 電子發燒友App
電子發燒友App


模擬信號只有通過A/D轉化為數字信號后才能用軟件進行處理,這一切都是通過A/D轉換器(ADC)來實現的。與模數轉換相對應的是數模轉換,數模轉換是模數轉換的逆過程,在一般的工業應用系統中傳感器把非電量的模擬信號變成與之對應的模擬信號,然后經模擬(Analog)到數字(Digital)轉換電路將模擬信號轉成對應的數字信號送微機處理。這就是一個完整的信號鏈,模擬到數字的轉換過程就是我們經常接觸到的ADC電路。
模數轉換原理:
ADC的轉換原理根據ADC的電路形式有所不同。 ADC電路通常由兩部分組成,它們是:采樣、保持電路和量化、編碼電路。其中量化、編碼電路是最核心的部件,任何ADC轉換電路都必須包含這種電路。 ADC電路的形式很多,通常可以并為兩類:
間接法:它是將采樣-保持的模擬信號先轉換成與模擬量成正比的時間或頻率,然后再把它轉換為數字量。這種通常是采用時鐘脈沖計數器,它又被稱為計數器式。它的工作特點是:工作速度低,轉換精度高,抗干擾能力強。
直接法:通過基準電壓與采樣-保持信號進行比較,從而轉換為數字量。它的工作特點是:工作速度高,轉換精度容易保證。
模數轉換的過程:
有四個階段,即采樣、保持、量化和編碼。
采樣是將連續時間信號變成離散時間信號的過程。經過采樣,時間連續、數值連續的模擬信號就變成了時間離散、數值連續的信號,稱為采樣信號。采樣電路相當于一個模擬開關,模擬開關周期性地工作。理論上,每個周期內,模擬開關的閉合時間趨近于0。在模擬開關閉合的時刻(采樣時刻),我們就“采”到模擬信號的一個“樣本”。
量化是將連續數值信號變成離散數值信號的過程。理論上,經過量化,我們就可以將時間離散、數值連續的采樣信號變成時間離散、數值離散的數字信號。
我們知道,在電路中,數字量通常用二進制代碼表示。因此,量化電路的后面有一個編碼電路,將數字信號的數值轉換成二進制代碼。
然而,量化和編碼總是需要一定時間才能完成,所以,量化電路的前面還要有一個保持電路。保持是將時間離散、數值連續的信號變成時間連續、數值離散信號的過程。在量化和編碼期間,保持電路相當于一個恒壓源,它將采樣時刻的信號電壓“保持”在量化器的輸入端。雖然邏輯上保持器是一個獨立的單元,但是,工程上保持器總是與采樣器做在一起。兩者合稱采樣保持器。
八位串行A/D轉換器ADC0832簡介:
ADC0832 是美國國家半導體公司生產的一種8 位分辨率、雙通道A/D轉換芯片。由于它體積小,兼容性強,性價比高而深受單片機愛好者及企業歡迎,其目前已經有很高的普及率。ADC083X是市面上常見的串行模—數轉換器件系列。ADC0831、ADC0832、ADC0834、ADC0838是具有多路轉換開關的8位串行I/O模—數轉換器,轉換速度較高(轉換時間32uS),單電源供電,功耗低(15mW),適用于各種便攜式智能儀表。本章以ADC0832為例,介紹其使用方法。
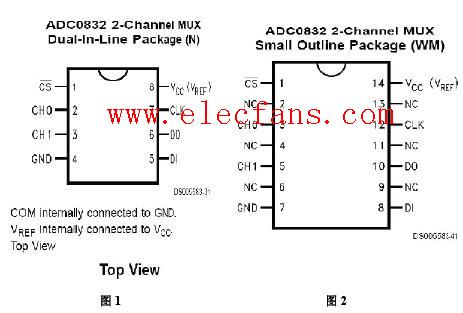
ADC0832是8腳雙列直插式雙通道A/D轉換器,能分別對兩路模擬信號實現模—數轉換,可以用在單端輸入方式和差分方式下工作。ADC0832采用串行通信方式,通過DI 數據輸入端進行通道選擇、數據采集及數據傳送。8位的分辨率(較高分辨可達256級),可以適應一般的模擬量轉換要求。其內部電源輸入與參考電壓的復用,使得芯片的模擬電壓輸入在0~5V之間。具有雙數據輸出可作為數據校驗,以減少數據誤差,轉換速度快且穩定性能強。獨立的芯片使能輸入,使多器件掛接和處理器控制變的更加方便。
