 電子發燒友App
電子發燒友App


引言
在嵌入式系統電子設備的運行中,當出現程序跑飛的情況或程序跳轉時,可用手動或自動的方法發信號給硬件特定接口,使軟件的運行恢復到特定的程序段運行,這一操作就是復位(Reset);這一過程中,手動或自動發給硬件特定接口的信號,就是復位信號。為了克服系統由于內因(時鐘振蕩源的穩定性)和外因(射頻干擾)所引起的運行不穩定的情況,在嵌入式系統軟件和硬件上,必須作相應的處理和保護。復位操作是一種行之有效的保護措施,同時復位系統本身也是引起嵌入式系統運行不穩定的因素,在設計時需特別注意。
本文結合筆者親身經歷的實例來說明Reset的重要性,巧妙地運用Reset使系統工作更穩定可靠。
1 Reset方式及手段
在嵌入式應用系統中,復位操作包括兩個方面——處理器本身的復位和系統中外設(外接功能模塊)的復位,如圖1所示。
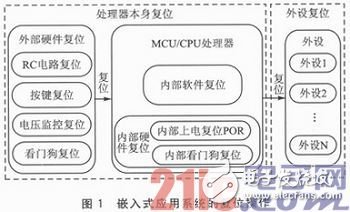
總的說來,嵌入式復位方式主要分硬件復位和軟件復位。硬件復位,即采用硬件的手段、通過硬件復位信號對系統處理器或者外設進行復位。只要在RST端出現一定時間(具體看系統和處理器的機器周期)的復位電平信號,由CPU采樣復位信號,啟動復位時序,即可完成復位操作。硬件復位一般包括上電復位、按鍵復位、電壓監控復位和看門狗復位等,這些復位信號,在系統設計時可用邏輯電路組合起來加載到系統的RST端。軟件復位,即通過軟件手段,在軟件框架里對系統復位,重新初始化系統。
按處理器內外來劃分,又分為芯片內復位和芯片外復位。于是,硬件復位又分外部硬件復位和內部硬件復位。
對于硬件復位,按復位信號電平高低又可分為高電平復位和低電平復位。高電平復位是高電平有效,并在復位脈沖的下降沿完成復位過程;低電平復位是低電平有效,并在復位脈沖的上升沿完成復位。具體用什么復位信號,視嵌入式系統本身而定,但大多采用低電平復位,這與TTL的功耗有關,因為TTL電路中高電平的吸收電流要遠小于低電平的吸收電流。
2 上電復位的實現及穩定性設計
2.1 上電復位
上電復位(Power On Reset,POR),即系統上電時通過復位電路,在RST引腳提供一個足夠長時間的復位電平信號,直至系統電源穩定后,再撤銷復位電平。在嵌入式系統中,上電復位是系統啟動初始化復位,全面而系統地復位處理器內的所有邏輯單元與模塊,將初始化內部邏輯操作,如存儲器控制器、中斷控制器和I/O引腳等的配置。
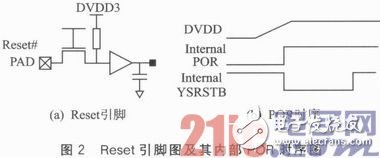
上電復位是保證嵌入式系統正常運行的基本操作。通常處理器芯片內部自帶上電復位電路,圖2(a)所示為某MCU(微控制器)Reset引腳示意圖,內部自帶上電復位電路。MCU芯片上電時,片內POR將產生內部復位信號以初始化芯片內的數字模塊,其時序如圖2(b)所示。
有的處理器芯片通過在片外添加RC延時電路來得到上電復位信號。RC復位電路的復位脈沖寬度由芯片要求的復位時間決定,持續時間取決于RC電路參數,電容太大復位時間很長,電容太小復位時間不夠,不足以穩定復位。
2.2 上電復位失效及應對措施
實際工作時,由于各方面的原因,上電復位會失效。由于受到干擾、電源波動、誤操作等原因,短暫的電壓下降造成供電恢復時由于電壓沒有滿足POR的發生條件,復位端的低電平復位信號無法再次啟動系統重新復位工作,此時會出現系統死機;電源二次開關時間間隔太短時,復位不可靠;當電源電壓中有浪涌現象時,可能在浪涌消失后不能產生復位脈沖。這些現象盡管并不頻繁,但對于某些特殊應用場景,如不能隨時進行手動復位的遠程自動控制系統,卻是致命的。
出現失效時,常采用提高復位門限來應對,使復位門限位于處理器正常工作電壓范圍內,且接近處理器正常工作時的最低門限。另一應對措施是延長復位信號時間,讓復位信號在電壓值恢復后維持足夠長的時間。電源穩定后還要經過一定的延時才撤銷復位信號,以防止電源開關或電源捕頭分一合過程中引起的抖動影響復位。另外,為了解決電源毛刺和電源緩慢下降(電池電壓不足)等問題引起的POR不可靠現象,有設計人員在RC電路中增加了二極管放電回路,在電源電壓瞬間下降時使電容迅速放電,這樣,一定寬度的電源毛刺也可令系統可靠復位。
