 電子發燒友App
電子發燒友App


汽車電力載波總線系統的應用設計
汽車總線數據通信技術已得到了廣泛的應用。目前這些總線都需要采用專門的數據線束,這將增加汽車的制造成本和維護難度,并給汽車內的數據傳輸帶來不穩定的因素。汽車電力載波總線數據通信技術,在不增加汽車內的線束的基礎上實現汽車內ECU模塊間的數據傳輸和共享。本文就如何設計和實現該總線的關鍵技術進行了相關的研究。
關鍵詞 汽車電力載波 總線系統 調制 解調 跳頻
目前,現行的汽車總線標準很多,其中使用比較廣泛的有CAN總線、J1850等。這些總線都要采用專門的數據線束,且汽車的ECU單元對數據傳輸的要求不一致,需要在汽車內同時布置幾個不同的數據網絡。另外,這些數據總線的實現又需要布置專用的數據通信線束,這樣增加了汽車內的線束、制造成本和維護難度,給汽車內的數據傳輸帶來不穩定的因素。本文介紹一種新的汽車總線數據傳輸方式——汽車電力載波總線數據通信技術,該方式在不增加汽車內線束的基礎上可實現汽車內各ECU模塊之間的數據傳輸和共享。
1? 系統總線通信信道模型分析
與低壓電網載波通信系統一樣,汽車電力線載波系統的負載也是復雜和時變的。各種類型的電器有時接通,有時斷開,使得導線的阻抗特性具有很大的波動性,系統的傳遞函數隨負載的變化隨時發生改變,是一個時變系統。圖1所示的時變通信信道模型,可以用來表述汽車電力線載波總線系統。圖中,除了噪聲干擾被表示為加性的隨機干擾過程外,系統中其他的部分都以相應的頻率響應函數表示。通信系統中的傳遞函數以及噪聲模型可以通過測量得到,也可以通過理論分析得到。這個系統模型比較全面地概括了通信系統設計時所必須考慮的重要特性。

圖1? 汽車PLC系統時變通信信道模型
要進一步研究汽車電力線載波系統的特性,就要確定信道模型中傳輸特性的參數。本文使用美國Aglient公司生產的矢量網絡分析儀8712ES,其結構框圖如圖2所示。對于一個汽車系統,足夠地、精確地描述車載網絡的參數實際上是不可能的。這里采用實驗法研究其信道模型。實驗法是把系統看成一個黑箱,不需要精確知道箱內結構,只要通過實驗得到描述這個黑箱信號傳遞特性的傳遞函數就能表述這個系統。

圖2? 網絡分析儀結構框圖
對于汽車電力線載波通信信道,其頻率響應是一個緩慢變化的隨機過程。這個隨機過程可以看成是一個方差為σ2的白噪聲經過一個因果穩定濾波器的輸出。正確地選擇這個濾波器的系數,就能把這個隨機過程用有限的參數表示出來。把已經獲得的數據送入計算機處理、分析方差的變化開始變緩,可以確定系統頻率響應,用3個系數和1個白噪聲的方差表示為: 。根據模型系數的統計特性認為,通信信道的頻率響應應該是白噪聲隨機過程經過AR模型系數所構成的濾波器后的輸出,可以通過計算機編制程序來產生信道的頻率響應。這里假定系數都是獨立的高斯隨機變量,仿真結果如圖3所示。
。根據模型系數的統計特性認為,通信信道的頻率響應應該是白噪聲隨機過程經過AR模型系數所構成的濾波器后的輸出,可以通過計算機編制程序來產生信道的頻率響應。這里假定系數都是獨立的高斯隨機變量,仿真結果如圖3所示。

圖3? 汽車電力線載波通信信道響應仿真結果
本文在大量實驗測量的基礎上,在500 kHz~10 MHz頻帶上對汽車電力線載波通信信道的傳輸特性進行了研究,并用隨機信號處理方法建立了信道幅頻特性的3階自回歸模型,得到以下結論:
①? 汽車電力線載波通信信道不存在通常低壓電力線載波通信信道都會遇到的多孔徑傳輸的問題。
②? 汽車電力線載波通信信道具有時變性,在頻域內,該時變性只發生在5 MHz以下的頻率范圍內;在頻率高于5 MHz的頻率時,時變性不明顯。
2? 系統設計

