 電子發燒友App
電子發燒友App


USB作為一種串行通信總線,采用主從式通信方式,從設備只能被動響應來自主設備的請求,不能主動發起請求。隨著嵌入式系統技術的發展,對交互性操作要求越來越迫切,而采用USB雙向通信可以很好地解決上述問題。本文介紹一種基于S1C33L11芯片利用嵌入式操作系統的同步機制通過對循環隊列及自定義控制包的操作來實現雙向通信的方法。
1嵌入式操作系統中USB雙向通信系統整體層次結構
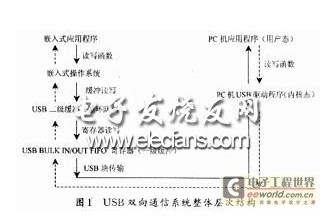
嵌入式操作系統中USB雙向通信系統整體層次結構如圖1所示。

2硬件系統
2.1S1C33L11及其USB BLOCK簡介
S1C33L11是EPSON公司的32位高速,低功耗,低電壓MCU。他是以C33 STD 32位RISC CPU為核心,功能強大,除一般外圍設備外有LCD控制器,Camera接口,JPEG編碼,USB1.1功能控制器,MAC(SPI模式)接口,SmartMedia接口,還包括3個振蕩電路和2個鎖相環(PLL),內置16kB RAM ,無ROM。
S1C33L11內建支持USB1.1協議的全速模式。支持控制、塊、同步和中斷4種傳輸方式,支持 4個通用通道(Epr(r=a,b,c,d))和一個控制通道(endpoint0),并為每個通道(endpoint)提供1 kB的FIFO。
2.2S1C33L11DMT01開發板簡介
S1C33L11DMT01開發板采用S1C33L11F00A1芯片為核心,外接2 MB RAM,32 MB FLASH,還帶有STN TFT 雙屏彩色LCD等,此硬件環境適用于各種嵌入式操作系統的運行及多媒體手機、PDA等產品的開發。?
3USB雙向通信的設計與實現
本文USB雙向通信在基本傳輸方式上采用USB塊傳輸[1]。他由USB初始化、USB中斷處理、控制傳輸和塊傳輸幾部分組成[2]。在實現雙向通信上,具體通信機制是:嵌入式應用程序通過讀寫循環隊列和信號量狀態與USB 硬件模塊中的OUT 和IN FIFO相互通信,而USB下位機與上位機(PC)的讀寫通信則通過上位機對控制包的讀寫來實現,最后通過循環隊列、信號量、控制包3者結合達到USB雙向通信的目的。
3.1USB雙向通信固件程序的設計與實現
(1)循環隊列
采用IN傳輸一個循環隊列,OUT傳輸一個循環隊列(以下簡稱隊列),每隊列動態分配32 kB。OUT隊列做為OUT傳輸時的二級緩沖,即OUT傳輸時的FIFO的數據必須先放入OUT隊列才能由嵌入式操作系統讀寫;IN隊列做為IN傳輸時的二級緩沖,即IN傳輸時的FIFO數據必須來自IN隊列;嵌入式操作系統只對二級緩沖進行讀寫,操作系統對隊列的管理是采用信號量通知機制來實現。
(2)控制包
為實現雙向通信,規定一種控制包格式,讀控制包是在USB協議之外自定義的。
控制包固定為5字節。從左到右第一字節為狀態字,剩下4字節傳送要收發的數據字節數。當控制包由上位機發出時,狀態字規定有3種:0x4F:上位機請求OUT傳輸,0x49:上位機請求IN傳輸,0x52:上位機請求讀取下位機狀態;當上位機收到控制包時,狀態字規定有5種:0 x00:USB空閑態,0x01:下位機OUT循環隊列滿(即OUT超時),0x02:下位機IN循環隊列空(即IN超時),0x04:OUT傳送成功,0x08:IN傳送成功。
(3)嵌入式操作系統端應用程序讀寫USB過程
讀函數:void ReadUSB(unsigned char * ReadBuffer, DWORD size)函數:
功能:嵌入式系統應用程序通過USB接口讀取上位機(PC)的數據。
參數說明:unsigned char*ReadBuffer存放數據的指針,DWORD size為要讀出的數據的尺寸(單位:B)。
實現過程:首先判斷循環隊列是否為空,不為空則判斷自身信號量是否可用,若可用,則從隊列中讀取一字節,每讀一字節后向USB任務中的BulkOutGet函數(直接讀取OUT的FIFO函數)發出一個信號量,通知BulkOutGet函數隊列此時可以向OUT循環隊列中寫入數據,接著重新判斷,依次逐字節從OUT循環隊列中讀取數據,直到讀完要求數據大小為止。當循環隊列為空時,首先發一個信號量,通知BulkOutGet函數應向本隊列中寫入數據了,然后復位自身信號量,接著調用等待信號量的函數,直到信號量到時才接著讀取。若超時,則向嵌入式操作系統發出超時通知,同時通過向控制包中寫入超時狀態(0x01)來向上位機(PC)發出超時信號。
寫函數:void WriteUSB(unsigned char*Write Buffer,DWORD size)函數:
