 電子發(fā)燒友App
電子發(fā)燒友App


在20世紀(jì)70年代起出現(xiàn)了國產(chǎn)的連續(xù)變倍體視顯微鏡,由于明顯優(yōu)于間隔變倍類型的體視顯微鏡,從此在體視顯微鏡領(lǐng)域占據(jù)了主導(dǎo)地位。連續(xù)變倍體視顯微鏡有兩種基本形式:一是有一組主物鏡中間像平面平行于物鏡的平面;二是由格里諾發(fā)明的機(jī)型,其是由兩支完全相同的成對物鏡,其光軸夾角在11°~14°間,特點(diǎn)是容易校正像差且成本低。因此后者仍是連續(xù)變倍體視顯微鏡的主流機(jī)型。
體視顯微鏡廣泛應(yīng)用于生物解剖、微生物觀察、顯微外科、礦物結(jié)構(gòu)觀察和工業(yè)生產(chǎn)。工業(yè)主要應(yīng)用于電子制造業(yè)、半導(dǎo)體以及鐘表等精細(xì)零部件生產(chǎn)、裝配、質(zhì)量檢驗(yàn)方面,對于有些工序是必備的工藝裝備。盡管體視顯微鏡是雙目觀察且連續(xù)變倍,立體感強(qiáng),仍然容易使操作人員產(chǎn)生疲勞感。隨著CCD和CMOS圖像傳感器的出現(xiàn)且成本不斷降低,出現(xiàn)了單筒連續(xù)變倍視頻顯微鏡。視頻單筒顯微鏡具有視野寬廣、直觀真實(shí)、操作簡單且操作人員不易產(chǎn)生疲勞感的優(yōu)點(diǎn)而發(fā)展迅速。在生產(chǎn)線已有取代雙目觀察的體視顯微鏡之趨勢。
1、 連續(xù)變倍視頻顯微鏡及智能化
1.1 連續(xù)變倍視頻顯微鏡的工作原理
連續(xù)變倍視頻顯微鏡(下稱視頻顯微鏡),始于雙目觀察式體視顯微鏡。其光學(xué)系統(tǒng)主要由連續(xù)變倍物鏡、目鏡和附加前置物鏡3部分組成,如圖1所示。其中連續(xù)變倍物鏡屬于低倍物鏡范圍,是視頻顯微鏡的關(guān)鍵部件。觀測物經(jīng)過光學(xué)系統(tǒng)成像于CCD(或CMOS)的光敏面上,圖像傳感器把光信號轉(zhuǎn)換成電信號(視頻信號),該信號通過電視系統(tǒng)在屏幕CRT屏顯或LCD上顯示出物體的像。圖2為桂電光機(jī)電一體化研究所與梧州市澳特光電儀器公司產(chǎn)學(xué)合作研發(fā)的DT—10單筒連續(xù)變倍視頻顯微鏡。在無前置物鏡和1×目鏡的條件下,變倍比M=1:6.3,0.7~4.5×連續(xù)變倍。通過C接口與1/3inch CCD連接后,顯微圖像在CLD上顯示。光學(xué)系統(tǒng)還要使用光強(qiáng)可調(diào)的LED同軸光照明或環(huán)形LED陣列外照明。
1.2 視頻顯微鏡的自動(dòng)化、智能化改造
(1)問題的提出:機(jī)器視覺被工業(yè)生產(chǎn)過程在線自動(dòng)檢測廣泛應(yīng)用,連續(xù)變倍視頻顯微鏡的“手動(dòng)調(diào)節(jié)+視頻觀察”模式不能適應(yīng)在線自動(dòng)檢測的要求。
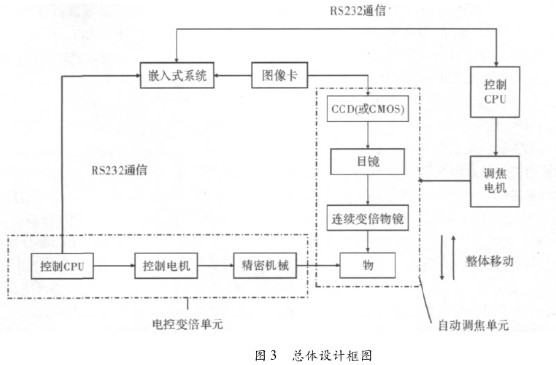
