 電子發燒友App
電子發燒友App


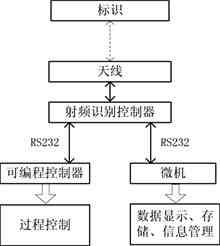
一個典型的RFID射頻識別系統包括四部分:標識、天線、控制器和主機(PLC或PC),系統結構圖見圖1。
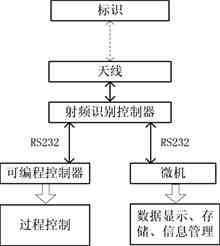
圖1 RFID射頻識別系統結構圖
標識一般固定在跟蹤識別對象上,如托盤、貨架、小車、集裝箱,在標識中可以存儲一定字節的數據,用于記錄識別對象的重要信息。當標識隨識別對象移動時,標識就成為一個移動的數據載體。以RFID在計算機組裝線上的應用為例,標識中可以記錄機箱的類型(立式還是臥式)、所需配件及型號(主板、硬盤、CD-ROM等)、需要完成的工序等。又如在郵包的自動分揀和跟蹤應用中,可以在標識中存儲郵包的始發地、目的地、路由等信息。
天線的作用是通過無線電磁波從標識中讀數據或寫數據到標識中。天線形狀大小各異,大的可以做成貨倉出口的門或通道,小的可以小到1mm。
控制器用于控制天線與PLC或PC間的數據通信,有的控制器還帶有數字量輸入輸出,可以直接用于控制。控制器與天線合稱讀寫器。
PLC或PC根據讀寫器捕捉到的標識中的數據完成相應的過程控制,或進行數據分析、顯示和存儲。
本文即以具有代表性的美國EMS(Escort Memory Systems)公司的13.56MHz無源RFID射頻識別讀寫器LRP830為例,介紹了PLC及PC與RFID讀寫器進行串行通訊,從而獲取標識數據,用于控制或數據處理的具體實現方法。
2 RFID射頻識別讀寫器的命令集及串行通訊協議
以LRP830讀寫器為例,LRP830是EMS 13.56MHz無源系列射頻讀寫器中的一種,它的標識和天線可以在水下或高溫腐蝕環境中正常工作,可以一次讀寫99個標識,最大讀寫距離63.5cm。它帶有兩個串口,一個DeviceNet接口,4個DI隔離輸入,4個DI隔離輸出,保護等級IP66,NEMA4封裝,非常適合于在工業自動化中應用。
LRP830讀寫器上的串口是合在一起的,通過專用電纜可以分接出COM1和COM2兩個串口,兩個串口作用不同,COM1用作通訊口,從PLC或PC接收命令并返回響應數據, 可以配置為RS232、RS422或DeviceNet接口。COM2用于配置系統參數(如讀寫模式、波特率等)或下載系統升級程序。
LRP830可以與所有EMS的FastTrackTM系列無源標識結合使用,每個標識中可以存儲48個字節的數據,另外還有8個字節用于存儲只讀的唯一的序列號(出廠前由廠方設定)。
LRP830提供了單標識讀寫命令集(見表1),多標識讀寫命令與此類似。
表1 單標識命令集

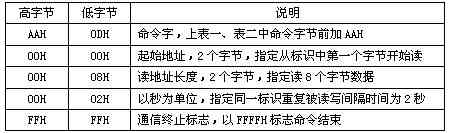
每種命令可以有三種通訊協議:ABxS 、ABxF 、ABx ASCII。表2 是ABxS通訊協議持續讀單標識命令的一個例子,其它命令與此類似。
表2 ABxS協議持續讀單標識命令舉例
3 RFID讀寫器與PLC串行通訊
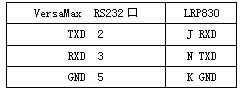
以EMS RFID讀寫器LRP830 與GE Fanuc VersaMax PLC的串行通訊為例。VersaMax PLC的RS232串口與LRP830的COM1接線對應關系見表3。
表3 VersaMax與LRP830讀寫器的串口接線對應關系
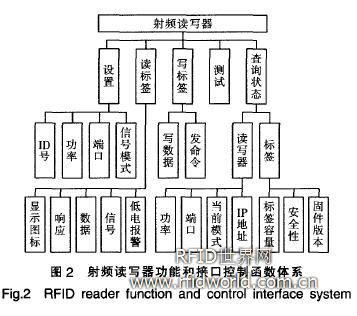
通過PLC控制RFID讀寫器讀寫標識數據的實現流程如圖2所示。
圖2 PLC讀寫RFID標識數據的程序結構框圖

以下是具體實現時要注意的技術細節:
1) LRP830與VersaMax PLC的串口相連時,信號線要錯線,即VersaMax RS232口的TXD/RXD要接LRP830 的COM1的RXD/TXD,LRP830與PC連接時則是直通的。
2) PLC使用串行I/O通訊協議與RFID讀寫器通訊。串口初始化、設置緩沖區、清除緩沖區、寫串口、讀串口狀態等操作都是先通過一組BLKMOV WORD指令給COMMREQ的數據塊賦值,然后執行COMMREQ指令完成的。例如,以下語句(見圖3)通過RFID讀寫器寫10個FF(46H)到標識中,從第一個字節寫起。