ADC0832特點:
· 8位分辨率;
· 雙通道A/D轉換;
· 輸入輸出電平與TTL/CMOS相兼容;
· 5V電源供電時輸入電壓在0~5V之間;
· 工作頻率為250KHZ,轉換時間為32μS;
· 一般功耗僅為15mW;
· 8P、14P—DIP(雙列直插)、PICC 多種封裝;
· 商用級芯片溫寬為0°C to +70°C,工業級芯片溫寬為-40°C to +85°C;
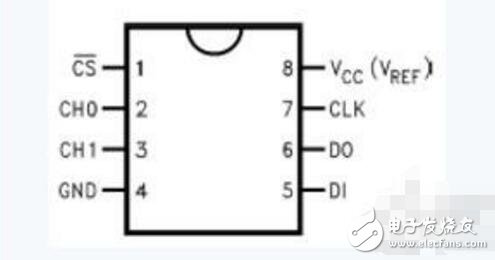
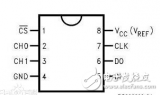
ADC0832引腳圖
芯片接口說明:
· CS_ 片選使能,低電平芯片使能。
· CH0 模擬輸入通道0,或作為IN+/-使用。
· CH1 模擬輸入通道1,或作為IN+/-使用。
· GND 芯片參考零電位(地)。
· DI 數據信號輸入,選擇通道控制。
· DO 數據信號輸出,轉換數據輸出。
· CLK 芯片時鐘輸入。
· Vcc/REF 電源輸入及參考電壓輸入(復用)
ADC0832的工作原理:
正常情況下ADC0832 與單片機的接口應為4條數據線,分別是CS、CLK、DO、DI。但由于DO端與DI端在通信時并未同時使用并與單片機的接口是雙向的,所以在I/O口資源緊張時可以將DO和DI并聯在一根數據線上使用。當ADC0832未工作時其CS輸入端應為高電平,此時芯片禁用,CLK 和DO/DI 的電平可任意。當要進行A/D轉換時,須先將CS使能端置于低電平并且保持低電平直到轉換完全結束。此時芯片開始轉換工作,同時由處理器向芯片時鐘(CLK)輸入端輸入時鐘脈沖,DO/DI端則使用DI端輸入通道功能選擇的數據信號。在一個時鐘脈沖的下沉之前DI端必須是高電平,表示啟始信號。在第二、三個脈沖下沉之前DI端應輸入兩位數據用于選擇通道功能。
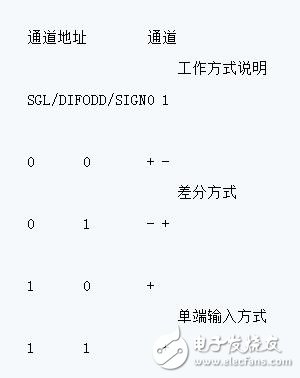
表1:通道地址設置表
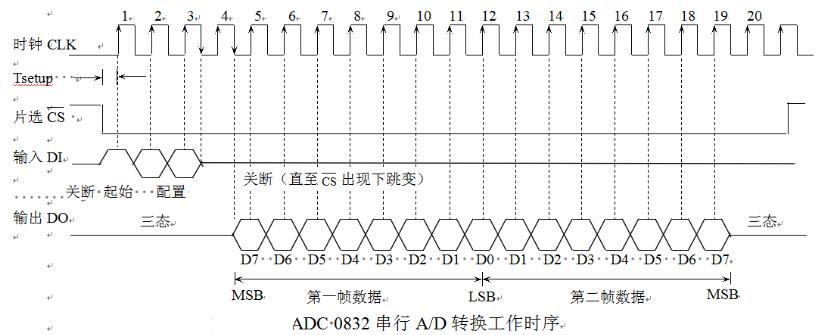
如表1所示,當此兩位數據為“1”、“0”時,只對CH0 進行單通道轉換。當2位數據為“1”、“1”時,只對CH1進行單通道轉換。當兩位數據為“0”、“0”時,將CH0作為正輸入端IN+,CH1作為負輸入端IN-進行輸入。當兩位數據為“0”、“1”時,將CH0作為負輸入端IN-,CH1 作為正輸入端IN+進行輸入。到第三個脈沖的下降之后DI端的輸入電平就失去輸入作用,此后DO/DI端則開始利用數據輸出DO進行轉換數據的讀取。從第4個脈沖下降沿開始由DO端輸出轉換數據最高位Data7,隨后每一個脈沖的下降沿DO端輸出下一位數據。直到第11個脈沖時發出最低位數據Data0,一個字節的數據輸出完成。也正是從此位開始輸出下一個相反字節的數據,即從第11個字節的下降沿輸出Data0。隨后輸出8位數據,到第19 個脈沖時數據輸出完成,也標志著一次A/D轉換的結束。最后將CS置高電平禁用芯片,直接將轉換后的數據進行處理就可以了。時序說明請參照圖4。
作為單通道模擬信號輸入時ADC0832的輸入電壓是0—5V且8位分辨率時的電壓精度為19.53mV,即(5/256)V。如果作為由IN+與IN-輸入的輸入時,可是將電壓值設定在某一個較大范圍之內,從而提高轉換的寬度。但值得注意的是,在進行IN+與IN-的輸入時,如果IN-的電壓大于IN+的電壓則轉換后的數據結果始終為00H。