2.3 實例分析:快速開關機單片機啟動不穩定
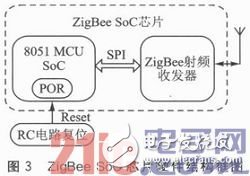
筆者曾經做過一個ZigBee物聯網項目,采用ZigBeeSoC芯片,硬件結構如圖3所示,主要包括一個8051的MCU核和ZigBee收發器。調試時,發現ZigBee模塊快速關機然后快速開機,即二次開機時不穩定,有時啟動不正常,功能不能實現。在軟件里加Trace信息,發現當快速開關機時MCU并沒有正常啟動,沒有進入所需要的初始化和主循環。避免快速關機開機,則可以正常啟動。當嵌入式系統關機后立即再開機,有時不能正常工作,是因為復位不充分,這是嵌入式系統的共同點。
最后發現,由于SoC芯片里有內部POR,所以片外沒有加RC復位電路。而工作電源VDD_3V上有20μF電容,下電時不能快速放電。添加外部RC復位電路(100 kΩ電阻和1μF電容),延長復位時間,電源穩定后再取消復位。Reset功能在芯片上下電時更穩定,問題得以解決。有時候電阻電容這種“小器件”往往可以解決“大問題”。
3 電壓檢測復位
為了防止系統在上電、突然掉電或者電網瞬間欠壓引起嵌入式系統操作失誤,更常用和有效的方法是采用具有復位信號輸出的電壓監測電路。電壓監測電路提供多種保護功能:在系統上電、瞬間欠壓時提供系統復位信號;系統突然斷電、瞬間欠壓時輸出監測信號,以供系統實施保護措施,如數據保護、I/O安全設置;可連接備用電源,保證備用電源的投、切控制。
對于供電系統的容差范圍較大、壓值精度較低的情況,或者是遇到電網長期工作在欠壓狀態下時,可能會造成系統在正常工作條件下頻繁復位。這種情況更應該監控電源電壓,當監測到電壓波動時,監控芯片向處理器發送電壓異常信號,處理器響應該信號并中斷正在運行的程序,進入掉電保護子程序,設置復位狀態寄存器,避免下次上電時由于寄存器狀態錯誤而無法啟動上電復位。
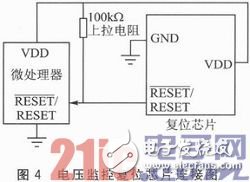
電壓監測復位,可以解決電源毛刺等造成系統不穩定。復位電路可以采用分立元件搭建,目前常用專用集成電路芯片,閾值電壓和復位信號有些可通過編程修改。圖4是一個典型的電壓監控復位芯片與微處理器的連接圖。
4 看門狗復位
看門狗復位(即程序運行監視復位)可保證程序非正常運行時能及時進入復位狀態。看門狗分硬件看門狗和軟件看門狗。
4.1 硬件看門狗復位
硬件看門狗的基本原理是,為電路提供一個用于監視系統運行的信號線,當系統正常運行時,應在規定的時間內給信號線提供一個特定信號;如在規定的時間內無這個信號,自動復位電路就認為系統運行不正常,并重新對系統進行復位。具體方式是通過處理器的定時復位計數器來實現。此復位電路的可靠性還與軟件有關,即將向復位電路發出脈沖的程序放在何處,在哪里插入“喂狗”指令,需作優化。
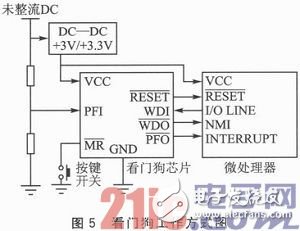
硬件看門狗復位主要有三種形式:使用內部帶WDT功能單元的電路,外部增設WDT電路和專用集成WDT芯片。圖5是一個看門狗芯片的工作方式圖。
4.2 軟件復位
軟件復位可以節約電路板的空間和成本;軟件復位方式更靈活,更便捷。尤其是對一些功能模塊或者外設的監控,借鑒硬件看門狗思想,采用軟件看門狗更有優越性。用軟件來監測功能模塊或者外設的工作情況,一旦認為功能模塊或者外設工作異常,通過設定特殊的標記,達到Reset判據時,則通過處理器強行復位并重新初始化工作異常的功能模塊或者外設,而其他功能模塊或者外設照常工作。當然,有時也需要重新復位并初始化整個系統,使系統更穩定地運行。有些系統人為操作硬件復位(按鍵復位或者上下電)很不方便時,或者有些系統和產品不便于讓用戶知道其重啟時,就可采用軟件復位。
4.3 實例分析:手機找網問題
筆者做過一個功能手機(feature phone)項目,由于手機平臺剛推出,平臺不太穩定,軟件存在一些Bug,尤其是底層Layer1部分。手機找不到網,或者手機有網但過一段時間又沒有網的現象,發生概率很小,很難Debug。當時軟件找了很長時間的Bug,并把問題反饋給平臺廠商,但沒能及時給出解決方法。情急之下,只好做了應急之便,采用軟件復位的方法來救急。
