坐標系:為確定機器人的位置和姿態而在機器人或空間上進行的位置指標系統。
2017-02-19 12:03:09 32349
32349 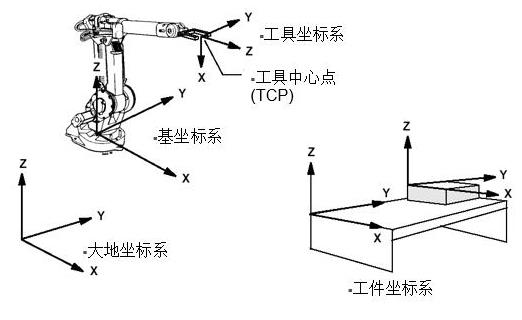
dx/tree/cocos2d-x-2.2.6-ohos/),后續會提交合入到Cocos的GitHub官網,歡迎廣大游戲開發者踴躍嘗試基于2.2.6引擎做游戲開發和移植。開源共建,繁榮OpenHarmony
2023-04-11 10:00:23
目錄1. 引言2. 連桿坐標系3 DH參數3.1 DH參數的介紹3.2 DH參數定義3.2.1 連桿長度和扭角3.2.2 連桿轉角和連桿偏距4. 解決問題5. 總結1. 引言??前面的文章我們一直在
2021-09-01 06:17:14
頻率同步旋轉的(d,q)坐標系經過此項變換后三相對稱靜止坐標系中的基波正弦變量將轉換成 同步旋轉坐標系中的直流量我不明白在于,【1】基波正弦交流量為什么就可以變成直流量了呢?【2】經過坐標變換后,為什么旋轉的頻率就是電網的基波頻率?諧波呢?
2017-10-25 14:04:53
一、坐標變換1.1. 三相靜止坐標系(abcabcabc)和兩相靜止坐標系(α/β\alpha/\betaα/β)之間的變換根據圖中所示abcabcabc坐標系和αβ\alpha\betaαβ坐標系
2021-08-27 06:18:07
`如何建立一個具有特定角度的坐標系,并讓矩形ROI隨坐標系旋轉?`
2017-09-18 13:41:57
首先坐標系轉換的變換矩陣(沒有坐標系矩陣變換的概念可先百度)如圖:
2019-06-20 18:34:32
首先關注一下電機學的相關知識,我們都知道ABC三相在坐標系中的順序是,A相超前于B相120度,B相超前于C相120度,所以ABC按順時針排列。同時三相電流的公式也說明了這個問題。還可以這么理解這上面講的很好。但是在電機學中,ABC相軸線的排列不是那么回事,如圖所...
2021-08-27 06:32:32
1. A、B、C三相坐標系中PMSM數學模型定子電壓方程:結論:在A、B、C坐標系下,可以看出電壓方程和磁鏈方程比較復雜,磁鏈的數值隨永磁同步電機定轉子之間的相對位置隨時間而變化,而電機運動方程
2021-08-27 07:59:14
(W)/3點(3)/X/Y/Z/Z 軸(ZA)] ,輸入【3】后按回車鍵確認,使用三點定義一個新的用戶坐標系(UCS)。如下圖所示:3、在命令行輸入快捷命令【PLAN】后按回車鍵確認。4、接著根據
2019-12-16 15:37:17
垂直的坐標軸構成。其中,水平方向的坐標軸為X軸,垂直方向的坐標軸為Y軸。例如,某點的直角坐標為(3,4)。2、極坐標系極坐標系由一個極點和一個極軸構成,極軸的方向為水平向右。平面上任何一點P都可以由該點到極點的連線長度L(>0)和連線與極軸的交角a所定義,即用一對坐標值(L
2020-09-23 10:28:54
坐標,根據測量單位給出的紅線界點插入一個坐標對象,設置該點的坐標值作為基準坐標;2. 根據基準坐標進行各個坐標點的標注;注意: 如果需要創建多個坐標系,可以通過新建基準坐標和拾取基準坐標命令進行
2021-06-06 14:30:56
LabVIEW怎樣確定控件在顯示器坐標系中的位置想知道VI中控件的位置,但是當使用該控件的位置屬性時,與之相關聯的是LabVIEW原點,而不是顯示器原點。該如何確定該控件在顯示器坐標系中的位置。解答
2022-04-12 20:44:07
? LabVIEW確定控件在顯示器坐標系中的位置想知道一個VI中控件的位置,但是當使用該控件的位置屬性時,與之相關聯的是LabVIEW原點,而不是顯示器原點。該如何確定該控件在顯示器坐標系中的位置
2022-05-23 21:19:27
Labview中,如何實現讓坐標系中某一區域變色?比如,坐標系按照橫坐標每5格,縱坐標每3格是一個方格,該矩形區域根據該范圍的數據量變化顏色,該區域內數據點數多,顏色深,數據點數少顏色淺?
