 電子發燒友App
電子發燒友App


PWM這個功能在飛思卡爾、STM32等高檔的單片機內部有專用的模塊,用此類芯片實現PWM功能時只需要通過設置相應的寄存器就可實現周期和占空比的控制。但是如果要用51單片機的話,也是可以的,但是比較的麻煩。此時需要用到內部定時器來實現,可用兩個定時器實現,也可以用一個定時器實現。
用兩個定時器的方法是用定時器T0來控制頻率,定時器T1來控制占空比。大致的的編程思路是這樣的:T0定時器中斷讓一個I0口輸出高電平,在這個定時器T0的中斷當中起動定時器T1,而這個T1是讓IO口輸出低電平,這樣改變定時器T0的初值就可以改變頻率,改變定時器T1的初值就可以改變占空比。
下面重點介紹用一個定時器的實現PWM的方法。因為市面上的智能小車所采用的電機大多數為TT減速電機,通過反復的實驗,此電機最佳的工作頻率為1000HZ(太高容易發生哨叫,太低電機容易發生抖動),所以下面以周期為1ms(1000HZ)進行舉例,要產生其它頻率的PWM波,程序中只需作簡單修改即可。
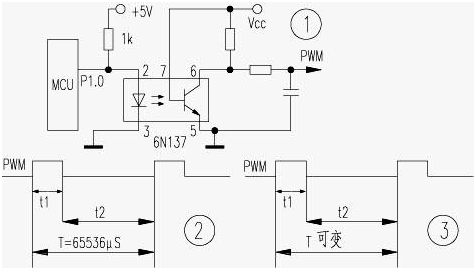
用一個定時器時(如定時器T0),首先你要確定PWM的周期T和占空比D,確定了這些以后,你可以用定時器產生一個時間基準t,比如定時器溢出n次的時間是PWM的高電平的時間,則D*T=n*t,類似的可以求出PWM低電平時間需要多少個時間基準n。
因為這里我們是產生周期為1ms(1000HZ)的PWM,所以可設置中斷的時間間隔為0.01ms,,然后中斷100次即為1ms。在中斷子程序內,可設置一個變量如time,在中斷子程序內,有三條重要的語句:1、當time>=100時,time清零(此語句保證頻率為1000HZ),2、當time>n時(n應該在0-100之間變化開),讓單片相應的I/O口輸出高電平,當 time
2、程序1,使單片機的I/O口輸出固定頻率的PWM波
下面按上面的思路給出一個具體程序:
/*******************************************************************/
/*程序名:單片機輸出固定頻率的PWM波*/
/*晶振:11.00592 MHz CPU型號:STC89C52 */
/*功能:P2^0口輸出周期為1ms(1000HZ),占空比為%80的PWM波*/
/*****************************************************************/
#include
#define uint unsigned int
#define uchar unsigned char
sbit PWM1=P2^0;//接IN1控制正轉
sbit PWM2=P2^1;//接IN2控制反轉
uchar time;
void main()
{
TMOD=0x01;//定時器0工作方式1
TH0=0xff;//(65536-10)/256;//賦初值定時
TL0=0xf7;//(65536-10)%256;//0.01ms
EA=1;//開總中斷
ET0=1;//開定時器0中斷
TR0=1;//啟動定時器0
while(1)
{
}
}
void delay(uint z)
{
uint x,y;
for(x=z;x》0;x--)
for(y=500;y》0;y--);
}
void tim0() interrupt 1
{
TR0=0;//賦初值時,關閉定時器
TH0=0xff;//(65536-10)/256;//賦初值定時
TL0=0xf7;//(65536-10)%256;//0.01ms
TR0=1;//打開定時器
time++;
if(time》=100) time=0;//1khz
if(time《=20) PWM1=0;//點空比%80
else PWM1=1;
PWM2=0;
}
程序說明:
1、關于頻率的確定:對于11.0592M晶振,PWM輸出頻率為1KHZ,此時設定時器0.01ms中斷一次,時中斷次數100次即為1KHZ( 0.01ms*100=1ms,即為1000HZ)此時, 定時器計數器賦初值為TH0=FF,TL0=F7。
2、關于占空比的確定:此時我們將來time的值從0-100之間進行改變,就可以將占空比從%0-%100之間進行變化,上面程序中time《=20時PWM1=0; else PWM1=1;意思就是%20的時間輸出低電平,%80的時間輸出高電平,即占空比為%80。如需得到其它占空比,如%60,只需將time的值改為40即可。(程序為if(time《=40) PWM1=0;else PWM1=1;)
當然編寫程序時也可以定義一個標志位如flag,根據flag的狀態決定輸出高平還是低電平,假設定義flag=1的時候輸出高電平,用一個變量去記錄定時器中斷的次數,每次中斷就讓記錄中斷次數的變量+1,在中斷程序里面判斷這個變量的值是否到了n,如果到了說明高電平的時間夠了,那么就改變flag為0,輸出低電平,同時記錄中斷變量的值清零,每次中斷的時候依舊+1,根據flag=0的情況跳去判斷記錄變量的值是否到了n如果到了,說明PWM的低電平時間夠了,那么就改flag=1,輸出改高電平,同時記錄次數變量清零,重新開始,如此循環便可得到你想要的PWM波形,這種方法我們這里不在舉例,請自己去試著書寫。
