 電子發燒友App
電子發燒友App


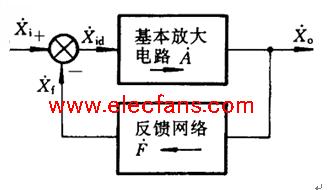
閉環控制是控制論的一個基本概念。指作為被控的輸出以一定方式返回到作為控制的輸入端,并對輸入端施加控制影響的一種控制關系。在控制論中,閉環通常指輸出端通過“旁鏈”方式回饋到輸入,所謂閉環控制。輸出端回饋到輸入端并參與對輸出端再控制,這才是閉環控制的目的,這種目的是通過反饋來實現的。
閉環反饋控制是基于反饋原理建立的自動控制。所謂反饋原理,就是根據系統輸出變化的信息來進行控制,即通過比較系統行為(輸出)與期望行為之間的偏差,并消除偏差以獲得預期的系統性能。在閉環反饋控制中,既存在由輸入到輸出的信號前向通路,也包含從輸出端到輸入端的信號反饋通路,兩者組成一個閉合的回路。閉環反饋控制是自動控制的主要形式。在工程上常把在運行中使輸出量和期望值保持一致的閉環反饋控制系統稱為自動調節系統,而把用來精確地跟隨或復現某種過程的反饋控制系統稱為伺服系統或隨動系統。
概念
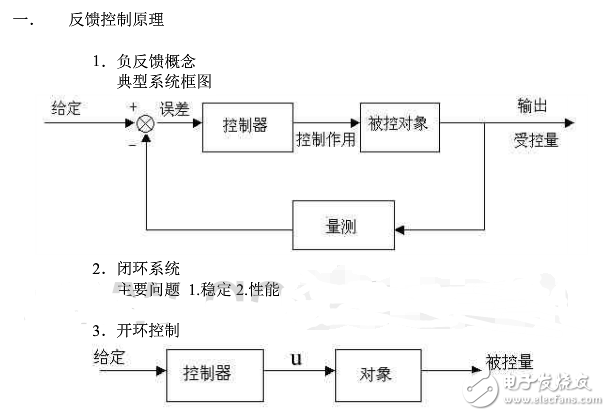
控制過程中,沒有反饋環節,不能對控制結果加以修正、調節,是個單程的控制流向。這種控制,稱為開環控制。閉環控制有反饋環節,通過反饋系統是系統的精確度提高。開環控制沒有反饋環節,系統的穩定性不高,響應時間相對來說很長,精確度不高,試用于對系統穩定性精確度要求不高的簡單的系統。閉環反饋控制有反饋環節,通過反饋系統是系統的精確度提高,響應時間縮短,適合于對系統的響應時間、穩定性要求高的系統。
采用閉環反饋控制,可以有效地抑制被反饋通道(由輸出到輸入)所包圍的前向通道(由輸入到輸出)中各種干擾對系統輸入量的影響,改善了系統的靜態準確度。同時,因負反饋的存在,對應于一定輸出量的輸入量必然加大,使控制器受到強激信號作用,可加快被控對象的輸出量對輸入量的跟蹤速度, 獲得快速響應的效果, 改善了系統的動態特性。缺點是如果控制器的強激信號作用與被控對象慣性之間匹配不當,負反饋控制系統內可能產生振蕩,甚至不能穩定工作;使用的元件多,線路復雜,系統的分析和設計都比較麻煩;比較被動。
閉環反饋控制原理
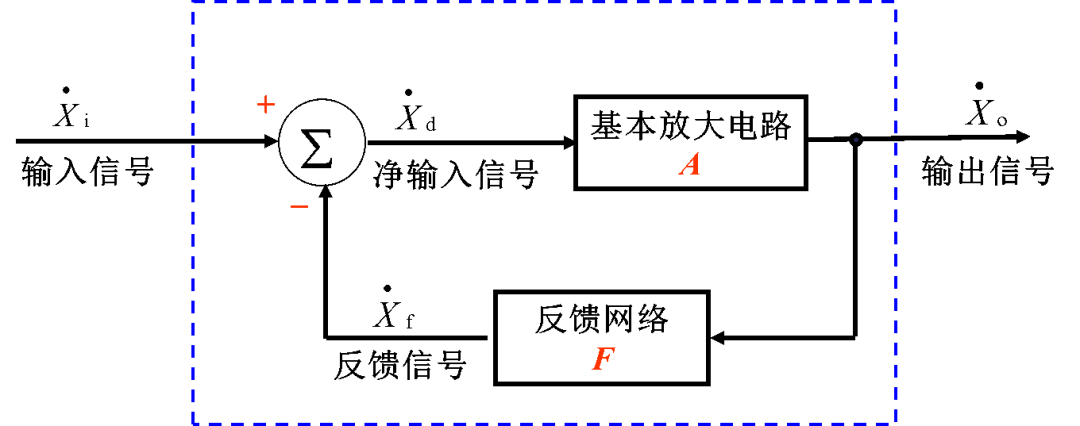
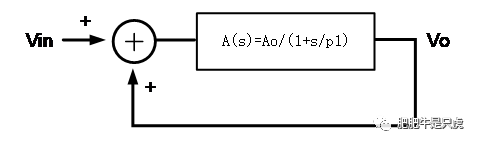
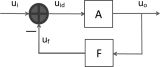