2021-08-06 16:14:16
MATLAB建立和控制圖形窗口和坐標系命令建立和控制圖形窗口 Figure 建立圖形 Gcf 獲取當前圖形的句柄 Clf 清除當前圖形 Close 關閉圖形 建立和控制坐標系
2009-09-22 16:00:57
當前的調速系統帶來了一系列的問題:占據了比較大的有效空間,使系統編程復雜。因此無位置傳感器控制系統的研究變得越發的重要。2.PMSM的坐標系和數學模型永磁同步電機在定子三相(ABC)靜止坐標系下的電壓方...
2021-08-27 06:01:37
Pmsm在旋轉坐標系的數學模型坐標變換dq軸電壓方程整體模型電壓計算模塊dq軸磁鏈計算d,q軸電流轉距計算轉速計算仿真結果因為轉動慣量較小,轉速迅速跟隨同步轉速順利啟動。A相電流與電壓波形...
2021-08-27 07:56:09
標志著OpenHarmony已經可以開發并流暢運行大型的3A游戲。
Cocos****率先推出支持OpenHarmony的游戲引擎
Cocos是本土的游戲引擎公司,擁有Cocos 2dx、Cocos
2023-10-23 16:15:58
圖片標志的坐標值。那么它是經過怎樣的變換得來的呢??下面這幅圖展示了該SDK中3D坐標系。而上表右邊的數據就是講原始坐標系轉化成3D坐標系得出的值。大家可以看到3D坐標系的原點在Image的中心,因此
2018-09-20 11:53:04
WGS84/GCJ02/BD09各坐標系怎么進行轉換?
2021-11-08 08:15:40
WGS84、GCJ02、BD09各坐標系之間的轉換坐標解釋WGS84坐標系:即地球坐標系,國際上通用的坐標系。設備一般包含GPS芯片或者北斗芯片獲取的經緯度為WGS84地理坐標系,谷歌地圖采用
2021-07-30 06:39:32
1、abc坐標系向永磁同步電機通入如下三相電流x = -pi:0.01:pi;u = sin(x);v = sin(x - 2pi/3);w = sin(x + 2pi/3);根據永磁同步電機轉矩
2021-08-27 07:51:46
請教各位大神如何在Labview中建立CCD相機的二維坐標系。謝謝!
2016-10-08 11:40:19
`兩個坐標系在同一平面 ,且知道兩個點A和B分別在兩個坐標系的坐標數據,想求得這兩個坐標系的轉換關系,請問在labview中如何實現該程序的編程呢?`
2021-03-13 10:54:06
labwindows/cvi中,如何在canvas控件上畫一個扇形的極坐標系,可以顯示其上一點的極坐標?