圖4? 汽車載波通信的網絡拓撲結構原理框圖
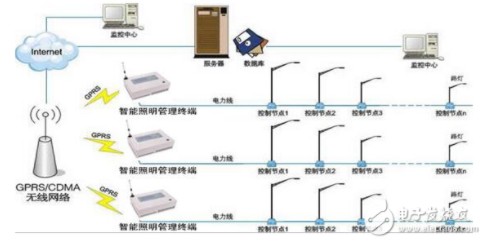
根據系統總線通信信道模型分析,汽車電力載波總線采用汽車載波通信標準和協議;同時,結合汽車內各電器對數據傳輸速率要求的實際情況,組建不同數據速率的汽車線束載波通信網絡。高速載波通信網絡將汽車內需要高數據傳輸速率的模塊連接在一起,而對速率要求不高的電器模塊則使用低速通信網絡。這樣,汽車內的所有電器就可以通過很少的幾根電力線束分別連接在一起,組成幾個子系統。這些子系統之間通過網間連接器(網關)實現信息共享,達到汽車各電器模塊的協同動作,實現汽車智能控制。圖4是汽車載波通信的網絡拓撲結構原理框圖。在這種拓撲結構的汽車載波通信系統中,各電器模塊與載波通信模塊之間的連接采用新的汽車載波通信總線標準。
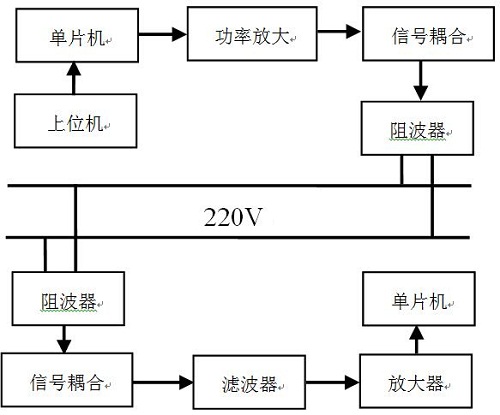
本設計中的汽車載波通信系統采用主從結構,整體的網絡結構呈樹狀分布。系統中包括一個主控制模塊和多個從控制模塊。從網絡拓撲結構的角度來看,整個通信系統就是由主控制模塊、汽車電力線束以及從控制模塊組成,在系統中汽車電力線束同時也起到了通信信道的作用。圖5顯示了連接在汽車內載波通信系統中的主控制模塊與電動門窗及電動椅等負載的連接情況。控制信息通過汽車電力線束,在各個控制模塊之間傳輸。

圖5? 汽車載波通信系統負載連接原理
3? 系統控制單元的實現
采用載波通信技術的智能汽車照明控制系統包括主控制模塊及從控制模塊。圖6為系統控制單元連接框圖。從圖中可以看出,除了外部接口外,主控模塊與從控模塊之間沒有太大的差別。它們都包括有CPU模塊、調制解調模塊、耦合模塊。這些都是進行載波通信所必需的單元。下面將詳細論述這幾部分模塊的具體實現。

圖6? 系統控制單元連接框圖
各個控制單元系統采用了PIC系列單片機,主控制單元采用的是PIC16F877,而從控制單元采用的則是PIC16F873。 PIC(Peripheral Interface Controller,外圍接口控制器),是由美國Microchip公司推出的單片機系列。
3.1? 主控制單元的具體實現
下面以主控制單元中CPU模塊的具體應用為主,介紹系統中CPU的具體實現。圖7所示為主控制單元CPU模塊的控制連接電路。
主控制模塊沒有具體的負載控制要求。根據功能的不同,它可以分為內部系統及外部系統兩部分。外部系統方面,主要起與系統外部進行信息交流的作用,包括人機接口及CAN總線模塊。通過該部分,系統可以接收由外部發送過來的命令,同時也能夠將本系統的各個單元模塊狀態信息發送給外部系統。內部系統方面,主控制單元的任務是將外部來的命令轉化為具體的控制內容,發送給系統內的各個從控制單元,以及接收各個從控制單元發送上來的狀態信息,并對整個系統的運行起管理控制作用。

