 電子發(fā)燒友App
電子發(fā)燒友App


引言
----在無(wú)源微波遙感中,微波輻射計(jì)是一種獲取場(chǎng)景微波特征的重要手段。微波輻射計(jì)通常是一部超外差接收機(jī),通過(guò)接收被測(cè)場(chǎng)景在一定頻帶內(nèi)的電磁輻射,轉(zhuǎn)換為輸出的低頻信號(hào),來(lái)表征被測(cè)場(chǎng)景的地物信息。利用微波輻射計(jì)來(lái)探測(cè)、接收被測(cè)目標(biāo)、背景在微波波段的電磁輻射,并把接收到的輻射信號(hào)按比例用偽彩色圖像直觀(guān)地顯現(xiàn)出來(lái)的系統(tǒng)稱(chēng)為微波輻射成像系統(tǒng)。
----微波輻射成像系統(tǒng)要求在惡劣的環(huán)境和天氣下長(zhǎng)期穩(wěn)定地進(jìn)行天線(xiàn)掃描成像,所以要求系統(tǒng)設(shè)備用于天線(xiàn)掃描控制及數(shù)據(jù)采集的電路盡量簡(jiǎn)單、穩(wěn)定。基于以上的要求,采用了TI公司所生產(chǎn)的MSP430F149型超低功耗FLASH單片機(jī)作為這套系統(tǒng)的從機(jī)部分,該單片機(jī)有60KB的FLASH存儲(chǔ)器和2KB的RAM存儲(chǔ)器,可以在一臺(tái)PC及JTAG控制器的幫助下實(shí)現(xiàn)程序的下載,完成程序調(diào)試。
----系統(tǒng)總體結(jié)構(gòu)及硬件設(shè)計(jì)
● 系統(tǒng)整體結(jié)構(gòu)
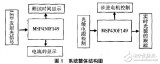
----微波輻射成像系統(tǒng)的原理如圖1所示。
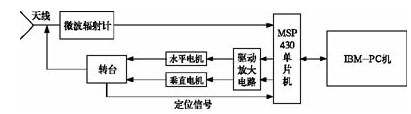
----系統(tǒng)采用主從式計(jì)算機(jī)進(jìn)行工作,其中主機(jī)采用PC機(jī)進(jìn)行人機(jī)對(duì)話(huà)以及實(shí)時(shí)成像,從機(jī)采用MSP430F149單片機(jī)進(jìn)行步進(jìn)電機(jī)的智能控制以及高速數(shù)據(jù)采集,主從機(jī)之間采用RS232串行通信端口進(jìn)行通信。成像時(shí),先由PC機(jī)送出命令參數(shù),再由單片機(jī)根據(jù)命令發(fā)出相應(yīng)的控制信號(hào)通過(guò)驅(qū)動(dòng)放大電路進(jìn)入電機(jī),分別或者同時(shí)控制兩臺(tái)電機(jī)的轉(zhuǎn)向與轉(zhuǎn)速,使得輻射計(jì)天線(xiàn)進(jìn)行自動(dòng)掃描,同時(shí)輻射計(jì)將接收到的信號(hào)進(jìn)行積分后輸入到MSP430單片機(jī)集成的12位ADC的模擬信號(hào)輸入通道,進(jìn)行12位的A/D轉(zhuǎn)換,然后由單片機(jī)通過(guò)串口發(fā)送程序送入主機(jī)存儲(chǔ)并顯示相應(yīng)的偽彩色圖像。
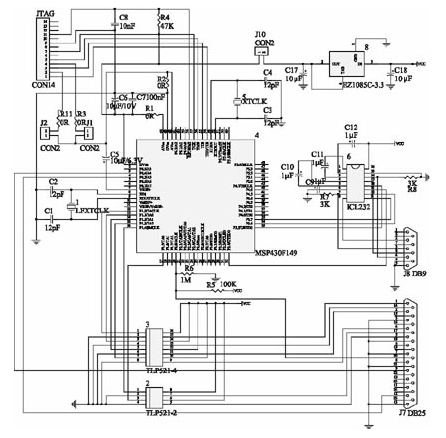
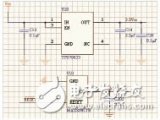
----為了方便以后的軟件升級(jí),在電路中預(yù)留了JTAG調(diào)試口可以隨時(shí)進(jìn)行軟件調(diào)試,并且將數(shù)據(jù)采集信號(hào)線(xiàn),電機(jī)控制信號(hào)線(xiàn)和定位信號(hào)線(xiàn)統(tǒng)一用一個(gè)并行接口口輸出,方便系統(tǒng)安裝調(diào)試,從機(jī)部分硬件電路原理如圖2。
● 天線(xiàn)控制電路
----使用MSP430F149的P1端口來(lái)控制兩個(gè)電機(jī),每次輸出的是一個(gè)字節(jié),它的高三位控制水平電機(jī),中間三位控制縱向電機(jī)。由于控制電機(jī)驅(qū)動(dòng)柜要求的驅(qū)動(dòng)信號(hào)電平和信號(hào)電流比單片機(jī)I/O口輸出的信號(hào)電平和電流都高,同時(shí)為了使單片機(jī)的輸出電平不受驅(qū)動(dòng)放大電路的影響,使用了兩片光電耦合器TLP521為電機(jī)驅(qū)動(dòng)電路提供驅(qū)動(dòng)信號(hào)。
