 電子發燒友App
電子發燒友App


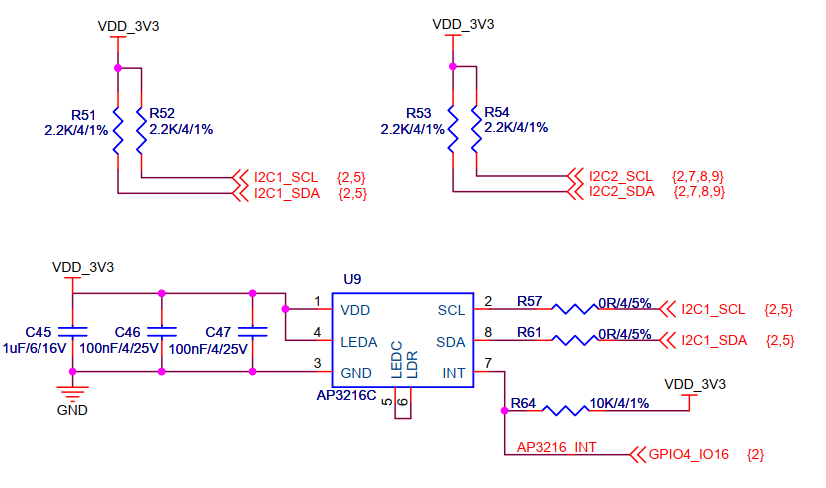
1、AP3216簡介
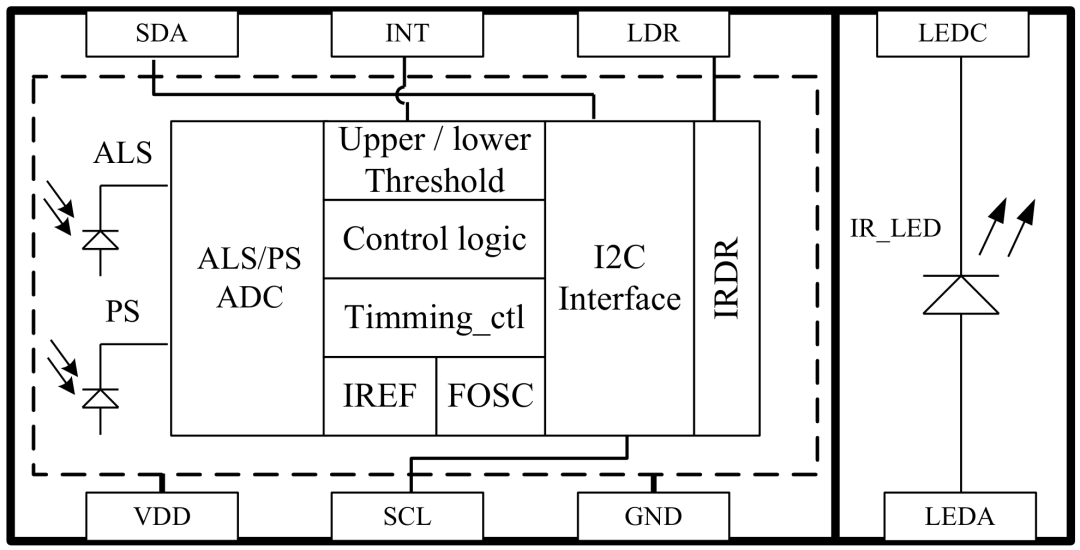
AP3216C 芯片集成了光強傳感器( ALS: Ambient Light Sensor),接近傳感器( PS: Proximity Sensor),還有一個紅外 LED( IR LED)。
這個芯片設計的用途是給手機之類的使用,比如:返回當前環境光強以便調整屏幕亮度;用戶接聽電話時,將手機放置在耳邊后,自動關閉屏幕避免用戶誤觸碰 。
2、IIC驅動簡介
Linux下IIC有兩種驅動方式:一種是按照字符設備驅動方式來驅動IIC;另一種是走Linux下IIC的框架。按照字符設備驅動的方式可以查閱這一篇文章:Linux IIC 字符設備 驅動例子。
這里我們了解學習一下第二種方式,因為找到的AP3216的驅動就是基于IIC驅動框架的,哈哈。
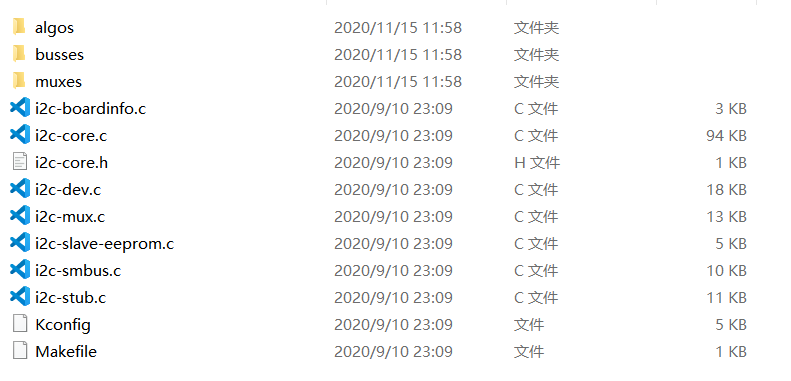
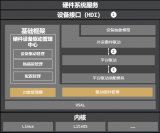
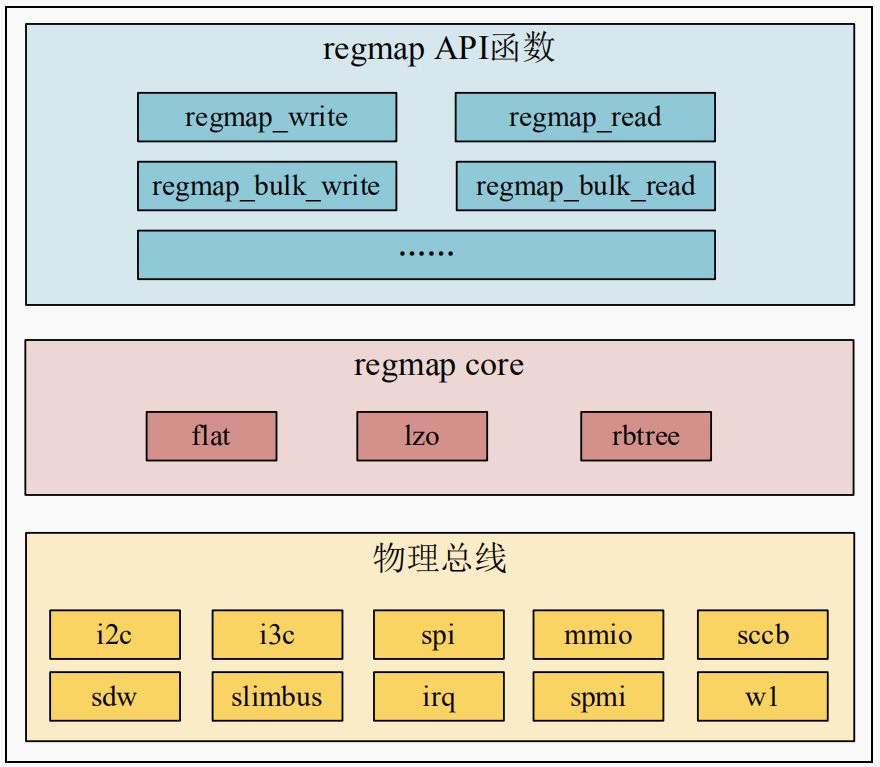
整個IIC的驅動框架相關代碼在driversi2c中,包含的內容有:
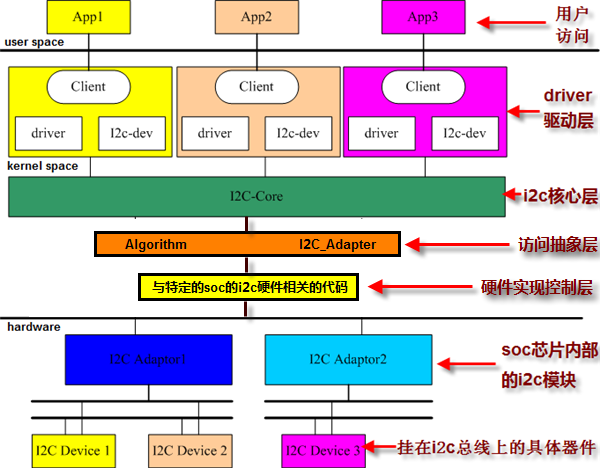
IIC驅動框架可大體分為兩大部分:
① ?I2C 總線驅動:SOC 的 I2C 控制器驅動,也叫做 I2C 適配器驅動。
② ?I2C 設備驅動:針對具體的 I2C 設備而編寫的驅動。
其中,訪問抽象層與I2C核心層數據I2C 總線驅動部分;driver驅動層屬于I2C設備驅動部分。
上面框圖對應的代碼調用層次圖如:
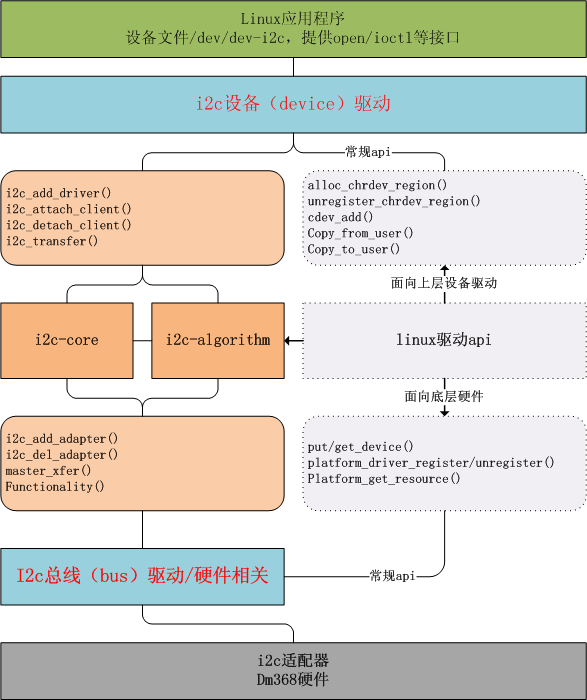
下面的AP3216驅動可以對照這張圖來看看。
4、AP3216實驗
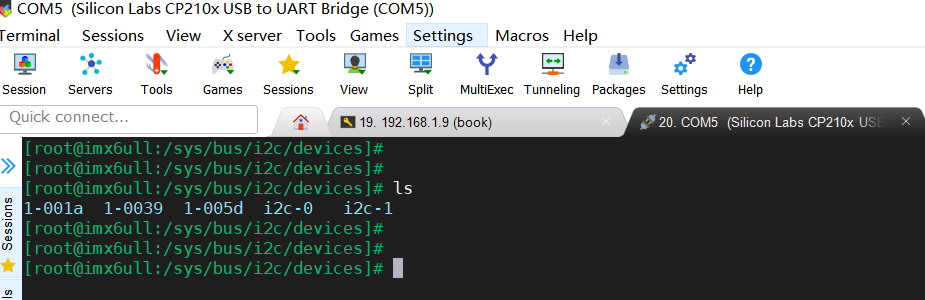
我們使用設備樹來描述AP3216設備信息,首先我們沒有在設備樹中添加AP3216相關節點時,我們系統的I2C設備如:
添加I2C pinctrl,板子上AP3216接的是I2C1:

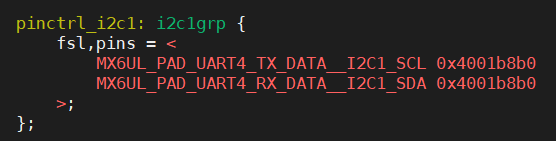
配置寄存器的值都設為0x4001b8b0,這一段是什么意思我們在什么是Pinctrl子系統及GPIO子系統?這篇筆記中也有寫到,就是幾個寄存器及其配置。
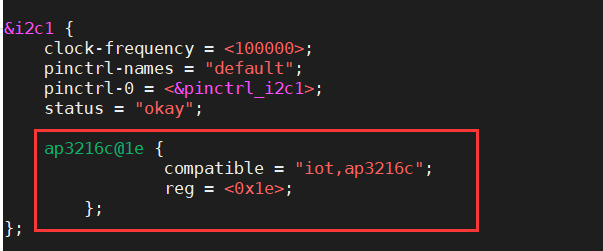
接下來在i2c1節點下添加ap3216節點:
編譯設備樹,傳到開發板上,重啟。此時我們系統的I2C設備有:
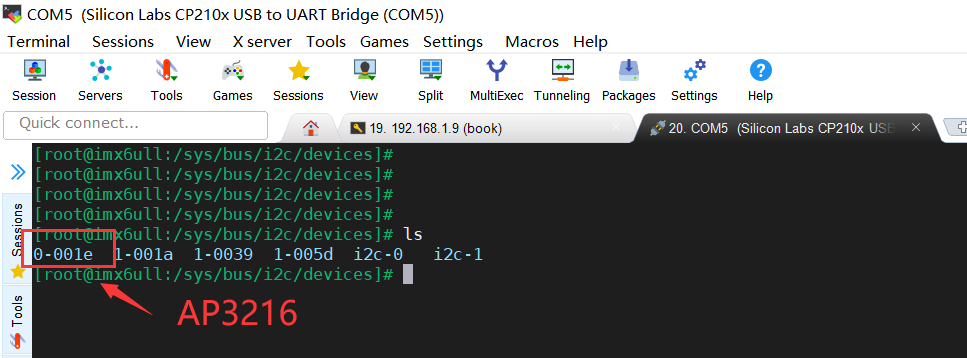
可見,新增的AP3216 I2C設備名就是我們設備樹里設置的。
下面編寫AP3216驅動(以下代碼來源于網絡):