(2)總體設(shè)計(jì)方案:智能型連續(xù)變倍視頻顯微鏡實(shí)質(zhì)是在連續(xù)變倍系統(tǒng)中應(yīng)用嵌入式技術(shù),取代傳統(tǒng)計(jì)算機(jī)來自動(dòng)控制顯微鏡動(dòng)作的自動(dòng)系統(tǒng),在降低了成本的同時(shí)能快速實(shí)現(xiàn)自動(dòng)變倍、調(diào)焦和檢測功能,其簡潔而實(shí)用的技術(shù)讓取代人工變倍以及電腦變倍的視頻顯微鏡成為可能。從需求看,要具有自動(dòng)調(diào)焦和電控變倍兩大功能。1)從文獻(xiàn)可知,設(shè)計(jì)的自動(dòng)調(diào)焦方案思路是光學(xué)系統(tǒng)采集到的顯微圖像經(jīng)“CCD+PC”檢測,步進(jìn)電機(jī)驅(qū)動(dòng)實(shí)施。2)電控變倍方案適用于替代手動(dòng)在變倍手輪上實(shí)現(xiàn)不同角度的轉(zhuǎn)動(dòng),而達(dá)到光學(xué)系統(tǒng)連續(xù)變倍的目的。3)綜合上述思路,形成了文中總體設(shè)計(jì)方案,如圖3所示。
2、 自動(dòng)視頻顯微鏡機(jī)械結(jié)構(gòu)設(shè)計(jì)
出于成本考慮,系統(tǒng)結(jié)構(gòu)框架采用桂電光機(jī)電一體化研究所與梧州市澳特光電儀器公司合作研發(fā)的DT—10單筒連續(xù)變倍視頻顯微鏡的主體部分,在調(diào)焦和變倍上改造而成。
物鏡的移動(dòng)一般使用步進(jìn)電機(jī)驅(qū)動(dòng),傳動(dòng)機(jī)構(gòu)有齒輪傳動(dòng)、精密絲杠傳動(dòng)和壓電陶瓷等。齒輪傳動(dòng)結(jié)構(gòu)較為簡單,傳動(dòng)比可調(diào),傳動(dòng)速度快;缺點(diǎn)是:受嚙合精度影響,由磨損間隙可造成一定空回失步,傳動(dòng)精度較低。精密絲杠容易實(shí)現(xiàn)高精度位移,缺點(diǎn)是移動(dòng)速度較慢、影響調(diào)節(jié)速度。壓電陶瓷利用壓電效應(yīng)原理,位移精度較高,可用電路控制位移大小;缺點(diǎn)是移動(dòng)范圍較小,只能用作小位移高精度微調(diào)。基于連續(xù)變倍視頻顯微鏡的景深較大,調(diào)焦、變倍的精度要求較低,因此采用齒輪傳動(dòng)機(jī)構(gòu)。
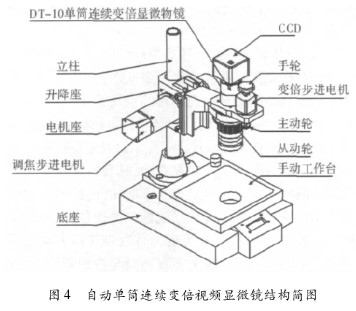
連續(xù)變倍視頻顯微鏡的電控變倍采用齒輪傳動(dòng),兩齒輪分別安裝在連續(xù)變倍視頻顯微鏡的變倍手輪和步進(jìn)電機(jī)軸上,結(jié)構(gòu)簡單,使變倍手輪轉(zhuǎn)動(dòng)角度可控,實(shí)現(xiàn)電控變倍。傳動(dòng)比為1:4,傳動(dòng)齒輪模數(shù)為0.5。通過齒輪齒條傳動(dòng),將電機(jī)的轉(zhuǎn)動(dòng)轉(zhuǎn)化為物鏡的移動(dòng),實(shí)現(xiàn)快速調(diào)焦。圖4為自動(dòng)單筒連續(xù)變倍視頻顯微鏡結(jié)構(gòu)圖。
3、 自動(dòng)視頻顯微鏡伺服控制系統(tǒng)
3.1 電控變倍
3.1.1 連續(xù)變倍光學(xué)系統(tǒng)
