉傳輸模式
int val = Wire.read() 《《 8 | Wire.read(); //兩個字節組成一個16位整數
1.3 具體實現
通常應當在setup函數中對Wire庫進行初始化:
Wire.begin();
在對MPU6050進行各項操作前,必須啟動該器件,向它的0x6B寫入一個字節0即可啟動。通常也是在setup函數完成,代碼見1.1節。
MPU6050芯片提供的數據夾雜有較嚴重的噪音,在芯片處理靜止狀態時數據擺動都可能超過2%。除了噪音,各項數據還會有偏移的現象,也就是說數據并不是圍繞靜止工作點擺動,因此要先對數據偏移進行校準 ,再通過濾波算法消除噪音。
對于夾雜了大量噪音的數據,卡爾曼濾波器的效果無疑是最好的。如果不想考慮算法細節,可以直接使用Arduino的Klaman Filter庫完成。在我們的模型中,一個卡爾曼濾波器接受一個軸上的角度值、角速度值以及時間增量,估計出一個消除噪音的角度值。跟據當前的角度值和上一輪估計的角度值,以及這兩輪估計的間隔時間,我們還可以反推出消除噪音的角速度。
arduino讀取MPU6050數據源代碼參考:
#include “Wire.h” //包含頭文件
#define SMPLRT_DIV 0x19 //陀螺儀采樣率,典型值:0x07(125Hz)
#define CONFIG 0x1A //低通濾波頻率,典型值:0x06(5Hz)
#define GYRO_CONFIG 0x1B //陀螺儀自檢及測量范圍,典型值:0x18(不自檢,2000deg/s)
#define ACCEL_CONFIG 0x1C //加速計自檢、測量范圍及高通濾波頻率,典型值:0x01(不自檢,2G,5Hz)
#define ACCEL_XOUT_H 0x3B //定義加速度x軸的高八位[15:8]
#define ACCEL_XOUT_L 0x3C //定義加速度x軸的低八位[7:0]
#define ACCEL_YOUT_H 0x3D //定義加速度y軸的高八位[15:8]
#define ACCEL_YOUT_L 0x3E //定義加速度y軸的低八位[7:0]
#define ACCEL_ZOUT_H 0x3F //定義加速度z軸的高八位[15:8]
#define ACCEL_ZOUT_L 0x40 //定義加速度z軸的低八位[7:0]
#define TEMP_OUT_H 0x41
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43 //定義加速度x軸的高八位[15:8]
#define GYRO_XOUT_L 0x44 //定義加速度x軸的低八位[7:0]
#define GYRO_YOUT_H 0x45 //定義加速度y軸的高八位[15:8]
#define GYRO_YOUT_L 0x46 //定義加速度y軸的低八位[7:0]
#define GYRO_ZOUT_H 0x47 //定義加速度z軸的高八位[15:8]
#define GYRO_ZOUT_L 0x48 //定義加速度z軸的低八位[7:0]
#define PWR_MGMT_1 0x6B //電源管理,典型值:0x00(正常啟用)
#define WHO_AM_I 0x75 //IIC地址寄存器(默認數值0x68,只讀)
#define SlaveAddress 0xD0 //IIC寫入時的地址字節數據,+1為讀取
int ax0,ax1,axout; //定義加速度傳感器從寄存器地址獲取的高八位低八位數據以及輸出的模擬量
int ay0,ay1,ayout;
int az0,az1,azout;
int gx0,gx1,gxout; //定義陀螺儀傳感器從寄存器地址獲取的高八位低八位數據以及輸出的模擬量
int gy0,gy1,gyout;
int gz0,gz1,gzout;
double Xa,Ya,Za;
double Xg,Yg,Zg;
//float aax,aay;
//float pi=3.1415926;
int MPU6050address = 0x68;//MPU6050的地址
void setup()
{
Wire.begin(); //設置I2通信時的本機地址
Serial.begin(9600);
Wire.beginTransmission(MPU6050address);//啟動I2通信,讀取MPU6050地址
// Wire.write(GYRO_CONFIG);//從傳感器寫入數據
// Wire.write(ACCEL_CONFIG);
Wire.write(8); //寫入8位字節
Wire.endTransmission();//結束通信
}
void loop()
{
Wire.beginTransmission(MPU6050address);
Wire.write(ACCEL_XOUT_H);//寫加速度計x軸數據
Wire.write(ACCEL_XOUT_L);
Wire.write(GYRO_XOUT_H);//寫陀螺儀計x軸數據
Wire.write(GYRO_XOUT_L);
Wire.endTransmission();
Wire.requestFrom(MPU6050address,2);
if(Wire.available()《=2);//用于返回接受的字節數
{
ax0 = Wire.read();
ax1 = Wire.read();
ax1 = ax1《《8;
axout = ax0+ax1;
gx0 = Wire.read();
gx1 = Wire.read();
gx1 = gx1《《8;
gxout = gx0+gx1;
}
Wire.beginTransmission(MPU6050address);
Wire.write(ACCEL_YOUT_H);
Wire.write(ACCEL_YOUT_L);
Wire.write(GYRO_YOUT_
H);
Wire.write(GYRO_YOUT_L);
Wire.endTransmission();
Wire.requestFrom(MPU6050address,2);
if(Wire.available()《=2);
{
ay0 = Wire.read();
ay1 = Wire.read();
ay1 = ay1《《8;
ayout = ay0+ay1;
gy0 = Wire.read();
gy1 = Wire.read();
gy1 = gy1《《8;
gyout = gy0+gy1;
}
Wire.beginTransmission(MPU6050address);
Wire.write(ACCEL_ZOUT_H);
Wire.write(ACCEL_ZOUT_L);
Wire.write(GYRO_ZOUT_H);
Wire.write(GYRO_ZOUT_L);
Wire.endTransmission();
Wire.requestFrom(MPU6050address,2);
if(Wire.available()《=2);
{
az0 = Wire.read();
az1 = Wire.read();
az1 = ax1《《8;
azout = az0+az1;
gz0 = Wire.read();
gz1 = Wire.read();
gz1 = gz1《《8;
gzout = gz0+gz1;
}
Xa=axout/256.00; //把輸出結果轉換為重力加速度g,精確到小數點后2位
Ya=ayout/256.00;
Za=azout/256.00;
Xg=gxout/256.00;
Yg=gyout/256.00;
Zg=gzout/256.00;
// aax = atan(Xa/Za) * (-180) / pi; //想轉化為角度的,可是感覺到有點不對,就沒寫進去
// aay = atan(Ya/Xa) * (-180) / pi;
Serial.println(“Xa:”);//輸出6050不同軸采集到的數據
Serial.print(Xa,DEC);
Serial.println(‘\n’);
Serial.println(“Ya:”);
Serial.print(Ya,DEC);
Serial.println(‘\n’);
Serial.println(“Za:”);
Serial.print(Za,DEC);
Serial.println(‘\n’);
delay(500);
Serial.println(“Xg:”);
Serial.print(Xg,DEC);
Serial.println(‘\n’);
Serial.println(“Yg:”);
Serial.print(Yg,DEC);
Serial.println(‘\n’);
Serial.println(“Zg:”);
Serial.print(Zg,DEC);
Serial.println(‘\n’);
delay(500);
}











 工商網監
工商網監
評論