3、程序2,使用單片機I/O口輸出PWM波,并能通過按鍵控制正反轉
在程序中我們通常需要控制電機的正反轉,如通過一個按鍵控制正反轉,此時我們也可以設置一個標志位如flag。在主程序中當按鍵每次被按下時,flag相應取反。然后在子程序中當flag為1時,進行正轉程序,當flag為0時執行反轉程序。下面的程序功能為單片機I/O口P2^0、P2^1輸出1000HZ,占空比為%50,并能過P3^7按鍵控制正電機的正反轉。
/*******************************************************************/
/*程序名:PWM直流電機調速*/
/*晶振:11.00592 MHz CPU型號:STC89C52 */
/*功能:直流電機的PWM波控制,可以通過按鍵控制正反轉*/
/*****************************************************************/
#include
#define uint unsigned int
#define uchar unsigned char
uchar time,count=50,flag=1;//低電平的占空比
sbit PWM1=P2^0;//PWM通道1,反轉脈沖
sbit PWM2=P2^1;//PWM通道2,正轉脈沖
sbit key_turn=P3^7; //電機換向
/************函數聲明**************/
void delayxms(uint z);
void Motor_turn(void);
void timer0_init(void);
/*********主函數********************/
void main(void)
{
timer0_init();
while(1)
{
Motor_turn();
}
}
/****************延時處理**********************/
void delayxms(uint z)//延時xms程序
{
uint x,y;
for(y=z;x》0;x--)
for(y=110;y》0;y--);
}
/************電機正反向控制**************/
void Motor_turn(void)
{
if(key_turn==0)
{
delayxms(2);//此處時間不能太長,否者會的中斷產生沖突
if(key_turn==0)
{
flag=~flag;
}
while(!key_turn);
}
}
/***********定時器0初始化***********/
void timer0_init(void)
{
TMOD=0x01; //定時器0工作于方式1
TH0=(65536-10)/256;
TL0=(65536-10)%256;
TR0=1;
ET0=1;
EA=1;
}
/**************定時0中斷處理******************/
void timer0_int(void) interrupt 1
{
TR0=0;//設置定時器初值期間,關閉定時器
TH0=(65536-10)/256;
TL0=(65536-10)%256;
TR0=1;
if(flag==1)//電機正轉
{
PWM1=0;
time++;
if(time{
PWM2=1;
}
else
PWM2=0;
if(time》=100)
{
time=0;
}
}
else //電機反轉
{
PWM2=0;
time++;
if(time{
PWM1=1;
}
else
PWM1=0;
if(time》=100)
{
time=0;
}
}
}
4、程序4、使單片機輸出PWM,并能控制正反轉和實現調速
為了使大家徹底掌握此方面,下面再給出一個復雜一點的程序,實現的功能為通過一個按鍵控制正反轉并通過另外兩個按鍵使之可以在0到20級之間調速的程序。
/*******************************************************************/
/*程序名:PWM直流電機調速*/
/*晶振:11.00592 MHz CPU型號:STC89C52 */
/*直流電機的PWM波控制,可以通過按鍵控制正反轉并在0到20級之間調速*/
/*****************************************************************/
#include
#define uint unsigned int
#define uchar unsigned char
uchar time,count=50,flag=1;//低電平的占空比
sbit PWM1=P2^0;//PWM通道1,反轉脈沖
sbit PWM2=P2^1;//PWM通道2,正轉脈沖
sbit key_add=P3^5;//電機加速
sbit key_dec=P3^6;//電機減速
sbit key_turn=P3^7;//電機換向
/************函數聲明**************/