ap3216.c:
#include?
#include?
#include?
#include?
#include?
#include?
#include?
#include?
#include?
#include?
#include?
#include?
#include?
#include?
#include?
#include?
#include?
#include?"ap3216creg.h"
/***************************************************************
文件名??:?ap3216c.c
描述?????:?AP3216C驅動程序
***************************************************************/
#define?AP3216C_CNT?1
#define?AP3216C_NAME?"ap3216c"
?
struct?ap3216c_dev?{
?dev_t?devid;???/*?設備號???*/
?struct?cdev?cdev;??/*?cdev??*/
?struct?class?*class;?/*?類???*/
?struct?device?*device;?/*?設備???*/
?struct?device_node?*nd;?/*?設備節點?*/
?int?major;???/*?主設備號?*/
?void?*private_data;?/*?私有數據?*/
?unsigned?short?ir,?als,?ps;??/*?三個光傳感器數據?*/
};
?
static?struct?ap3216c_dev?ap3216cdev;
?
/*
?*?@description?:?從ap3216c讀取多個寄存器數據
?*?@param?-?dev:??ap3216c設備
?*?@param?-?reg:??要讀取的寄存器首地址
?*?@param?-?val:??讀取到的數據
?*?@param?-?len:??要讀取的數據長度
?*?@return???:?操作結果
?*/
static?int?ap3216c_read_regs(struct?ap3216c_dev?*dev,?u8?reg,?void?*val,?int?len)
{
?int?ret;
?struct?i2c_msg?msg[2];
?struct?i2c_client?*client?=?(struct?i2c_client?*)dev->private_data;
?
?/*?msg[0]為發送要讀取的首地址?*/
?msg[0].addr?=?client->addr;???/*?ap3216c地址?*/
?msg[0].flags?=?0;?????/*?標記為發送數據?*/
?msg[0].buf?=???????/*?讀取的首地址?*/
?msg[0].len?=?1;??????/*?reg長度*/
?