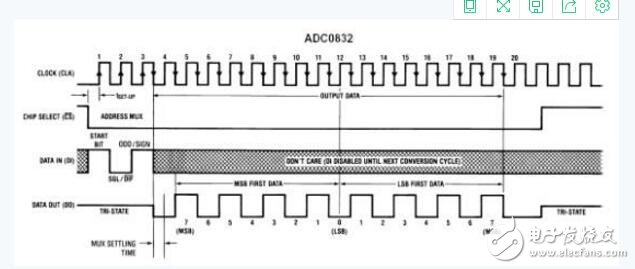
ADC0832的工作時序
ADC0832軟硬件設計實例
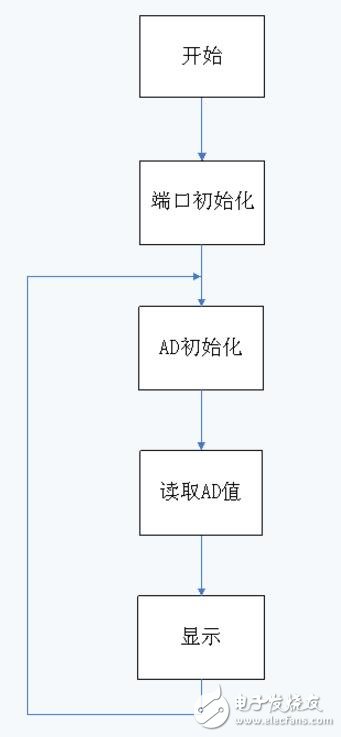
通過以上的理論學習之后,對模—數轉換應該有了一定的了解,接下來就根據上文的指導,對ADC0832進行實際應用,以加深印象。本實例功能是將通道1上采樣到的電壓顯示在LED數碼管上,通過改變通道1的輸入電壓變化,觀察輸出讀數。
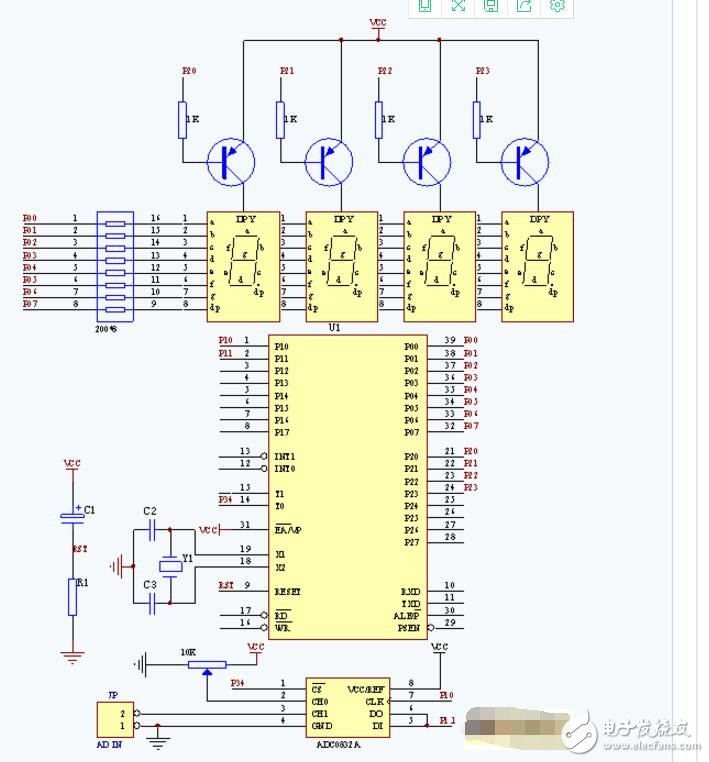
硬件原理圖
軟件流程圖
STC單片機的相關程序:
#include //定義的 系統頭文件和全局變量
#include
#define uchar unsigned char
#define uint unsigned int
#define DogReset() WDT_CONTR=0x35
// T1 定時 0.1ms.作為系統計時用,
#define vT01ms 2
#define vT10ms 10
#define vT100ms 10
#define vT01S 100 // 1 s = 10 ms * 100
#define vT0HVal 0xfe //0xff //0xfe //0xf6
#define vT0LVal 0x33 //0x9c //0x0c //0x4c
uchar code display_AD_channel_ID[2] = {0x00,0x01};
static unsigned char data CS;
uchar data AD_channel_result[2][5]; //各通道A/D轉換結果。前是通道號;后是轉換的值
uint cT01ms;
uchar cT10ms;
uchar cT100ms;
uchar cT01s;
uchar THTL;
bit OutFlag;
void delay_ms(register uint Count){
register uchar T;
for(;Count》0;Count--){
for(T=0;T《80;T++){
_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
}
DogReset();
}
}
void send_char_com(unsigned char OutData){
SBUF = OutData; //輸出字符
while(!TI); //空語句判斷字符是否發完
TI = 0; //清TI
}
void send_string_com(uchar *str,uchar strlen){
uchar i;
for(i=strlen; i》0; i--){
send_char_com(*str);
str++;
DogReset();
}
}
uchar Ad_Change(uchar channel){
uint AD_Result_Temp = 0 ;
//---------------------將P1.0--P1.1設置成適合AD轉換的模式
/// P1 = 0xff; //將P1口置高,為A/D轉換作準備
ADC_CONTR = ADC_CONTR|0x80; //1000,0000打開A/D轉換電源
P1M0 = 0x03; //0000,0011用于A/D轉換的P1.x口,先設為開漏
P1M1 = 0x03; //0000,0011P1.0--P1.1先設為開漏。斷開內部上拉電阻