2018-08-10 11:02:28
新的坐標系,然后根據此坐標系使用測量工具測量,達到跟蹤測量的功能。1.首先進行圖像預處理后使用模板匹配工具2.根據模板匹配建立新的坐標系3.使用此坐標系進行邊的測量(此處出現問題)但是在過程中發現一個很奇怪
2014-10-14 19:23:55
平臺的調試與發布流程。內容簡介CocosCreator作為Cocos2d-x官方推出的多平臺開發工具,已經在眾多Cocos圖形編程工具中脫穎而出,而其直接發布成Html5版本的工作流程與方式必將
2020-07-05 14:54:27
Cocos2d-x引擎;5. 使用Cocos2d-x開發手機游戲。崗位要求:1. 精通C/C++編程語言,具有2年以上C++編程經驗;2. 本科及以上學歷,計算機相關專業;3. 具備兩款以上已上架的ios
2017-07-12 10:45:26
三相坐標系對應的電流是 Ia = sin(x)Ib = sin(x-120)Ic = sin(x+120)Clark變換得出Iα = Ia Iβ = (Ia + 2Ib)/根號3Park變化 Id
2017-02-27 15:28:51
產權的行業主流3D引擎,近十年服務了全球160萬開發者。本次,Cocos帶來了全新適配API 9的3D引擎的Cocos Creator,開發者可快速構建并發布鴻蒙生態的3D和2D應用,搶占藍海生態紅利。以下
2023-04-14 09:25:14
自主知識產權的行業主流3D引擎,近十年服務了全球160萬開發者。
本次,Cocos帶來了全新適配API 9的3D引擎的Cocos Creator,開發者可快速構建并發布鴻蒙生態的3D和2D應用,搶占藍海生
2023-04-14 11:37:18
前言2021年,Cocos 正式成立專項項目組,協同華為團隊對 OpenHarmony 2D 及 3D 內容的開發流程與效率進行深度優化。目前已在 Cocos Creator 3.6.1 的基礎上
2022-10-19 14:17:26
1.同步旋轉坐標系下的數學模型1.1 dq坐標系下的定子電壓方程1.2 dq坐標系下的定子磁鏈方程1.3 定子電壓方程變換式及等效電路由上述兩個方程,可以得到定子電壓方程的新等式:電壓等效電路如下
2021-09-03 07:20:48
選擇圓柱坐標系后,圓柱坐標系中的ρ、ψ、Z與直角坐標系中的X、Y、Z是如何對應的?
2017-03-02 21:38:18
進行仿真分析。 本文首先對永磁同步發電機繞組故障理論進行了研究,重點對永磁同步發電機的匝間短路故障進行討論與分析。然后介紹了基于dq坐標系下的永磁同步電動機的數學模型。通過不同坐標系下的數學變換,可以
2021-08-27 06:15:52
0引言鎖相環廣泛應用于如電能質量分析、電力系統保護、并網變換器以及無功補償等現代工業控制領域。已有研究人員對單dq坐標系三相鎖相環算法進行了分析,通過對電壓矢量的坐標變換及PI控制,實現理想電壓工況
2021-09-06 09:24:01
如何使labview中xy圖的坐標系與柵格坐標系一致
2015-01-25 21:44:26
問題如下:我在閱讀發燒友的四軸代碼時,發現四軸是用的北東地坐標系,我現在有兩個疑問:1)使用東北天坐標系和北東地坐標系,重力向量都是[0 0 1]嗎?還是分別是+/-1? 2)當使用北東地坐標系時,我看到四軸代碼將傳感器z軸方向反了一下,這是因為傳感器的正方向與北東地坐標系不一致所導致的嗎?
2019-07-16 04:35:48
如何將一個3D散點圖與3D網格圖在一個三維坐標系中顯示呢?
2017-03-08 18:18:23
各位大神們如何在labview中建立坐標系啊(對一張圖片),感謝各位大神的回復
2017-05-03 10:04:29
如果我的坐標系跟原坐標系不一致,(例如我現在的X軸是原來Y軸的反方向,現在的Y軸是原來的X軸,Z軸不變)更改姿態程序的什么地方,我用的是戰艦板的MPU6050軟件
2019-07-22 03:05:16
當mpu6050初始放置的時候是傾斜的,如何計算才能把坐標系轉換成水平的坐標系?轉換后的效果是保證傾角不變,水平轉動mpu,出來的數據是水平轉動的。我用當前四元數與初始的四元數做差,得到的四元數坐標系還是與mpu坐標系相同,不知道怎么計算才能把坐標系轉換成水平的?
2019-07-31 22:19:38
二、永磁同步電機基礎永磁同步電機定子結構和電勵磁的三相同步電機相似,而轉子為永磁材料進行勵磁,所以通常用d-q軸坐標系下的模型對永磁同步電機進行建模,這樣既可以對電機的穩態性能進行分析,也可以分析
2021-08-27 07:09:58
我發現了一些關于相機坐標系(點坐標)的不同描述下面的圖片是我在這個頁面中認為是相機坐標的點坐標的解釋RealSense SDK 2.0中的投影·IntelRealSense
2018-10-19 14:15:53
機器人的電機傳動控制坐標系是怎樣確定的,是基于什么控制原理,學習機器人的控制理論有哪些比較經典的書籍,求大神指導?