功能:嵌入式系統應用程序通過USB接口向上位機(PC)發送數據。
參數說明:unsigned char * WriteBuffer 存放數據的指針,DWORD size為要寫入的數據的尺寸(單位:B)。
實現過程:首先判斷循環隊列是否滿,不為滿則判斷自身信號量是否可用,若可用,則向隊列中寫入一字節,每寫入一字節后向USB任務中的BulkInDataSet(直接寫IN的FIFO函數)函數發出一個信號量通知此函數此時可以從IN循環隊列中讀取數據;然后接著重新判斷依次逐字節向IN循環隊列寫入數據,直到寫完要求數據大小的數據為止。當循環隊列滿時,先發一個信號量通知BulkInDataSet函數應從隊列中取走數據,再復位自身信號量,接著調用等待信號量的函數,直到信號量到時才接著寫入,若超時,則向嵌入式操作系統發出超時通知,同時通過向控制包中寫入超時狀態(0x02)來向上位機(PC)發出超時信號。
(4) USB塊傳輸函數
USB塊傳輸函數是直接和USB硬件打交道的函數,他們直接讀取IN和OUT傳輸通道的FIFO。voi d BulkInDataSet(void):其功能是IN傳輸過程,即從IN循環隊列中讀取數據并向IN FIFO中寫入數據,再對嵌入式操作系統信號量做相應處理。
void BulkOutDataGet(void)其功能是OUT傳輸過程,即從OUT FIFO中讀出數據并向OUT循環隊列中寫入數據,再對嵌入式操作系統信號量做相應處理。
(5) 嵌入式操作系統USB 任務調用函數
void SystemInit(void):MCU初始化(微處理器各控制寄存器和狀態初始化過程)
void USBInit(void):USB初始化(包括對循環隊列分配內存等)
void USBThread(void):USB運行體(USB工作過程對USB中斷進行處理主要包括USB塊傳輸函 數、USB中斷狀態分析處理等)。
void FreeUSB(void):關閉USB和釋放由malloc函數分配的循環隊列所占內存
3.2上位機(PC)部分
USB函數層(USBD及HCD)由Windows98提供,負責管理USB設備驅動程序與USB控制器之間的通信、加載及卸載USB驅動程序等。具體方法是通過DriverWorks軟件生成上位機(PC)機端USB驅動程序模板[3],根據下位機的情況處理相應的讀寫部分,最后通過封裝基本API函數ReadFile,WriteFile來實現用戶態應用程序與PC機USB驅動程序的隔離,使PC的應用層對USB的使用如同對串口的使用一樣方便,給用戶態應 用程序提供有了3個接口函數:
unsigned char Read(void *pReadBuffer,DWORD Size):從下位機中讀取數據
參數說明:void *pBuffer:存放讀取數據的緩沖,DWORD Size:需讀取數據的大小(字節數)
返回值:
0x10:驅動出錯(指Windows USB 驅動程序出錯)
0x20:內存空間不足?
0x30:請求的數據大小為0 B
0x02:下位機發送軟超時
0x08:讀取成功
unsigned char Write(void *pWriteBuffer,DWORD Size):發送數據到下位機
參數說明:void *pBuffer; 存放寫入數據的緩沖,DWORD Size; 需寫入數據的大小(字節數)。
返回值:
0x10:USB驅動出錯(Windows USB 驅動程序出錯)
0x20:內存空間不足
0x30:請求的數據大小為0 B
0x01:下位機讀取數據軟超時
0x04:發送成功
void RequestUSB(void *pRequestBuffer,DWORD Size=5):讀取下位機返回的操作狀態。
參數說明:void *pRequestBuffer:5 B控制包緩沖
其中每次Read或Write函數的調用被分為若干次讀/寫發送。具體處理是: 設待讀寫的數據字節數為X B,當X=5B時,分割為X1=4 B和X2=1 B兩次發送(由于自定義包是5 B,為了與自定義控制包區分開);當5 B16 kB時則分割以16kB為單位的數據進行發送,不足16 kB的部分再發送一次。每次讀/寫發送分3個階段:發控制包,讀/寫數據,讀控制包狀態。
4結語
基于S1C33L11芯片在嵌入式操作系統基礎上實現的USB雙向通信嚴格遵循USB1.1協議,充分利用了S1C33L11芯片的內置功能和嵌入式操作系統的作用,具有交互作用強、嵌入式操作系統中設備無關性好的特點。










 工商網監
工商網監
評論