?/*?msg[1]讀取數據?*/
?msg[1].addr?=?client->addr;???/*?ap3216c地址?*/
?msg[1].flags?=?I2C_M_RD;???/*?標記為讀取數據*/
?msg[1].buf?=?val;?????/*?讀取數據緩沖區?*/
?msg[1].len?=?len;?????/*?要讀取的數據長度*/
?
?ret?=?i2c_transfer(client->adapter,?msg,?2);
?if(ret?==?2)?{
??ret?=?0;
?}?else?{
??printk("i2c?rd?failed=%d?reg=%06x?len=%d
",ret,?reg,?len);
??ret?=?-EREMOTEIO;
?}
?return?ret;
}
?
/*
?*?@description?:?向ap3216c多個寄存器寫入數據
?*?@param?-?dev:??ap3216c設備
?*?@param?-?reg:??要寫入的寄存器首地址
?*?@param?-?val:??要寫入的數據緩沖區
?*?@param?-?len:??要寫入的數據長度
?*?@return????:???操作結果
?*/
static?s32?ap3216c_write_regs(struct?ap3216c_dev?*dev,?u8?reg,?u8?*buf,?u8?len)
{
?u8?b[256];
?struct?i2c_msg?msg;
?struct?i2c_client?*client?=?(struct?i2c_client?*)dev->private_data;
?
?b[0]?=?reg;?????/*?寄存器首地址?*/
?memcpy(&b[1],buf,len);??/*?將要寫入的數據拷貝到數組b里面?*/
??
?msg.addr?=?client->addr;?/*?ap3216c地址?*/
?msg.flags?=?0;????/*?標記為寫數據?*/
?
?msg.buf?=?b;????/*?要寫入的數據緩沖區?*/
?msg.len?=?len?+?1;???/*?要寫入的數據長度?*/
?
?return?i2c_transfer(client->adapter,?&msg,?1);
}
?
/*
?*?@description?:?讀取ap3216c指定寄存器值,讀取一個寄存器
?*?@param?-?dev:??ap3216c設備
?*?@param?-?reg:??要讀取的寄存器
?*?@return????:???讀取到的寄存器值
?*/
static?unsigned?char?ap3216c_read_reg(struct?ap3216c_dev?*dev,?u8?reg)
{
?u8?data?=?0;
?
?ap3216c_read_regs(dev,?reg,?&data,?1);
?return?data;
?
#if?0
?struct?i2c_client?*client?=?(struct?i2c_client?*)dev->private_data;
?return?i2c_smbus_read_byte_data(client,?reg);
#endif
}
?
/*
?*?@description?:?向ap3216c指定寄存器寫入指定的值,寫一個寄存器
?*?@param?-?dev:??ap3216c設備
?*?@param?-?reg:??要寫的寄存器
?*?@param?-?data:?要寫入的值
?*?@return???:????無
?*/
static?void?ap3216c_write_reg(struct?ap3216c_dev?*dev,?u8?reg,?u8?data)
{
?u8?buf?=?0;
?buf?=?data;
?ap3216c_write_regs(dev,?reg,?&buf,?1);
}
?
/*
?*?@description :?讀取AP3216C的數據,讀取原始數據,包括ALS,PS和IR, 注意!
?*????:?如果同時打開ALS,IR+PS的話兩次數據讀取的時間間隔要大于112.5ms
?*?@param?-?ir?:?ir數據
?*?@param?-?ps??:?ps數據
?*?@param?-?ps??:?als數據?
?*?@return ??:?無。
?*/
void?ap3216c_readdata(struct?ap3216c_dev?*dev)
{
?unsigned?char?i?=0;
????unsigned?char?buf[6];
?
?/*?循環讀取所有傳感器數據?*/
????for(i?=?0;?i?ir?=?0;?????
?else?????/*?讀取IR傳感器的數據?????*/
??dev->ir?=?((unsigned?short)buf[1]?<als?=?((unsigned?short)buf[3]?<ps?=?0;?????????????????