● 數(shù)據(jù)采集電路
----MSP430F149具有12位ADC,輻射計(jì)輸出信號(hào)可直接送入該單片機(jī)進(jìn)行12位A/D轉(zhuǎn)換而無(wú)需外圍擴(kuò)展A/D轉(zhuǎn)換芯片,多種不同的采樣模式可以有效降低軟件的復(fù)雜度。由于需要定時(shí)利用單個(gè)通道接收信號(hào),因此采用單通道單次采樣的模式進(jìn)行數(shù)據(jù)采集。
● 通信電路
----MSP430F149與PC機(jī)的通信采用RS232串行通信總線(xiàn),采用HARRIS公司生產(chǎn)的ICL232作為RS232電平轉(zhuǎn)換芯片。
● 定位電路
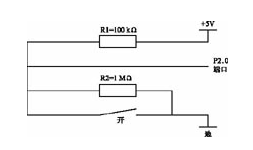
----在微波成像系統(tǒng)中,為了防止電機(jī)的失步,保證天線(xiàn)掃描場(chǎng)景與PC機(jī)所成圖像場(chǎng)景一致必須在單片機(jī)上外加定位電路,使得天線(xiàn)掃描一周后能夠確定天線(xiàn)的零位,在天線(xiàn)的轉(zhuǎn)臺(tái)上安裝一個(gè)撞針,并接單片機(jī)的P2.0端口,平時(shí)保持開(kāi)路狀態(tài),P2.0端口保持高電平,當(dāng)天線(xiàn)旋轉(zhuǎn)至零位時(shí),撞針與地線(xiàn)接觸,發(fā)生短路,P2.0端口電平變?yōu)?V,單片機(jī)檢測(cè)到電平發(fā)生跳變,使單片機(jī)產(chǎn)生中斷信號(hào),由此判定天線(xiàn)是否到零位。等效電路如圖3所示。
● 電源電路
----除MSP430F149外,其他芯片均需要電源提供+5V的電壓才能工作。系統(tǒng)統(tǒng)一外接5V電源,用電壓轉(zhuǎn)換芯片EZ1085C-3.3將5V的電壓轉(zhuǎn)換為3.3V為單片機(jī)供電。
----系統(tǒng)軟件設(shè)計(jì)
● 功能需求及流程
----微波輻射成像系統(tǒng)的軟件部分要完成的功能主要如下。
----(1)實(shí)時(shí)進(jìn)行微波掃描成像,要同時(shí)完成控制步進(jìn)電機(jī)以一定的速度旋轉(zhuǎn);按一定的采樣速率采集輻射計(jì)輸出的電壓值;實(shí)時(shí)在顯示器上顯示輻射成像系統(tǒng)掃描的場(chǎng)景的偽彩色圖像;存儲(chǔ)輻射圖像到硬盤(pán);打印輻射圖像;
----(2)對(duì)已有的輻射圖像重現(xiàn)、觀(guān)察和分析;
----(3)對(duì)輻射計(jì)進(jìn)行定標(biāo)計(jì)算;
----(4)單獨(dú)驅(qū)動(dòng)步進(jìn)電機(jī)以不同的方式運(yùn)動(dòng)。
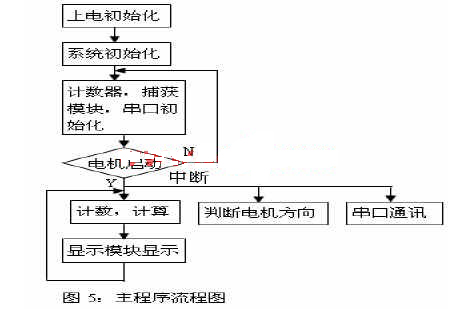
----其中MSP430單片機(jī)要完成的工作有:接收主機(jī)發(fā)送的命令參數(shù),利用機(jī)內(nèi)的定時(shí)器定時(shí)中斷,中斷處理程序決定是否驅(qū)動(dòng)電機(jī)走一步或采樣一點(diǎn);要采樣一點(diǎn),從數(shù)據(jù)端口讀入輻射計(jì)接收機(jī)的輸出信號(hào)并進(jìn)行A/D轉(zhuǎn)換,要驅(qū)動(dòng)步進(jìn)電機(jī)走一步,對(duì)片上I/O端口發(fā)出一個(gè)驅(qū)動(dòng)脈沖。以上的操作周期為毫秒級(jí)。單片機(jī)與PC機(jī)通過(guò)串行通信端口進(jìn)行數(shù)據(jù)交換。
----程序流程圖如圖4所示。
● 天線(xiàn)掃描方式選擇及實(shí)現(xiàn)
----在微波輻射測(cè)量中,采用天線(xiàn)主波束掃描可以對(duì)所感興趣的場(chǎng)景實(shí)現(xiàn)輻射測(cè)量成像。由于輻射計(jì)相對(duì)場(chǎng)景是固定的,故須采用二維機(jī)械掃描。
---- 在二維機(jī)械掃描過(guò)程中,根據(jù)采樣方式的不同,通常可以采用兩種方式。
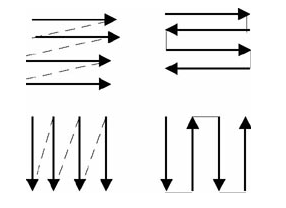