變倍系統(tǒng)指焦距在一定范圍內(nèi)連續(xù)改變而像面位置保持不變的光學(xué)系統(tǒng)。目前變倍鏡頭均是用改變透鏡組之間的間隔來改變整個(gè)物鏡的焦距,在移動(dòng)透鏡改變焦距時(shí),總是伴隨著像面的移動(dòng),固此要對像面的移動(dòng)給予補(bǔ)償,主要有光學(xué)補(bǔ)償和機(jī)械補(bǔ)償兩種方式。目前后者是主流的方法。變倍鏡頭要根據(jù)變倍組與補(bǔ)償組位移間的數(shù)值關(guān)系計(jì)算出補(bǔ)償曲線,從而設(shè)計(jì)出補(bǔ)償像面移動(dòng)的凸輪機(jī)構(gòu)。通過旋轉(zhuǎn)加工了凸輪曲線槽的鏡筒,實(shí)現(xiàn)了連續(xù)變倍且又保證像面位置不變的目標(biāo)。
3.1.2 變倍自動(dòng)化改造
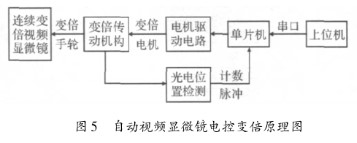
連續(xù)變倍視頻顯微鏡的變倍自動(dòng)化改造,是控制步進(jìn)電機(jī)通過傳動(dòng)裝置使變倍手輪精確地轉(zhuǎn)動(dòng)不同角度,實(shí)現(xiàn)自動(dòng)調(diào)節(jié)不同放大倍數(shù)。電路控制部分的設(shè)計(jì)主要包括:硬件電路的設(shè)計(jì)、單片機(jī)控制程序的編寫和串口數(shù)據(jù)傳送部分的設(shè)計(jì)。硬件電路主要完成對脈沖進(jìn)行整形倍頻以及對單片機(jī)發(fā)送的指令進(jìn)行有效傳遞。單片機(jī)控制程序主要實(shí)現(xiàn)對變倍手輪特定轉(zhuǎn)動(dòng)角度的控制。串口數(shù)據(jù)傳送部分主要完成上位機(jī)指令和數(shù)據(jù)的發(fā)送以及有效的反饋,以確保數(shù)據(jù)正確發(fā)送。圖5為自動(dòng)視頻顯微鏡電控變倍原理框圖。
3.2 自動(dòng)調(diào)焦
調(diào)焦是指沿光軸方向改變物面與物鏡的相對位置,使物像關(guān)系滿足高斯關(guān)系,以獲得清晰的物鏡初次像的工作過程。
基于PC機(jī)的自動(dòng)調(diào)焦實(shí)驗(yàn)平臺(tái),已搭建有JX4自動(dòng)正置金相顯微鏡及多媒體互動(dòng)實(shí)驗(yàn)平臺(tái)等較成熟的儀器,并基于此類實(shí)驗(yàn)平臺(tái)做了一系列調(diào)焦實(shí)驗(yàn)。文中設(shè)計(jì)了基于嵌入式自動(dòng)調(diào)焦處理系統(tǒng),并將基于PC機(jī)電自動(dòng)調(diào)焦搜索算法進(jìn)行了嵌入式移植,依賴于體積小、功耗低、方便系統(tǒng)集成的嵌入式處理系統(tǒng)來實(shí)現(xiàn)。自動(dòng)調(diào)焦系統(tǒng)是一個(gè)集成光機(jī)電等環(huán)節(jié)的閉環(huán)控制系統(tǒng),設(shè)計(jì)的自動(dòng)調(diào)焦試驗(yàn)系統(tǒng)框圖如圖6所示。
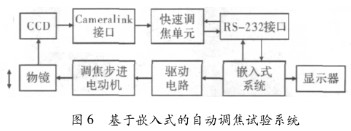
