 電子發(fā)燒友App
電子發(fā)燒友App


ARM ADS全稱為ARM Developer suite(ARM開發(fā)套件)。ADS的CodeWarrior集成開發(fā)環(huán)境(IDE)是基于Metrowerks CodeWarrior IDE4.2版本的,經(jīng)過適當(dāng)?shù)牟眉粢灾С諥DS工具鏈,為管理和開發(fā)項(xiàng)目提供了簡單多樣化的圖形用戶界面,用戶可以使用ADS的CodeWarrior IDE為ARM和Thumb處理器開發(fā)用C、C++或ARM匯編語言的程序代碼,縮短了用戶開發(fā)項(xiàng)目代碼的周期。ADS中包括3個(gè)調(diào)試器:AXD(ARM ExtendedDebugger)、ARMSD(ARM Symbo l i c Debugger)、ADW/ADU(Appl icat ion Debugger Windows/Unix)。在軟件開發(fā)的最初階段,可以使用調(diào)試器進(jìn)行仿真來測試所開發(fā)的軟件是否達(dá)到了預(yù)期的效果。
在數(shù)據(jù)采集的實(shí)際開發(fā)應(yīng)用中,串口通信是不可缺少的部分,它是目前嵌入式系統(tǒng)與PC機(jī)間的一種非常重要且普遍使用的通信方式。計(jì)算機(jī)利用串口對單片機(jī)等外部設(shè)備的控制減少了在訪問外部設(shè)備時(shí)需要進(jìn)行復(fù)雜的匯編語言編程等帶來的麻煩,同時(shí)也有利于大規(guī)模的開發(fā)和設(shè)計(jì)。在Linux系統(tǒng)中,系統(tǒng)把串口等其它外設(shè)當(dāng)作文件進(jìn)行操作,在端口的讀寫上非常方便,大大提高了系統(tǒng)編程效率。本文通過把Linux系統(tǒng)移植到S3C2410后,利用S3C2410自帶的串口對目標(biāo)實(shí)現(xiàn)控制,詳細(xì)地介紹了串行通信的硬件電路和軟件的實(shí)現(xiàn)方法。
S3C2410硬件平臺簡介
S3C2410是韓國三星公司生產(chǎn)的新一代高性能微處理器,它是基于ARM920T內(nèi)核的16/32位RISC處理器。主要應(yīng)用于嵌入式系統(tǒng)中。
S3C2410擁有強(qiáng)大的數(shù)據(jù)處理能力。又有著低成本。低功耗等優(yōu)點(diǎn)。在各種手持及移動(dòng)設(shè)備上的應(yīng)用越來越廣泛,基于其平臺的程序功能也越來越復(fù)雜。于是,在其平臺上架構(gòu)多線程的操作系統(tǒng)已成為越來越多系統(tǒng)設(shè)計(jì)者的訴求,本文介紹多線程在S3C2410上的具體實(shí)現(xiàn)過程。
硬件結(jié)構(gòu)
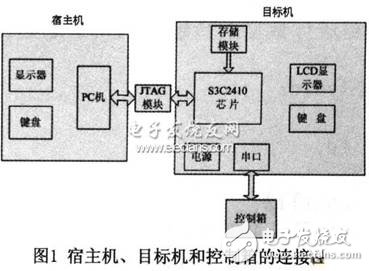
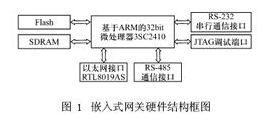
目前串口大部分是在Windows或是在Dos下運(yùn)用,本文是在Linux系統(tǒng)下利用串口來實(shí)現(xiàn)通信的。S3C2410芯片是三星公司生產(chǎn)的 16/32bit的RISC處理器,獨(dú)立的16kB指令和16 kB數(shù)據(jù)的緩存(cache),用于虛擬內(nèi)存管理的MMU單元,LCD控制器(STN&TFT),非線性(NAND)FLASH的引導(dǎo)單元,系統(tǒng)管理器(包括片選邏輯控制和SDRAM控制器),3個(gè)通道的異步串口(UART),每個(gè)控制器支持的最高波特率可以達(dá)到230400 Boud/s,這些特點(diǎn)為實(shí)現(xiàn)在Linux系統(tǒng)下計(jì)算機(jī)與開發(fā)板之間順利進(jìn)行串口通信提供了可靠的保證。