2013-06-10 17:03:57
永磁同步電機dq坐標系中轉矩公式中系數3/2的由來
2021-08-27 06:51:20
永磁同步電機的數學模型的建立有哪幾種坐標系?為什么坐標系轉換可以解耦?
2021-10-11 08:45:04
想要學習labview視覺定位,怎么建立坐標系,通過坐標系來定位抓取和放置功能
2019-04-11 13:22:58
求老師指導,二維坐標系中,已知弧的起點,終點,半徑, 計算出弧的圓心,起始角,弧度,外切矩形坐標,畫出弧,,可能是順弧逆弧同在一直線等等多種情況,,都要判斷,,求老師指導,,*附件:已知起點終點半徑畫弧.rar
2023-11-04 10:27:36
本帖最后由 一只耳朵怪 于 2018-6-11 17:02 編輯
請問電機控制系統中直角坐標系與極坐標系的優勢比較。TI是否有現成的demo例程。
2018-06-11 02:58:19
本文將解決電壓方程在靜止坐標系與運動坐標系轉換問題。本文將呈現的轉換關系是電壓方程由靜止坐標系轉換至運動坐標系,反之同理可證。
2021-08-27 07:17:03
怎么區分不同坐標系下SVPWM調制波波形
2018-12-01 22:03:40
圖片是匿名四軸查看的姿態,假設不帶箭頭的是世界坐標系,四軸為該物體,帶箭頭的是該物體的三個向量,有物體姿態的歐拉角和四元數,怎么求這三個向量在世界坐標系xyz軸上的分量,完全不知道怎么算啊。。。。。。。是不是我想的有問題根本不能算??
2019-05-15 00:07:19
IMU數據融合中,根據加速度計得到的Roll和Pitch及磁力計的三軸分量轉換為東北天坐標系的公式我一直不明白是怎么來的,希望各位大佬能給我解釋下,找了好久都沒找到,最好附上相應公式和相關資料。
2019-06-20 02:21:07
如題,陀螺儀測得的角頻率是導航參考坐標系的還是儀器自身載體坐標系的?
2019-05-31 01:24:09
誰知道這兩個坐標系之間該怎么變換啊,顯示平坐標系是通過攝像頭捕捉畫面,再在顯示屏上顯示的。如果要坐標變換的話,這兩個坐標系該怎么變啊。
2016-05-30 18:43:21
任何跟蹤濾波器的最基本特征是坐標系和參考點或該坐標系原點。坐標系和原點的選擇依賴于幾個因素。這些因素包括由系統跟蹤的目標類型、綜合到系統中的傳感器的類型、來自
2009-07-13 12:11:58 20
20 為了解決實測轉子振動時所產生的失真問題, 分析了非正交坐標系中轉子振動的變化, 建立了非正交坐標系與正交坐標系的變換關系, 并進行了實驗驗證。結果表明, 無須強求兩個
2009-07-16 10:35:5713 什么是坐標系 &nb
2009-12-31 14:16:114209 坐標系與魚雷運動參數
一、常采用的幾種坐標系
在魚雷航行動力學的研究過程中,根據不同的研究目的,須要采用不同的坐標系。常采用
2010-01-06 16:47:464015 
最近,我們與ChukongTechnologie合作,開發Cocos2d-x游戲引擎。我們將對此更新一系列相關文章,本文是第一篇。本文中,我將簡單概述基于圖形演示即Fantasy Warrior
2017-02-10 10:21:11326 
坐標系包含:
1、基坐標系(Base Coordinate System)
2、大地坐標系(World Coordinate System)
3、工具坐標系(Tool Coordinate System)
4、工件坐標系(Work Object Coordinate System)
2018-04-02 11:31:001758 
針對借助激光跟蹤儀標定機器人所涉及的坐標系統一問題,對基于空間幾何法擬合建立的基坐標系與機器人理論基坐標系的轉換關系進行了研究,提出了一種基于對偶四元數法的機器人基坐標系標定方法。利用指數積公式推導
2018-03-07 10:43:522 世界坐標系:在OpenGL中,世界坐標系是以屏幕中心為原點(0, 0, 0),且是始終不變的。你面對屏幕,你的右邊是x正軸,上面是y正軸,屏幕指向你的為z正軸。長度單位這樣來定:窗口范圍按此單位恰好是(-1,-1)到(1,1),即屏幕左下角坐標為(-1,-1),右上角坐標為(1,1)。