?else?????/*?讀取PS傳感器的數據????*/
??dev->ps?=?((unsigned?short)(buf[5]?&?0X3F)?<private_data?=?&ap3216cdev;
?
?/*?初始化AP3216C?*/
?ap3216c_write_reg(&ap3216cdev,?AP3216C_SYSTEMCONG,?0x04);??/*?復位AP3216C????*/
?mdelay(50);??????????????/*?AP3216C復位最少10ms??*/
?ap3216c_write_reg(&ap3216cdev,?AP3216C_SYSTEMCONG,?0X03);??/*?開啟ALS、PS+IR???*/
?return?0;
}
?
/*
?*?@description??:?從設備讀取數據?
?*?@param?-?filp??:?要打開的設備文件(文件描述符)
?*?@param?-?buf??:?返回給用戶空間的數據緩沖區
?*?@param?-?cnt??:?要讀取的數據長度
?*?@param?-?offt??:?相對于文件首地址的偏移
?*?@return????:?讀取的字節數,如果為負值,表示讀取失敗
?*/
static?ssize_t?ap3216c_read(struct?file?*filp,?char?__user?*buf,?size_t?cnt,?loff_t?*off)
{
?short?data[3];
?long?err?=?0;
?
?struct?ap3216c_dev?*dev?=?(struct?ap3216c_dev?*)filp->private_data;
?
?ap3216c_readdata(dev);
?
?data[0]?=?dev->ir;
?data[1]?=?dev->als;
?data[2]?=?dev->ps;
?err?=?copy_to_user(buf,?data,?sizeof(data));
?return?0;
}
?
/*
?*?@description??:?關閉/釋放設備
?*?@param?-?filp??:?要關閉的設備文件(文件描述符)
?*?@return????:?0?成功;其他?失敗
?*/
static?int?ap3216c_release(struct?inode?*inode,?struct?file?*filp)
{
?return?0;
}
?
/*?AP3216C操作函數?*/
static?const?struct?file_operations?ap3216c_ops?=?{
?.owner?=?THIS_MODULE,
?.open?=?ap3216c_open,
?.read?=?ap3216c_read,
?.release?=?ap3216c_release,
};
?
?/*
??*?@description?????:?i2c驅動的probe函數,當驅動與
??*????????????????????設備匹配以后此函數就會執行
??*?@param?-?client??:?i2c設備
??*?@param?-?id??????:?i2c設備ID
??*?@return??????????:?0,成功;其他負值,失敗
??*/
static?int?ap3216c_probe(struct?i2c_client?*client,?const?struct?i2c_device_id?*id)
{
?/*?1、構建設備號?*/
?if?(ap3216cdev.major)?{
??ap3216cdev.devid?=?MKDEV(ap3216cdev.major,?0);
??register_chrdev_region(ap3216cdev.devid,?AP3216C_CNT,?AP3216C_NAME);
?}?else?{
??alloc_chrdev_region(&ap3216cdev.devid,?0,?AP3216C_CNT,?AP3216C_NAME);
??ap3216cdev.major?=?MAJOR(ap3216cdev.devid);
?}
?
?/*?2、注冊設備?*/
?cdev_init(&ap3216cdev.cdev,?&ap3216c_ops);
?cdev_add(&ap3216cdev.cdev,?ap3216cdev.devid,?AP3216C_CNT);
?
?/*?3、創建類?*/
?ap3216cdev.class?=?class_create(THIS_MODULE,?AP3216C_NAME);
?if?(IS_ERR(ap3216cdev.class))?{
??return?PTR_ERR(ap3216cdev.class);
?}
?
?/*?4、創建設備?*/
?ap3216cdev.device?=?device_create(ap3216cdev.class,?NULL,?ap3216cdev.devid,?NULL,?AP3216C_NAME);
?if?(IS_ERR(ap3216cdev.device))?{
??return?PTR_ERR(ap3216cdev.device);
?}
?
?ap3216cdev.private_data?=?client;
?
?return?0;
}
?