WNSC400是北京維納光科公司生產(chǎn)的電動(dòng)位移平臺控制箱,它擁有RS232的串口能使S3C2410通過串口對其進(jìn)行數(shù)據(jù)通信,從而能夠?qū)崿F(xiàn)S3C2410對電動(dòng)位移平臺的控制。但是控制箱是在 Windows環(huán)境下實(shí)現(xiàn)的,所以要想把它應(yīng)用到嵌入式系統(tǒng)中是存在難度的。S3C2410的串口要實(shí)現(xiàn)與控制箱的數(shù)據(jù)傳輸,那么就要使控制箱及其控制的電動(dòng)平移臺實(shí)現(xiàn)與其它模塊組成嵌入式系統(tǒng),比如與一臺攝像頭聯(lián)系起來,當(dāng)攝像頭對物體進(jìn)行圖像采集后,對采集數(shù)據(jù)進(jìn)行處理,進(jìn)而計(jì)算出目標(biāo)具體要改變的位移等參量,然后控制箱在通過$3C24lO的存儲器中讀取這些數(shù)據(jù),并發(fā)出命令使電動(dòng)位移平臺按需要的改變量進(jìn)行移動(dòng),這樣就是實(shí)現(xiàn)了一個(gè)簡單的嵌入式系統(tǒng)。計(jì)算機(jī)(宿主機(jī))、目標(biāo)機(jī)(S3C2410)還有控制箱之間連接的硬件原理如圖1所示。在宿主機(jī)上將在ADS環(huán)境下編好的程序通過JTAG下載到 S3C2410后,S3C2410就可以通過串口與控制箱進(jìn)行通信。
UART軟件
通用異步收發(fā)器(UART)是一種串行接口,許多微處理器和微控制器中都包含這種外設(shè)接口。異步串行接口提供了一種簡單的途徑,使兩個(gè)器件無需共享同一個(gè)時(shí)鐘信號就能進(jìn)行通信。如果再加入一個(gè)合適的電平轉(zhuǎn)換器,串口還能用在RS-232和RS-485網(wǎng)絡(luò)中通信,或者與計(jì)算機(jī)的COM端口連接。串口只需兩根信號線(Rx和Tx)即可實(shí)現(xiàn),而且只要兩端器件都采用同樣的位格式和波特率,那么它們無需其它任何對方的信息就可以成功傳輸數(shù)據(jù)。軟件UART的意義
如今,可提供功能完善的硬件串口的微控制器比比皆是,那么我們?yōu)槭裁催€要費(fèi)力地用微控制器的端口管腳來實(shí)現(xiàn)軟件UART呢?主要有以下幾個(gè)原因:
首先,盡管確實(shí)有許多微控制器都包含了硬件UART,但仍有許多沒有包含這種接口。在系統(tǒng)設(shè)計(jì)中,選擇微控制器時(shí),可能很難找到一款各方面都很理想的產(chǎn)品。例如,電壓范圍合適的微控制器可能內(nèi)部存儲器不夠大,而存儲器大小足夠的可能又沒有足夠的端口管腳,無法滿足設(shè)計(jì)需求。因此,通過軟件方式實(shí)現(xiàn)某些系統(tǒng)需要的外設(shè)接口,從而彌補(bǔ)一款微控制器性能上的缺陷,就能增加可供設(shè)計(jì)選擇的微控制器的數(shù)量和種類,從而增大設(shè)計(jì)的靈活性。
第二,即便一款微控制器包含了一個(gè)功能完善的硬件UART,由于某種原因,這對即將進(jìn)行的設(shè)計(jì)來說可能仍然不夠。例如,可能是微控制器需要與之通信的外設(shè)所用的協(xié)議與串口協(xié)議稍有不同,也可能是硬件UART所提供的位數(shù)、奇偶校驗(yàn)功能或輸入和輸出緩存無法完全滿足應(yīng)用的要求。這時(shí),通過構(gòu)建一個(gè)軟件UART接口,我們在定義UART的功能和串口協(xié)議的細(xì)節(jié)上就更靈活。
第三,一款微控制器的硬件UART也許能夠很好地滿足應(yīng)用的需求,但只是數(shù)量不夠。例如,微控制器包含兩個(gè)UART,而設(shè)計(jì)中的應(yīng)用卻需要三個(gè)。此時(shí),我們不必僅僅為了增加串口的數(shù)量就另外增加一塊新的芯片,而只需增加一個(gè)與該微控制器上現(xiàn)有的UART具備同樣功能和特性的軟件UART。