當受控客體受干擾的影響,其實現狀態與期望狀態出現偏差時,控制主體將根據這種偏差發出新的指令,以糾正偏差,抵消干擾的作用。在閉環反饋控制中,由于控制主體能根據反饋信息發現和糾正受控客體運行的偏差,所以有較強的抗干擾能力,能進行有效的控制,從而保證預定目標的實現。管理中所實行的控制大多是閉環控制,所用的控制原理主要是反饋原理。這種控制如果我們把輸入值用x表示,輸出值用y表示,客體的功能用s表示,控制系統也即反饋系統的作用用R表示,偏差信息用△x表示,則有:y=S(X+△X)=S(X+Ry)=SX+SRy式中R稱反饋因子或控制參數,它反映閉環控制系統的反饋功能或控制功能。
分類
負反饋(negative feedback):凡反饋信息的作用與控制信息的作用方向相反,對控制部分的活動起制約或糾正作用的,稱為負反饋。意義是維持穩態,缺點是滯后、波動。
正反饋(positive feedback ):凡反饋信息的作用與控制信息的作用方向相同,對控制部分的活動起增強作用的,稱為正反饋。意義:加速生理過程,使機體活動發揮最大效應。
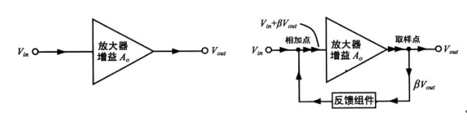
閉環反饋控制把取出的輸出量回送到輸入端,并與指令信號比較產生偏差的過程。指令信號與被控量相減為負反饋,相加則為正反饋。不做特別說明,一般指負反饋。閉環反饋控制就是采用負反饋并利用偏差進行控制的過程,是自動控制系統中最基本的控制方式。
根據自動控制原理,反饋控制的閉環系統是按被調量的偏差進行控制的系統,只要被調量出現偏差,它就會自動產生糾正偏差的作用。
調速系統的轉速降落正是由負載引起的轉速偏差,顯然,引入轉速閉環將使調速系統應該能夠大大減少轉速降落
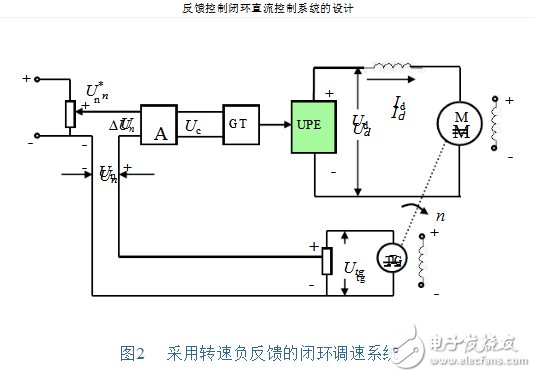
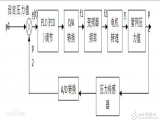
在反饋控制的閉環直流調速系統中,與電動機同軸安裝一臺測速發電機 TG ,從而引出與被調量轉速成正比的負反饋電壓Un ,與給定電壓 Un 相比較后,得到轉速偏差電壓 ?Un ,經過放大器 A,產生電力電子變換器UPE的控制電壓Uc ,用以控制電動機轉速 n。
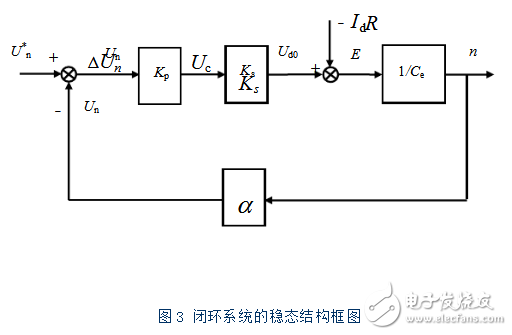
在閉環調速系統中,引入轉速負反饋的后,當放大系統足夠大時,就可以滿足系統的穩態性能(靜差率)的要求。然而放大系數太大可能引起閉環系統的不穩定,這時應增加動態校正措施,才能保證系統的正常工作。














 工商網監
工商網監
評論