delay_ms(20); //20
ADC_CONTR = ADC_CONTR&0xE0; //1110,0000 清ADC_FLAG,ADC_START位和低3位
ADC_CONTR = ADC_CONTR|(display_AD_channel_ID[channel]&0x07); //設置當前通道號
delay_ms(1); //延時使輸入電壓達到穩定
ADC_DATA = 0; //清A/D轉換結果寄存器
ADC_LOW2 = 0;
ADC_CONTR = ADC_CONTR|0x08; //0000,1000ADCS = 1,啟動轉換
do { DogReset();}
while((ADC_CONTR & 0x10)==0); //0001,0000等待A/D轉換結束
ADC_CONTR = ADC_CONTR&0xE7; //1110,0111清ADC_FLAG位,停止A/D轉換
AD_Result_Temp = ((AD_Result_Temp|ADC_DATA)《《2)|(ADC_LOW2&0x03);
//保存返回AD轉換的 結果
//----------------------------轉換成可由串口顯示的字符
AD_channel_result[channel][0] = AD_Result_Temp/1000+0x30;
AD_channel_result[channel][1] = (AD_Result_Temp%1000)/100+0x30;
AD_channel_result[channel][2] = (AD_Result_Temp%100)/10+0x30;
AD_channel_result[channel][3] = AD_Result_Temp%10+0x30;
//------------------------串口監視
// send_char_com(ADC_DATA); //////發送轉換 的 到的 值,這里只是 高8位,值的轉換需要考慮
// send_char_com(ADC_LOW2); //////發送轉換 的 到的 值,這里只是 低2位,值的轉換需要考慮
// send_string_com(AD_channel_result[channel],4);
delay_ms(10); //
return(ADC_DATA);
}
uchar AD_Filter(void){
uchar i;
uchar cTemp[32];
uchar cAverage;
for(i=32;i》0;i--){
cTemp[i]=Ad_Change(0);
cAverage=((cAverage+cTemp[i])》》1);
}
return(cAverage);
}
void InitCom(unsigned char BaudRate){
switch (BaudRate){
case 1: THTL = 64; break; //波特率300
case 2: THTL = 160; break; //600
case 3: THTL = 208; break; //1200
case 4: THTL = 232; break; //2400
case 5: THTL = 244; break; //4800
case 6: THTL = 250; break; //9600
case 7: THTL = 253; break; //19200
case 8: THTL = 255; break; //57600