在自動(dòng)連續(xù)變倍視頻顯微鏡中,載物臺(tái)上物體經(jīng)物鏡和光學(xué)接口成像于CCD上,由一路Cameralink接口數(shù)字視頻采集。由嵌入式快速自動(dòng)調(diào)焦單元進(jìn)行圖像的清晰度計(jì)算,并分析圖像的離焦?fàn)顟B(tài),然后通過RS-232接口發(fā)送命令和數(shù)據(jù)給單片機(jī)系統(tǒng)來控制調(diào)焦步進(jìn)電動(dòng)機(jī)的步距和轉(zhuǎn)向進(jìn)行調(diào)焦。該工作過程實(shí)質(zhì)上是一個(gè)閉環(huán)控制過程,不斷地重復(fù)循環(huán),直到找到最清晰圖像時(shí)停止。整個(gè)系統(tǒng)由自動(dòng)調(diào)焦算法系統(tǒng)取代PC機(jī)處理環(huán)節(jié),自動(dòng)調(diào)焦的實(shí)現(xiàn)只需將原PC機(jī)中開發(fā)的應(yīng)用程序移植到自動(dòng)調(diào)焦算法處理系統(tǒng)即可。
自動(dòng)調(diào)焦系統(tǒng)的軟件由兩部分組成:自動(dòng)調(diào)焦的圖像算法處理和嵌入式系統(tǒng)與微控制器系統(tǒng)的通信處理。在自動(dòng)調(diào)焦的圖像算法處理中,采用深度與對比度相比較的面掃描圖像處理算法。
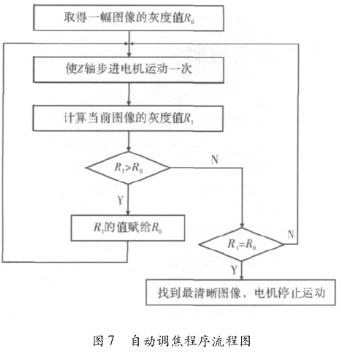
由于CCD采集到的圖像是全彩色圖像,圖像的大小為320×320,若對其進(jìn)行全部處理,則整個(gè)自動(dòng)調(diào)焦過程的速度會(huì)變慢,為提高自動(dòng)調(diào)焦的速度,取其圖像的一部分來進(jìn)行處理。在實(shí)驗(yàn)過程中,選取圖像中央的60×60的圖像作為自動(dòng)調(diào)焦的對象。首先將全彩色圖像轉(zhuǎn)化為0~255級的灰度圖像,利用自動(dòng)調(diào)焦的圖像處理算法計(jì)算出當(dāng)前圖像的灰度值R1,并與上次取得的圖像灰度值風(fēng)進(jìn)行比較,若R1》R0,則嵌入式系統(tǒng)發(fā)出聚焦命令,并傳送給微控制器系統(tǒng),使圖像的清晰度更換一次;然后再通過嵌入式系統(tǒng)取得當(dāng)前圖像,并進(jìn)行比較,直至找到最清晰的圖像為止。自動(dòng)調(diào)焦的程序框圖如圖7所示。
4、 結(jié)束語
自動(dòng)連續(xù)變倍視頻顯微鏡是光學(xué)技術(shù)、光電技術(shù)、計(jì)算機(jī)圖像處理技術(shù)、自動(dòng)控制與傳動(dòng)技術(shù)的集成,也是光學(xué)顯微鏡智能化、自動(dòng)化要求的結(jié)果,其具有效率高、響應(yīng)快、成本低等優(yōu)點(diǎn),基本滿足某些工業(yè)生產(chǎn)過程在線自動(dòng)檢測的要求。為視頻顯微鏡的智能化、自動(dòng)化提供了可行方案。
責(zé)任編輯:gt










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論