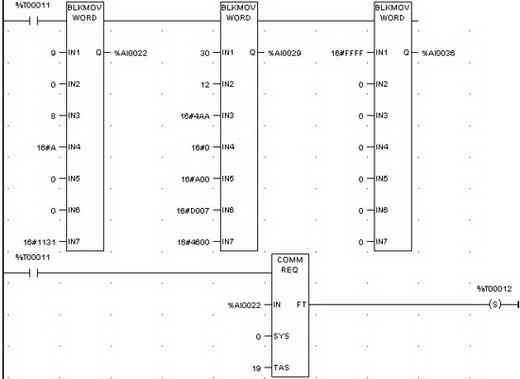
圖3 PLC與RFID讀寫器串行通訊例程
3) 要注意PLC寫標識數據只需要執行寫串口命令就可以了,而PLC讀標識數據的過程則包含兩步:一是PLC執行寫串口命令, 即寫讀標識命令到RFID讀寫器;二是PLC執行讀串口命令,捕捉RFID讀寫器返回的數據。這是由于RFID讀寫器在接到讀標識命令后,會返回讀命令的響應信息到串口緩沖區,其中包含了讀到的標識數據。
4) 使用ABxS協議時,要注意命令字的MSB和LSB的順序問題。RFID讀寫器與PLC通訊時,要將讀寫器指令的MSB和LSB顛倒一下,即LSB在前,MSB在后。例如圖3中,第二個BLKMOV WORD指令的第三個輸入IN3應為16#4AA,而非16#AA04。
5) 利用讀寫器指示燈的變化輔助PLC程序調試。LRP830讀寫器的面板上有兩排LED指示燈,其中,當“ANT”亮時,表示天線在執行讀寫操作;“COM1”亮時,表示串口1執行了寫命令,“RF”亮時,表示有標識被讀寫且仍在讀寫范圍內。
4 RFID讀寫器與PC串行通訊
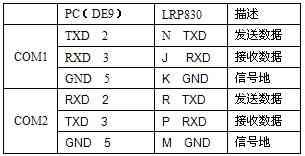
仍以EMS RFID讀寫器LRP830為例。與PC機相連時,LRP830的COM1/COM2與PC機的9針串口COM1/COM2的連接對應關系見表4。
表4 LRP830的串口與PC串口連接對應關系
在PC機上開發串口通訊程序,可以使用現有的通訊控件(如VB的Mscomm),也可以使用高級編程語言結合Windows API實現。本文用Delphi 6在Windows2000環境中,應用多線程技術實現了PC與RFID讀寫器間的串行通信。使用Delphi的優點是,Delphi對許多Windows底層API函數作了封裝,簡化了程序代碼。使用多線程的優點是,程序編寫比較靈活,而且串口監聽線程不影響主線程其它任務的執行。程序結構框圖見圖4。
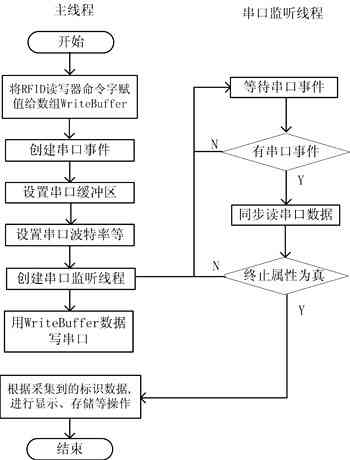
RFID
在具體實現上述思路時,要注意以下技術細節:
1) 根據RFID讀寫器通訊協議的特點,讀寫器每執行一個主機發來的指令,無論是讀標識還是寫標識,都會返回一定字節的響應數據,用以確認命令已執行或返回標識中存儲的數據。因此,主機讀或寫標識數據都需要先寫(串口命令)后讀(返回的串口數據)。
2) 為了使程序體現模塊化的設計思想,易于調試和維護,可以把各種RFID命令預先存入命令數組中,而把主機對RFID串口的命令和捕捉RFID讀寫器命令響應編制成單獨的子程序,在調用它之前,先調用命令字賦值子程序。
3) 對主線程的說明:在主線程中用CreateFile函數建立串口事件,設置緩沖區和通信參數,創建串口監聽線程。用WriteFile寫串口函數完成通過RFID讀寫器寫數據到標識中。部分程序如下:
……
hcom := CreateFile(pchar(Whichcom), GENERIC_WRITE or GENERIC_READ,
0, 0, OPEN_ALWAYS, FILE_ATTRIBUTE_NORMAL, 0); //產生串口事件
setupcomm(hcom,TOTALBYTES,TOTALBYTES); //設置緩沖區
getcommstate(hcom,lpdcb);
lpdcb.BaudRate:=BAUDRATE; //波特率
lpdcb.StopBits := STOPBIT; //停止位
lpdcb.ByteSize := BYTESIZE; //每字節有幾位
lpdcb.Parity :=PARITY; //奇偶校驗
setcommstate(hcom,lpdcb); //設置串口
Mycomm := Tcomm2.Create(False); //創建串口監聽線程
WriteFile(hcom, WriteBuffer,sizeof(WriteBuffer),lpBytesSent, 0);//寫標識命令
……
4) 對串口監聽線程的說明:
程序中用到的方法主要有Synchronize和Terminate。Synchronize是Delphi提供的一種安全調用線程的方法,它把線程的調用權交給了主線程,從而避免了線程間的沖突,這是一種最簡單的線程間同步的方法,可以省去用其它語言編程時需要調用的多個Windows API 函數,例如createEvent(創建同步事件),Waitforsingleobject(等待同步事件置位),resetevent(同步事件復位),PostMessage(向主線程發送消息)等。用Delphi編寫多線程通訊程序的優點是顯而易見的。例如以下語句即可實現串口監聽線程:
……
While (not Terminated) do //如果終止屬性不為真
Begin
dwEvtM ask:=0;
Wait := WaitCommEvent(hcom,dwevtmask,lpol); //等待串口事件
if Wait Then
begin
Synchronize(DataProcessing); //同步串口事件
end;
end;
上述程序一旦檢測到串口事件,就調用DataProcessing方法讀串口數據,并寫入數組,供程序其它部分調用,另外還要檢測何時退出線程,程序如下:
procedure Tmainform.DataProcessing
begin
clear := CLEARCOMMERROR(hcom,lperrors,@comms); //清除串口錯誤
if Clear Then
Begin //處理接收數據
ReadFile(hcom,ReadBuffer,Comms.cbInQue,LPReadNumber,0);
ReceBytes[I+ArrayOffset] := ReadBuffer[I];
//讀串口緩沖區數據并寫入數組
gameover := (ReceBytes[I+ArrayOffset-1]=Byte($FF))
and (ReceBytes[I+ArrayOffset]=Byte($FF)); //終止條件
if gameover then terminate; //退出線程
……
End;
End;
其中,Terminate將線程的Terminated屬性設置為True。線程一旦檢測到Terminated屬性為True,就會結束線程,去執行Onterminate事件,在Onterminate事件中對采集到的RFID標識數據進行處理。由于RFID讀寫器的ABxS協議的命令響應的最后兩個字節都是FF,所以可以將收到連續的兩個FF作為終止線程的條件之一。
程序應用舉例:
以持續讀標識中所有48字節數據命令為例,在程序中用WriteBuffer數組保存該命令,對WriteBuffer數組的各個元素賦值如下:
WriteBuffer[0] := Byte($AA); WriteBuffer[1] := Byte($0D); //連續讀標識命令字頭
WriteBuffer[2] := Byte($00); WriteBuffer[3] := Byte($00); //從第一個字節開始讀
WriteBuffer[4] := Byte($00); WriteBuffer[5] := Byte($30); //讀48個字節數據
WriteBuffer[6] := Byte($00); WriteBuffer[7] := Byte($02); //延時2秒
WriteBuffer[8] := Byte($ff); WriteBuffer[9] := Byte($ff); //連續讀標識命令字
執行持續讀標識命令后,程序以WriteBuffer數組寫串口,RFID讀寫器執行此命令,并返回響應數據(見圖5)。
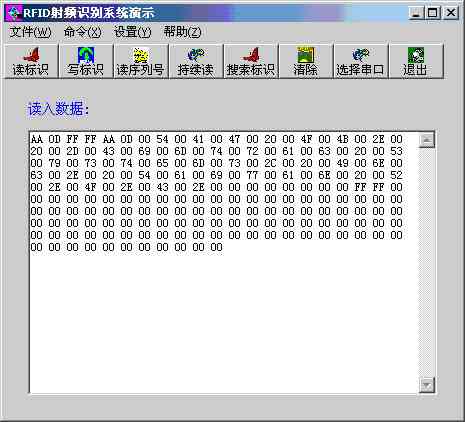
圖5 持續讀標識命令執行結果
從圖5窗口中可以看到,前4個字節AA OD FF FF就是LRP830讀寫器對持續讀命令的確認信息,然后是數據報文頭AA OD和標識中48個字節的數據(每字節數據前加00),最后是數據報文尾FF FF。
本文介紹了可編程控制器及微機與RFID射頻識別讀寫器進行串行通訊,從而獲取標識中的數據的具體實現方法:PLC通過串行I/O通訊協議與RFID讀寫器實現串行通訊,PC通過Windows多線程技術與RFID讀寫器實現串行通訊。本文所述方法具有通用性,對于其它廠家的PLC和RFID系統也有一定的參考價值。RFID射頻識別技術在我國工業自動化等領域的應用才剛剛開始,前景非常廣闊。本文對于促進該技術的推廣應用具有一定的積極意義。














 工商網監
工商網監
評論