default: THTL = 208; break; //1200
}
}
void Chip_initial(void){
IE=0;
// 定時器控制字初始化
TMOD=0x21; // 定時器1為方式2,定時器0為方式1
TCON=0x50; // 設置外部中斷類型
T2CON=0x0d; // 選擇定時器1為波特率發生器,T2為捕獲工作方式
// ET2=1;
ET0=1; // 允許定時器0、定時器2中斷
// 外部中斷設置
EX0=0; // FFSK中斷初始時關閉,有載波時再開啟
EX1=0;
IT1=1; // 外部中斷0、1均為下降沿觸發
IT0=1;
// 啟動定時器0
TH0=vT0HVal; // 啟動定時器0
TL0=vT0LVal;
TR0=1;
InitCom(6); //設置波特率為9600 1-7波特率300-19200
SCON = 0x50; //串口方式1,允許接收
TH1 = THTL;
TL1 = THTL;
PCON = 0x80; //波特率加倍控制,SMOD位
RI = 0; //清收發標志
TI = 0;
TR1 = 1; //啟動定時器
IP=0x02; //PT2=1
IPH=0x02; //PT2H=1,PT0H=1
EA=1;
delay_ms(10); // 延時是為了避免定時器0無法產生中斷的問題
}
void Para_initial(void){
OutFlag=0;
cT01ms = vT01ms;
cT10ms = vT10ms;
// cT100ms = vT100ms;
cT01s = vT01S;
CS = 0; //設置CS為0不選任何的音源,如為1則選第1路
}
void system_initial(void){
Chip_initial();
Para_initial();
DogReset(); // 已針對 STC89C58RD+ 作修改.06-04-06
}
void main(void){
system_initial();
while(1){
DogReset();
if(OutFlag){
OutFlag=0;
send_char_com(AD_Filter());
}
}
}
void Trint0(void) interrupt 1 using 1{
TR0=0; // 時基1mS
TH0=vT0HVal;
TL0=vT0LVal;
TR0=1;
TF0=0;
if(!(--cT01ms)){
cT01ms=vT01ms;
if(!(--cT10ms)){
cT10ms=vT10ms;
if(!(--cT01s)){
cT01s=vT01S;
OutFlag=1;
}
}
}
}
void ComInINT(void) interrupt 4 {
if (RI){ //判斷是不收完字符
switch(SBUF){
case 0x61: CS = 1; break; //根據SBUF設置CS 接收‘abcde’調試方便
case 0x62: CS = 2; break;
case 0x63: CS = 3; break;
case 0x64: CS = 4; break;
case 0x65: CS = 0; break;
}
P1 = 255; //P1口全為高電平,4-7通過反相為低不選任何音源,0-3為高用于讀取按鍵
RI = 0; //RI清零
}
}
小編推薦閱讀:











 工商網監
工商網監
評論