 電子發燒友App
電子發燒友App


波特圖的定義
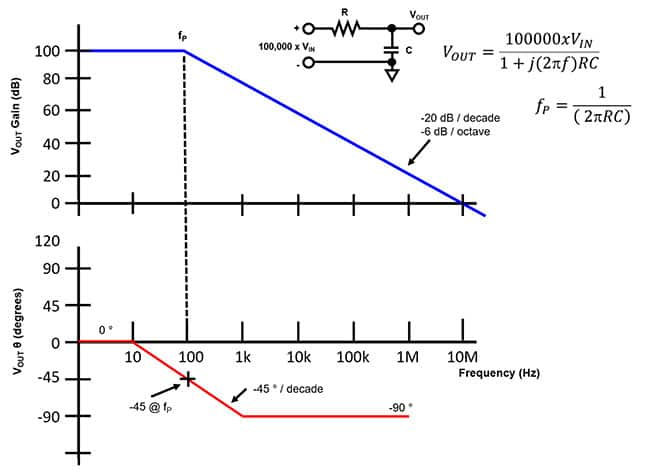
波特圖是線性非時變系統的傳遞函數對頻率的半對數坐標圖,其橫軸是頻率,縱軸以對數尺度(logscale)表示,利用波特圖可以看出系統的頻率響應。波特圖一般是由二張圖組合而成,一張幅頻圖表示頻率響應增益的分貝值對頻率的變化,另一張相頻圖則是頻率響應的相位對頻率的變化。
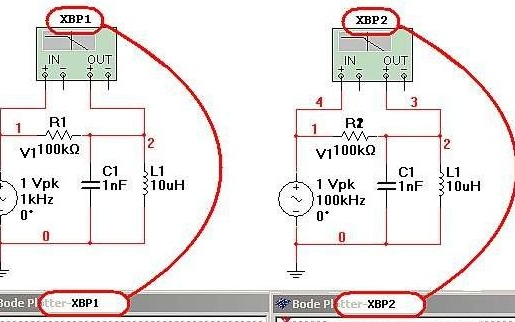
波特圖可以用電腦軟件(如MATLAB)或儀器繪制,也可以自行繪制。利用波特圖可以看出在不同頻率下,系統增益的大小及相位,也可以看出大小及相位隨頻率變化的趨勢。
波特圖的圖形和系統的增益,極點、零點的個數及位置有關,只要知道相關的資料,配合簡單的計算就可以畫出近似的波特圖,這是使用波特圖的好處。
波特圖(Bode Plots)
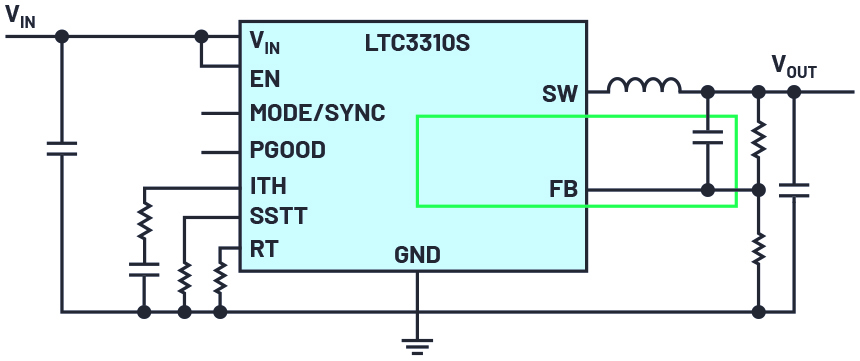
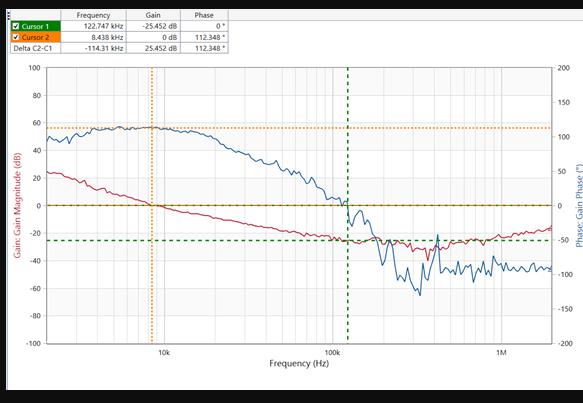
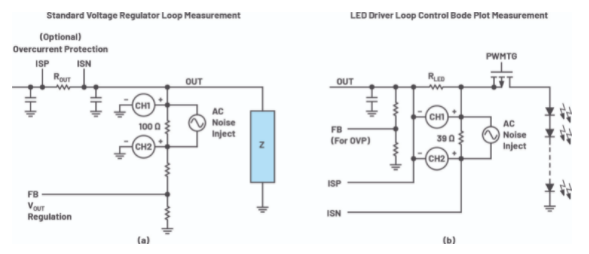
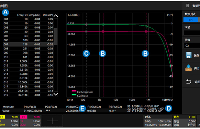
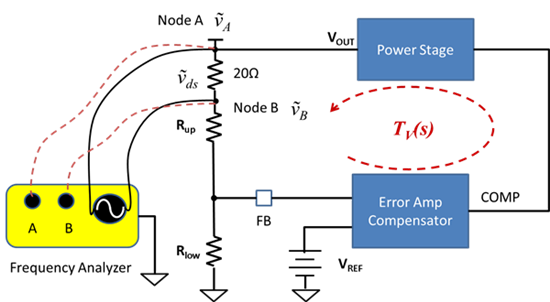
波特圖(Bode Plots)可用來確認回路的穩定性,回路的增益(Loop Gain,單位:dB)是頻率(Frequency)的函數(圖5:典型的波特圖)。 回路增益可以用網絡分析儀(Network Analyzer)測量。 網絡分析儀向反饋回路(Feedback Path)注入低電平的正弦波(Sine Wave),隨著直流電壓(DC)的不斷升高, 這些正弦波信號完成掃頻,直到增益下降到0dB。然后測量增益的響應(Gain Response)。