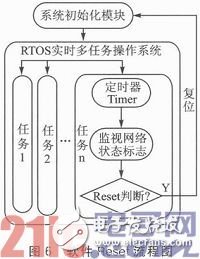
在RTOS實時多任務操作系統軟件中,添加一任務,設置網絡狀態標志位來監視網絡狀態,當手機沒有信號時設置某標志;通過適當的判據,確認是否Reset,如果達到Reset條件就迅速地軟件復位,軟件重新初始化,如圖6所示。復位過程只能是“偷偷地”快速進行,不能讓用戶察覺,否則用戶體驗極為不好;要保持用戶界面,底層快速重啟,不知不覺地完成重啟。重啟后,網絡正常,用戶使用正常,巧妙地緩解,當然最終還是從本質上去解決問題。
5 外設的復位及穩定性設計
5.1 外設復位的特殊性與可控性
嵌入式系統通常有LCD顯示、攝像頭和無線通信模塊等外設。外設正常工作也需要正確的復位。有些設計直接將外設的復位引腳與處理器的復位引腳連在一起,共用一個外部硬件復位源,如圖7(a)所示。這種連接方式存在一些問題。首先,這要求復位電路有足夠的復位時間,才能保證處理器和外設都正確復位;其次,一旦外設出問題,那么處理器也需要復位,整個系統都需重新初始化;最后,容易產生異步復位,在處理器復位后,對外設寫入命令時,可能被外設所復位掉,導致初始化出錯。
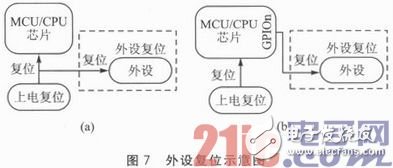
這些問題可以從硬件和軟件兩個方面來處理。硬件方面,對處理器和外設的復位分別進行復位電路設計,適當展寬復位脈沖。軟件方面,采用延時法,CPU上電后延時一段時間,等待外設復位充分,再進行外設初始化。最可靠并最具操作性的是保證外設復位的可控性,使外設的復位信號與處理器復位信號分開,由處理器的某一GPIO來控制。當處理器穩定上電完成自身的初始化后,由處理器軟件控制外設復位,適當延時后,再對外設進行初始化,如圖7(b)所示。
外設復位的可控性,對要求特殊復位時序的外設尤其有用。不同的外設,其復位時序要求不同,具有個性與特殊性,系統應根據具體的復位時序要求進行個性化復位,否則可能導致外設工作不正常。
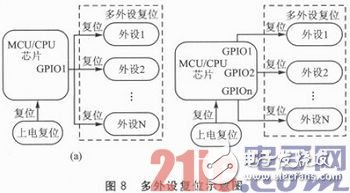
對于應用系統中有多個外設時,不應該如圖8(a)那樣把多個外設的復位引腳連在一起,由處理器的一個GPIO控制,進行一次外部硬件復位。通常采用如圖8(b)的連接方式,處理器完成上電復位后,分別通過不同的GPIO控制、采用不同的延時對各外設分別進行上電及復位。系統運行過程中,某個外設因受干擾工作不正常時,可以單獨對該外設進行復位操作,而不影響其他外設;有利于提高系統設計的靈活性和可靠性,能保證多個外設的可靠運行。
5.2 實例分析:WiFi模塊的特殊復位信號
筆者做過一個用WiFi進行數據傳輸的項目,整個系統如圖9所示,SoC處理器模塊采集到的數據通過UART傳送給WiFi模塊,WiFi模塊再通過2.4 GHz無線信號傳送給無線WiFi AP,最后經以太網口傳送給PC,由PC把無線AP獲取的數據保存到硬盤。

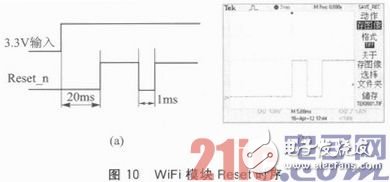
調試時,發現前端部分工作不穩定,WiFi模塊啟動不穩定,各次啟動現象不一致,有時能正常啟動,有時不能正常啟動。最后,找到問題的所在點:WiFi模塊上電啟動時,沒有得到正確的復位。系統上電的RC復位電路產生的Reset信號并不能完全使系統穩定,需要再加一個脈沖信號,如圖10(a)所示。WiFi模塊的Reset時序包括兩個階段:大于20 ms的上電Reset和大于1 ms的硬件脈沖信號。微處理器SoC上電復位并初始化后,由I/O控制WiFi模塊上電及復位,按需求進行了特殊復位處理,采用特殊的Reset信號和時序,如圖10(b)所示,模塊可以穩定啟動,工作正常,問題解決。
結語
嵌入式系統的復位方式有上電復位、按鍵復位、電壓監控復位和看門狗復位等很多種,正確地設計復位電路,合理并巧妙地應用各種類型的復位操作,能使整個嵌入式系統更可靠、更穩定地工作。










 工商網監
工商網監
評論