UART軟件部分的實(shí)現(xiàn)
絕大多數(shù)的Linux軟件開發(fā)都是以native方式進(jìn)行的,即本機(jī)(HOST)開發(fā)、調(diào)試、本機(jī)運(yùn)行的方式,但是由于在目標(biāo)機(jī)上沒有足夠的資源來滿足嵌入式系統(tǒng)的開發(fā),所以這種方式不適合于嵌入式系統(tǒng)的軟件開發(fā)。通常嵌入式系統(tǒng)軟件開發(fā)采用交叉編譯調(diào)試的方法。交叉編譯的主要特征是某機(jī)器中執(zhí)行的程序代碼不是由本機(jī)編譯生成,而是由另外一臺機(jī)器編譯生成。
串口通信的基本任務(wù)有:實(shí)現(xiàn)數(shù)據(jù)格式化、進(jìn)行串/并轉(zhuǎn)換、控制數(shù)據(jù)傳輸速率、進(jìn)行錯(cuò)誤檢測和進(jìn)行TTl與EIA電平轉(zhuǎn)換。串口通信分為同步通信和異步通信兩種類型,本文將用到異步串行I/0。
由于Linux系統(tǒng)將所有的設(shè)備都看成文件,所以訪問串口時(shí),認(rèn)為串口是一個(gè)文件,我們可以使用文件系統(tǒng)控制函數(shù)實(shí)現(xiàn)基本的串口操作,比如open()函數(shù)用來打開串口,read()和write()函數(shù)用來讀寫串口,在傳輸數(shù)據(jù)完成后可以用close()函數(shù)關(guān)閉串口。
構(gòu)造了一個(gè)嵌入式版本的Linux文件系統(tǒng),它使得內(nèi)核在系統(tǒng)盡量精簡的情況下能夠運(yùn)行起來,并滿足產(chǎn)品和系統(tǒng)各方面的要求。其中,為文件系統(tǒng)配置用戶和屬組以達(dá)到一定的安全性更是系統(tǒng)的一大特色。另外,在這個(gè)嵌入式文件系統(tǒng)中,引入了VFS的支持,雖然犧牲了一些空間,但是大大方便了今后各種物理文件系統(tǒng)的動(dòng)態(tài)加載。Linux的文件系統(tǒng)事實(shí)上非常的龐大,構(gòu)造一個(gè)嵌入式的Linux文件系統(tǒng)是一個(gè)很復(fù)雜的過程
串口的基本設(shè)置
串口最基本的設(shè)置有波特率設(shè)置、檢驗(yàn)位和停止位的設(shè)置。串口的設(shè)置主要是設(shè)置struct termios結(jié)構(gòu)體的各成員值:

串口的讀寫
發(fā)送數(shù)據(jù)

除了上面用read來讀取串口的方法外,也可以使用操作文件的函數(shù)來實(shí)現(xiàn)異步讀取,如fcnt1,或者selectt等。
應(yīng)用程序
ADS開發(fā)平臺的優(yōu)點(diǎn)是它已經(jīng)把串口的相關(guān)設(shè)置函數(shù)都已經(jīng)包含在相關(guān)的頭文件中,這樣當(dāng)開發(fā)人員想利用串口進(jìn)行再次研發(fā)時(shí)就可以直接利用這些函數(shù),或者在原函數(shù)上進(jìn)行修改。本文中要通過S3C2410的串口對WNSC400控制箱進(jìn)行數(shù)據(jù)的傳輸就利用了這些優(yōu)點(diǎn),部分程序如下:

結(jié)語
在ADS環(huán)境下進(jìn)行的開發(fā)減少了直接在Linux系統(tǒng)下進(jìn)行串口開發(fā)所遇到的麻煩,而且由于AARM具有多功能模塊擴(kuò)展功能,可以使多種功能集中起來,為WNSC400控制箱及其電動(dòng)平移臺廣泛應(yīng)用于嵌入式系統(tǒng)中創(chuàng)造了條件。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論