 電子發燒友App
電子發燒友App


一、最短路徑簡介
用于計算一個節點到其他所有節點的最短路徑。主要特點是以起始點為中心向外層層擴展,直到擴展到終點為止。Dijkstra算法能得出最短路徑的最優解,但由于它遍歷計算的節點很多,所以效率低。
二、動態規劃求解問題的思路
在《算法導論》上,動態規劃的求解過程主要分為如下的四步:
描述最優解的結構
遞歸定義最優解的值
按自底向上的方式計算最優解的值
由計算出的結果構造一個最優解
在利用動態規劃求解的過程中值得注意的就是是否包含最優子結構,簡單來講就是一個問題的最優解是不是包含著子問題的最優解。利用求解子問題的最優解最后得到整個問題的最優解,這是利用動態規劃求解問題的基本前提。
三、利用動態規劃求解最短路徑問題
在解決這個問題的過程中,我其實是在嘗試著使用不同的工具,首先我想對這種圖處理,我使用了Gephi,Gephi是我在學習復雜網絡的時候學會的一個工具,這個工具可以很方便的處理網絡數據,能夠動態的生成圖的結構,下面是我用Gephi畫出的圖:
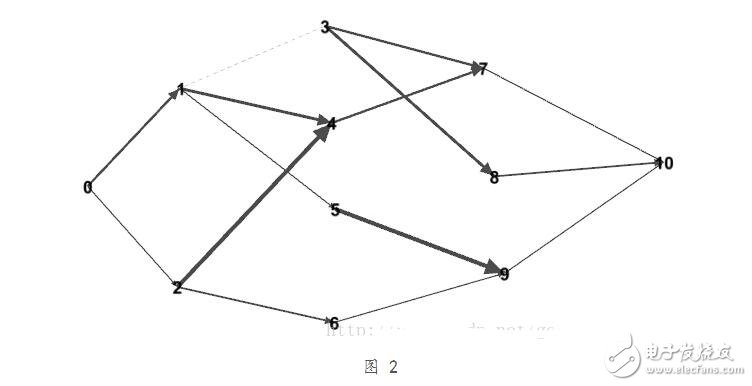
Gephi的另一個比較重要的工具就是可以在生成圖的過程中,將圖的數據導出,導出的數據可以方便的使用。
還是重點說說我是怎么利用動態規劃的思想去求解這樣的最短路徑問題的:
1、描述最優解的結構
要使得從0到10的距離最短,令 為到第個節點的最短距離,則
為到第個節點的最短距離,則 用同樣的方法可以求得
用同樣的方法可以求得 等。
等。
2、遞歸定義最優解的值

其中表示與邊有連接的節點,而且 。
。
3、按自底向上的方式計算每個節點的最優值
此時我們就得利用遞歸公式分別求解 ,這樣最終便能得到最終的解。
,這樣最終便能得到最終的解。
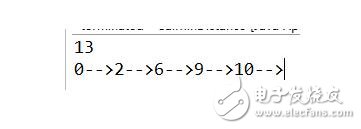
結果為:
最短路徑解決方法
用于解決最短路徑問題的算法被稱做“最短路徑算法”, 有時被簡稱作“路徑算法”。 最常用的路徑算法有:
Dijkstra算法
SPFA算法\Bellman-Ford算法
Floyd算法\Floyd-Warshall算法
Johnson算法
A*算法
所謂單源最短路徑問題是指:已知圖G=(V,E),我們希望找出從某給定的源結點S∈V到V中的每個結點的最短路徑。
?
首先,我們可以發現有這樣一個事實:如果P是G中從vs到vj的最短路,vi是P中的一個點,那么,從vs沿P到vi的路是從vs到vi的最短路。
JAVA實現:
[java] view plain copypackage org.algorithm.dynamicprogramming;
import java.io.BufferedReader;
import java.io.File;
import java.io.FileNotFoundException;
import java.io.FileReader;
import java.io.IOException;
import java.io.Reader;
import java.util.ArrayList;
import java.util.Iterator;
import java.util.List;
import java.util.Stack;
/**
* 利用動態規劃求解最短路徑問題
*
* @author dell
*
*/
public class CalMinDistance {
// 計算最短的距離
public static int[] calMinDistance(int distance[][]) {
int dist[] = new int[distance.length];
dist[0] = 0;
for (int i = 1; i 《 distance.length; i++) {
int k = Integer.MAX_VALUE;
for (int j = 0; j 《 i; j++) {
if (distance[j][i] != 0) {
if ((dist[j] + distance[j][i]) 《 k) {
k = dist[j] + distance[j][i];
}
}
}
dist[i] = k;
}
return dist;
}
// 計算路徑
public static String calTheRoute(int distance[][], int dist[]) {
Stack《Integer》 st = new Stack《Integer》();
StringBuffer buf = new StringBuffer();
int j = distance.length - 1;
st.add(j);// 將尾插入
while (j 》 0) {
// int num = 0;
for (int i = 0; i 《 j; i++) {
if (distance[i][j] != 0) {
// num++;
if (dist[j] - distance[i][j] == dist[i]) {
st.add(i);
}
}
}
j = st.peek();
}
while (!st.empty()) {
buf.append(st.pop()).append(“--》”);
}
return buf.toString();
}
// 讀取文件
@SuppressWarnings(“resource”)
public static int[][] readTheFile(File f) {
Reader input = null;
try {
input = new FileReader(f);
} catch (FileNotFoundException e) {
// TODO Auto-generated catch block
e.printStackTrace();
}
BufferedReader buf = null;
buf = new BufferedReader(input);
List《String》 list = new ArrayList《String》();
try {
String str = buf.readLine();
while (str != null) {
list.add(str);
str = buf.readLine();
}
} catch (IOException e) {
// TODO Auto-generated catch block
e.printStackTrace();
}
Iterator《String》 it = list.iterator();
int distance[][] = new int[11][11];
while (it.hasNext()) {
String str1[] = it.next().split(“,”);
int i = Integer.parseInt(str1[0]);
int j = Integer.parseInt(str1[1]);
distance[i - 1][j - 1] = Integer.parseInt(str1[2]);
}
return distance;
}
public static void main(String args[]) {
// 讀文件
File f = new File(“D:” + File.separator + “distance_1.csv”);
int distance[][] = readTheFile(f);
int dist[] = calMinDistance(distance);
System.out.println(“最短路徑長度為:” + dist[distance.length - 1]);
System.out.println(“最短路徑為:” + calTheRoute(distance, dist));
}
}
?
























 工商網監
工商網監
評論