----在鐘擺掃描方式中,天線(xiàn)如鐘擺一樣在一維往返掃描,每條掃描線(xiàn)均進(jìn)行采樣,一行掃描完后,天線(xiàn)的另一維抬高一個(gè)角度繼續(xù)掃描下一行,直到掃完全部區(qū)域。根據(jù)選用哪一維擺動(dòng)以及回程是否采樣,這種方式又以分為4種情況,如圖5所示。其中方式a、c均為正程掃描采樣,逆程不采樣方式,其優(yōu)點(diǎn)是各行(或列)之間沒(méi)有機(jī)械齒距誤差,但成像時(shí)間差不多是方式b、d的兩倍,而方式b、d則有成像速度快,有齒距誤差的特點(diǎn),不過(guò)這種誤差比較均勻,可以通過(guò)機(jī)械校正來(lái)彌補(bǔ)。
----在圓周掃描方式中,通常是天線(xiàn)的水平一維以勻速進(jìn)行旋轉(zhuǎn),在一定的角度范圍內(nèi)采樣,每旋轉(zhuǎn)一周后,縱向一維抬高一個(gè)角度。它的機(jī)械實(shí)現(xiàn)簡(jiǎn)便,有足夠的時(shí)間和空間定標(biāo),由于掃描過(guò)程中不需要來(lái)回的加減速與換向過(guò)程,故掃描速度會(huì)有很大的提高。
----由于兩電機(jī)的轉(zhuǎn)速,轉(zhuǎn)動(dòng)時(shí)機(jī)都不相同,因而保證它們的連續(xù)變相就十分重要,否則,電機(jī)的轉(zhuǎn)動(dòng)就不會(huì)平穩(wěn),容易損壞,因此要有精確的時(shí)鐘定時(shí)裝置對(duì)系統(tǒng)的電機(jī)控制和數(shù)據(jù)采集部分進(jìn)行中斷操作,才能使兩臺(tái)電機(jī)分別或者同時(shí)平穩(wěn)的運(yùn)行,采樣位置準(zhǔn)確。在程序中采用了MSP430單片機(jī)片內(nèi)的16位定時(shí)器Timer_A進(jìn)行定時(shí)中斷,當(dāng)程序運(yùn)行時(shí),首先根據(jù)主機(jī)發(fā)送的命令參數(shù)計(jì)算出掃描和采樣所需要的定時(shí)時(shí)間,然后預(yù)置相應(yīng)的定時(shí)器最大計(jì)數(shù)值(最大不超過(guò)65536),定時(shí)器從0計(jì)數(shù)至最大值時(shí)發(fā)生中斷,進(jìn)入中斷子程序,根據(jù)程序設(shè)定的標(biāo)志位mxy判斷是水平還是垂直電機(jī)轉(zhuǎn)動(dòng),如果要控制水平電機(jī),則調(diào)用go_stepx(cw,direction_x)函數(shù),該函數(shù)讀出P1端口前三位,根據(jù)其值確定下一相的控制字cw,同時(shí),該函數(shù)返回改變后的cw值,可供下一次調(diào)用。如果要控制縱向電機(jī),則調(diào)用go_stepy(cw,direction_y)函數(shù)讀出P1端口中間三位,它也返回改變后的cw值,然后驅(qū)動(dòng)電機(jī)走一步,執(zhí)行完畢后返回主程序。當(dāng)電機(jī)走過(guò)相應(yīng)的采樣步數(shù)后,程序發(fā)生中斷,進(jìn)入采樣處理程序。
數(shù)據(jù)采集模塊設(shè)計(jì)
----采樣處理程序開(kāi)始運(yùn)行時(shí),首先將ADC12控制寄存器中的ADC12SC和ENC置位,將輸入信號(hào)送入采樣保持電路,然后將ADC12SC復(fù)位,停止采樣,啟動(dòng)A/D轉(zhuǎn)換,將模擬信號(hào)轉(zhuǎn)換為12位數(shù)字信號(hào)并存入選擇的轉(zhuǎn)換存儲(chǔ)寄存器,單片機(jī)通過(guò)片內(nèi)的異步通用串行模塊將轉(zhuǎn)換結(jié)果送入主機(jī)內(nèi)進(jìn)行實(shí)時(shí)成像處理。
結(jié)語(yǔ)
----本系統(tǒng)將天線(xiàn)控制及數(shù)據(jù)采集部分和實(shí)時(shí)成像部分分離,并且采用了高度集成的MSP430F149芯片,減少了線(xiàn)路損耗,簡(jiǎn)化了系統(tǒng)結(jié)構(gòu),從而降低了成本并且提高了系統(tǒng)運(yùn)行的穩(wěn)定可靠性。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論