void delayxms(uint z);
void Motor_turn();
void Motor_add();
void Motor_dec();
void timer0_init();
/*********主函數********************/
void main()
{
timer0_init();
while(1)
{
Motor_turn();
Motor_add();
Motor_dec();
}
}
/****************延時處理**********************/
void delayxms(uint z)//延時xms程序
{
uint x,y;
for(y=z;x》0;x--)
for(y=110;y》0;y--);
}
/************電機正反向控制**************/
void Motor_turn()
{
if(key_turn==0)
{
delayxms(2);//此處時間不能太長,否者會的中斷產生沖突
if(key_turn==0)
{
flag=~flag;
}
while(!key_turn);
}
}
void Motor_add()//電機加速
{
if(key_add==0)
{
delayxms(2);//此處時間不能太長,否者會的中斷產生沖突
if(key_add==0)
{
count+=5;
if(count》=100)
{
count=0;
}
}
while(!key_add);
}
}
void Motor_dec()//電機加減速
{
if(key_dec==0)
{
delayxms(2);//此處時間不能太長,否者會的中斷產生沖突
if(key_dec==0)
{
count-=5;
if(count》=100)
{
count=0;
}
}
while(!key_dec);
}
}
/***********定時器0初始化***********/
void timer0_init()
{
TMOD=0x01; //定時器0工作于方式1
TH0=(65536-10)/256;
TL0=(65536-10)%256;
TR0=1;
ET0=1;
EA=1;
}
/**************定時0中斷處理******************/
void timer0_int() interrupt 1
{
TR0=0;//設置定時器初值期間,關閉定時器
TH0=(65536-10)/256;
TL0=(65536-10)%256;
TR0=1;
if(flag==1)//電機正轉
{
PWM1=0;
time++;
if(time{
PWM2=1;
}
else
PWM2=0;
if(time》=100)
{
time=0;
}
}
else //電機反轉
{
PWM2=0;
time++;
if(time{
PWM1=1;
}
else
PWM1=0;
if(time》=100)
{
time=0;
}
}
}
5、利用單片機輸出PWM簡單控制小車直行
相信通過上面的講解,大家已經能夠很好的撐握如何利用51單片機產生PWM波下面給出一個程序,通過單片機兩個I/O口輸出PWM波,讓小車直行。
#include
#define uint unsigned int
#define uchar unsigned char
sbit PWM1=P2^0;//接IN1控制正轉
sbit PWM2=P2^1;//接IN2控制反轉
sbit PWM3=P2^2;//接IN3控制正轉
sbit PWM4=P2^3;//接IN4控制反轉
sbit PWM5=P2^4;//接IN3控制正轉
sbit PWM6=P2^5;//接IN4控制反轉
sbit PWM7=P2^6;//接IN3控制正轉
sbit PWM8=P2^7;//接IN4控制反轉
uchar time;
void main()
{
TMOD=0x01;//定時器0工作方式1
TH0=0xff;//(65536-10)/256;//賦初值定時
TL0=0xf7;//(65536-10)%256;//0.01ms
EA=1;//開總中斷
ET0=1;//開定時器0中斷
TR0=1;//啟動定時器0
while(1)
{
}
}
void delay(uint z)
{
uint x,y;
for(x=z;x》0;x--)
for(y=500;y》0;y--);
}
void tim0() interrupt 1
{
TR0=0;//賦初值時,關閉定時器
TH0=0xff;//(65536-10)/256;//賦初值定時
TL0=0xf7;//(65536-10)%256;//0.01ms
TR0=1;//打開定時器
time++;
if(time》=100) time=0;//1khz
PWM2=0;
PWM4=0;
if(time《=75) PWM1=1;
else PWM1=0;
if(time《=80) PWM3=1;
else PWM3=0;
PWM6=0;
PWM8=0;
if(time《=50) PWM5=1;
else PWM5=0;
if(time《=50) PWM7=1;
else PWM7=0;
}









 工商網監
工商網監
評論