/*
?*?@description?????:?i2c驅動的remove函數,移除i2c驅動的時候此函數會執行
?*?@param?-?client??:?i2c設備
?*?@return??????????:?0,成功;其他負值,失敗
?*/
static?int?ap3216c_remove(struct?i2c_client?*client)
{
?/*?刪除設備?*/
?cdev_del(&ap3216cdev.cdev);
?unregister_chrdev_region(ap3216cdev.devid,?AP3216C_CNT);
?
?/*?注銷掉類和設備?*/
?device_destroy(ap3216cdev.class,?ap3216cdev.devid);
?class_destroy(ap3216cdev.class);
?return?0;
}
?
/*?傳統匹配方式ID列表?*/
static?const?struct?i2c_device_id?ap3216c_id[]?=?{
?{"iot,ap3216c",?0},??
?{}
};
?
/*?設備樹匹配列表?*/
static?const?struct?of_device_id?ap3216c_of_match[]?=?{
?{?.compatible?=?"iot,ap3216c"?},
?{?/*?Sentinel?*/?}
};
?
/*?i2c驅動結構體?*/?
static?struct?i2c_driver?ap3216c_driver?=?{
?.probe?=?ap3216c_probe,
?.remove?=?ap3216c_remove,
?.driver?=?{
???.owner?=?THIS_MODULE,
??????.name?=?"ap3216c",
??????.of_match_table?=?ap3216c_of_match,?
?????},
?.id_table?=?ap3216c_id,
};
?????
/*
?*?@description?:?驅動入口函數
?*?@param???:?無
?*?@return???:?無
?*/
static?int?__init?ap3216c_init(void)
{
?int?ret?=?0;
?
?ret?=?i2c_add_driver(&ap3216c_driver);
?return?ret;
}
?
/*
?*?@description?:?驅動出口函數
?*?@param???:?無
?*?@return???:?無
?*/
static?void?__exit?ap3216c_exit(void)
{
?i2c_del_driver(&ap3216c_driver);
}
?
/*?module_i2c_driver(ap3216c_driver)?*/
?
module_init(ap3216c_init);
module_exit(ap3216c_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("pjw");
驅動詳解可查閱注釋及配合上訴的I2C驅動框架的框圖及數據手冊理解。
ap3216creg.h:
#ifndef?AP3216C_H #define?AP3216C_H /*************************************************************** 文件名??:?ap3216creg.h 描述?????:?AP3216C寄存器地址描述頭文件 ***************************************************************/ #define?AP3216C_ADDR?????0X1E?/*?AP3216C器件地址??*/ /*?AP3316C寄存器?*/ #define?AP3216C_SYSTEMCONG?0x00?/*?配置寄存器???????