圖5
波特圖是很方便的工具,它包含判斷閉環系統(Closed-loop System)穩定性的所有必要信息。 包括下面幾個關鍵參數:環路增益(Loop Gain),相位裕度(Phase Margin)和零點(Zeros)、極點(Poles)。
波特圖分析
用包含三個極點和一個零點的波特圖(圖11:波特圖)來分析增益和相位裕度。

圖11
假設直流增益(DC gain)為80dB,第一個極點(pole)發生在100Hz處。在此頻率,增益曲線的斜度變為-20dB/十倍頻程。1kHz處的零點使斜度變為0dB/十倍頻程,到10kHz處斜度又變成-20dB/十倍頻程。在100kHz處的第三個也是最后一個極點將斜度最終變為-40dB/十倍頻程。
圖11中可看到單位增益點(Unity Gain Crossover,0dB)的交點頻率(Crossover Frequency)是1MHz。0dB頻率有時也稱為回路帶寬(Loop Bandwidth)。
相位偏移圖表示了零、極點的不同分布對反饋信號的影響。為了產生這個圖,就要根據分布的零點、極點計算相移的總和。在任意頻率(f)上的極點相移,可以通過下式計算獲得: 極點相移 = -arctan(f/fp) (6)
在任意頻率(f)上的零點相移,可以通過下式計算獲得: 零點相移 = -arctan(f/fz) (7)
此回路穩定嗎?為了回答這個問題,我們根本無需復雜的計算,只需要知道0dB時的相移(此例中是1MHz)。
前兩個極點和第一個零點分布使相位從-180°變到+90°,最終導致網絡相位轉變到-90°。最后一個極點在十倍頻程中出現了0dB點。代入零點相移公式,可以計算出該極點產生了-84°的相移(在1MHz時)。加上原來的-90°相移,全部的相移是-174°(也就是說相位裕度是6°)。由此得出結論,該回路不能保持穩定,可能會引起振蕩。

















 工商網監
工商網監
評論