2018-05-04 09:00:0011809 
在我們工業機器人定義中,有四類坐標系,他們分別是軸坐標系、世界坐標系、工具坐標系、基座坐標系。
2018-10-05 17:43:0025783 任何機器人都離不開基坐標系,也是機器人TCP在三維空間運動空間所必須的基本坐標系(面對機器人前后:X軸 ,左右:Y軸, 上下:Z軸)。
2019-05-14 09:56:5921431 
大地坐標系:大地坐標系是以大地作為參考的直角坐標系。在多個機器人聯動的和帶有外軸的機器人會用到,90%的大地坐標系與基坐標系是重合的。但是在以下兩種情況大地坐標系與基坐標系不重合:
2020-05-09 15:49:434003 開發者,突發奇想,能否雙劍合璧,用遠程真機設備來開發鴻蒙游戲呢? 總個過程比預想的順暢多了,沒有遇到太多坑,推薦游戲開發者去體驗一下鴻蒙的開發過程。 利用真機調試+Cocos Creator 開發鴻蒙
2021-06-30 08:56:581663 
”,同臺論道,攜手以科技之力,探索如何賦能開發者揚帆出海之路。 作為 Web 端游戲推薦開發工具 ?Cocos 打造高保
2022-09-16 10:17:19643 
世界坐標系,相機坐標系,圖像物理坐標系,像素坐標系之間的關系。
2023-03-08 16:44:002118 一般都會定義機器人第一軸的旋轉軸為基坐標系Z軸,旋轉中心即是坐標系原點,X和Y的方向是的電機零點確定,所以只要你不更換電機的零點和機械結構,單個機器人里這個基坐標系是永遠不會變的!
2023-05-11 15:57:441025 
ENU局部坐標系采用三維直角坐標系來描述地球表面,實際應用較為困難,因此一般使用簡化后的二維投影坐標系來描
述。
UTM:在眾多二維投影坐標系中,統一橫軸墨卡托(The Universal
2023-06-01 15:59:510 介紹自動駕駛技術中幾種常用的坐標系統,以及他們之間如何完成關聯和轉換,最終構建出統一的環境模型。
所謂時空坐標系,包括三維空間坐標系和一維時間坐標系。在此基礎上,用解析的形式(坐標)把物體
2023-06-02 15:44:500 我們在檢測工件時,需要正確的裝夾檢測工件,使工件有足夠的檢驗空間和恒溫時間,坐標系的建立就是為后續的測量奠定基礎,建立錯誤的坐標系直接導致測量尺寸的誤差建立正確的參考方向即坐標系是十分重要的。
2023-02-17 10:24:174137 
相機的成像過程涉及到四個坐標系:世界坐標系、相機坐標系、圖像坐標系、像素坐標系。這篇博客介紹相機的成像過程,以及四個坐標系之間的裝換關系。
2023-07-03 10:30:114075 
在編程操作過程中,為了確定機器人的空間位置以及姿態的變化,需要建立合適的工具和用戶坐標系。工具坐標系用于確定每個工具中心點(TCP)的位置和工具姿勢。
2023-11-07 11:44:28230 
其中r是毫米像素比、(mm/pixel)就是一個毫米有幾個像素,theta為兩個坐標系之間的夾角,(x0,y0)為圖像坐標原點到機械坐標原點的距離。
2023-11-12 09:42:18580 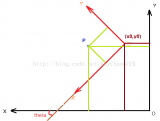
大地坐標系:大地坐標系是以大地作為參考的直角坐標系。在多個機器人聯動的和帶有外軸的機器人會用到,90%的大地坐標系與基坐標系是重合的。但是在以下兩種情況大地坐標系與基坐標系不重合。
2023-11-13 11:24:46675 
坐標系是我們非常熟悉的一個概念,也是機器人學中的重要基礎,在一個完整的機器人系統中,會存在很多坐標系,這些坐標系之間的位置關系該如何管理? ROS給我們提供了一個坐標系的管理神器——TF。 機器人
2023-11-22 17:20:23462 
今天我們要講的是應用于衛星通信領域的一個坐標轉換過程——機體坐標系與ENU坐標系的轉換。
2023-12-27 09:30:23529 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論