*/ #define?AP3216C_INTSTATUS?0X01?/*?中斷狀態寄存器???*/ #define?AP3216C_INTCLEAR?0X02?/*?中斷清除寄存器???*/ #define?AP3216C_IRDATALOW?0x0A?/*?IR數據低字節?????*/ #define?AP3216C_IRDATAHIGH?0x0B?/*?IR數據高字節?????*/ #define?AP3216C_ALSDATALOW?0x0C?/*?ALS數據低字節????*/ #define?AP3216C_ALSDATAHIGH?0X0D?/*?ALS數據高字節????*/ #define?AP3216C_PSDATALOW?0X0E?/*?PS數據低字節?????*/ #define?AP3216C_PSDATAHIGH?0X0F?/*?PS數據高字節?????*/ #endif
ap3216應用:
ap3216cApp.c:
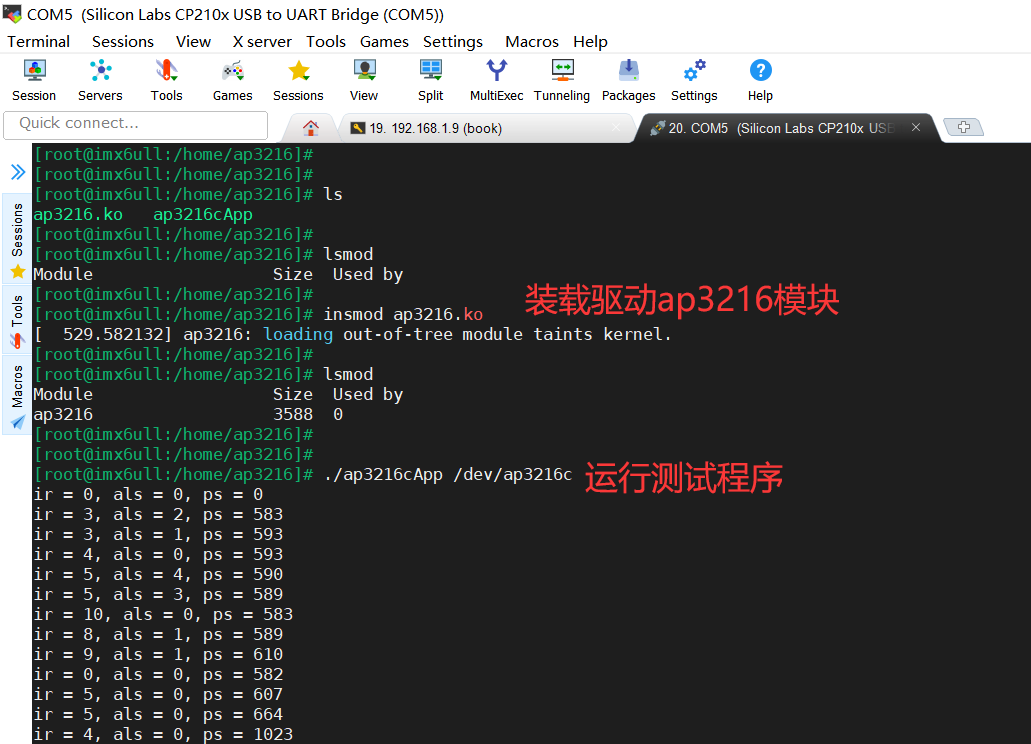
#include?"stdio.h" #include?"unistd.h" #include?"sys/types.h" #include?"sys/stat.h" #include?"sys/ioctl.h" #include?"fcntl.h" #include?"stdlib.h" #include?"string.h" #include? #include? #include? #include? #include? /*************************************************************** 文件名??:?ap3216cApp.c 描述?????: ap3216c設備測試APP。 使用方法??:./ap3216cApp /dev/ap3216c ***************************************************************/ ? /* ?*?@description??:?main主程序 ?*?@param?-?argc??:?argv數組元素個數 ?*?@param?-?argv??:?具體參數 ?*?@return????:?0?成功;其他?失敗 ?*/ int?main(int?argc,?char?*argv[]) { ?int?fd; ?char?*filename; ?unsigned?short?databuf[3]; ?unsigned?short?ir,?als,?ps; ?int?ret?=?0; ? ?if?(argc?!=?2)?{ ??printf("Error?Usage! "); ??return?-1; ?} ? ?filename?=?argv[1]; ?fd?=?open(filename,?O_RDWR); ?if(fd?編寫Makefile,從之前的文章拷貝過來修改:
KERN_DIR?=?/home/book/100ask_imx6ull-sdk/Linux-4.9.88 all: ?make?-C?$(KERN_DIR)?M=`pwd`?modules? ?$(CROSS_COMPILE)gcc?-o?ap3216cApp?ap3216cApp.c? clean: ?make?-C?$(KERN_DIR)?M=`pwd`?modules?clean ?rm?-rf?modules.order ?rm?-f?ap3216cApp #?參考內核源碼drivers/char/ipmi/Makefile #?要想把a.c,?b.c編譯成ab.ko,?可以這樣指定: #?ab-y?:=?a.o?b.o #?obj-m?+=?ab.o obj-m?+=?ap3216.o編譯得到ap3216.ko及ap3216cApp,傳到板子上運行:
以上就是本次的實驗分享,如果文章對你有幫助,歡迎轉發,謝謝!
編輯:黃飛
?













 工商網監
工商網監
評論