圖7? 主控制單元CPU模塊控制連接電路
主控制模塊外部系統任務的實現是通過它與外部系統的接口來實現的。如圖6所示,系統擴展的CAN總線接口用于與汽車內的其他子系統的信息交流,以實現汽車內各子系統的信息共享,使它們能夠協同動作,實現汽車的智能控制。主控制模塊擴展的鍵盤模塊用于接收操作人員的控制命令。
總線系統內部信息的交流是通過載波耦合模塊來實現的。根據上述分析可知,系統的信號耦合模塊包含發送、接收兩個部分。將發送、接收耦合輸出分開,可以避免系統內部的信息傳輸混亂。
另外,主控制單元還擴展了一個系統狀態信息顯示模塊,該模塊通過一系列LED來顯示系統內各從控制單元的運行狀態。由于主控制單元的接口較多,所以采用了具有33個輸入/輸出引腳的作為主控制單元控制CPU。
對于各個從控制單元,由于它們不需要與系統外部的模塊進行信息交流,不需要有太多的外部接口,所以選用了具有較少21個輸入/輸出引腳的PIC16F873單片機作為從控制單元控制CPU,以節約成本。從控制單元包括CPU模塊、載波通信模塊以及控制負載的電力電子模塊。
3.2? FSK調制、解調的實現
在載波通信系統中,從CPU模塊出來的信號是經過編碼處理的二進制數據序列。本系統采用的信號調制、解調過程分為兩層,即FSK調制解調以及擴頻調制解調。
本系統中,FSK調制策略的實現是通過使用兩個集成芯片來完成的: 一個作為調制芯片,另一個作為解調芯片。系統的FSK調制是通過使用壓控晶振(VCO)芯片實現的。該芯片產生一個正弦波,其輸出信號的頻率與加到該芯片的直流電壓成正比。通過改變VCO芯片的給定電壓,就可以改變其輸出交流信號波形的頻率,然后利用這個交流正弦波進行FSK調制。具體電路如圖8所示。從圖中可以看出,系統采用了信號發生器芯片XR2206。該芯片是一個多用途電壓控制晶振器,特別適用于FSK信號調制。芯片只需要很少的外圍器件就能夠正常工作。芯片引腳7及引腳8處的電阻與引腳6處的電容一起決定了設備在邏輯"1”及邏輯“0”處的信號頻率。引腳3處的分壓電路用來對芯片的輸出正弦信號進行整形。(引腳3及引腳6處的外接電路圖中未畫出。)

圖8??FSK信號調制電路
FSK信號的解調是通過一個鎖相環集成芯片來實現的。該鎖相環使得輸入信號波形保持頻率鎖定。當輸入信號波形的頻率改變時,鎖相環將產生一個錯誤標志信號,促使鎖相環改變鎖定頻率,以重新匹配輸入信號的頻率。通過仔細地調節芯片電路,使得鎖定頻率與邏輯“1”及邏輯“0”兩個頻率的中間頻率相一致。具體的解調電路如圖9所示。由圖可見,系統是通過芯片RC2211N來進行FSK解調操作的。根據上面的分析,該芯片是基于一個鎖相環拓撲原理工作的。電路中重要的外部元件包括引腳8及引腳13的外接元件。這些元件的參數設置了鎖相環的中間頻率、衰減系數及增益。根據系統的設計,信號經過FSK調制后,將被發送到跳頻擴頻調制模塊以對信號進行跳頻擴頻調制。

圖9? 信號FSK解調電路
3.3? 跳頻擴頻信號調制、解調的實現
結合汽車內的電磁環境及汽車電力線束載波信道特性,系統采用了跳頻擴頻調制方式。跳頻擴頻系統不論慢跳還是快跳,一般輸入調制信號是已調制數字信號s(t),其載波一般采用中頻波段,然后進入跳頻系統的“變頻器”(乘法器),與受控于PN碼的“頻率合成器”所提供的隨機改變其頻率值的另一射頻,作為載波與之相“混頻”后,由帶通濾波器輸出發送信號,構成擴頻調制系統發送模塊。而在接收端,進行與此相反的一個過程。信號調制是用來提高在強干擾條件下基本通信系統的性能的,使得系統能夠識別并且避免有強干擾存在的頻段。

圖10? 跳頻擴頻信號調制電路
跳頻擴頻信號調制是使用集成芯片來實現的,如圖10所示。具體的流程: 壓控芯片MAX8038提供的高頻擴頻載波信號被發送到集成芯片MC1496,由該芯片完成載波信號與FSK調制信號的幅度調制操作。芯片MC1496是一種乘法器,它工作在抑制載波幅值調制模式。在抑制載波幅度調制模式下,載波頻率沒有被傳輸,這樣就能夠得到更大的傳輸效率。高頻載波信號產生芯片MAX8038是一種壓控信號發生器,信號的頻率為10 kHz~ 20 MHz。跳頻擴頻信號的解調原理與調制過程是相似的,調制后的高頻擴頻信號被發送到MC 14%乘法器芯片,與前面過程同頻的載波信號相乘進行幅度解調操作,就可以得到跳頻擴頻信號的解調信號。
4? 總線系統通信性能測試
為了對系統的性能進行評估,實驗測試了系統在不同的數據傳輸速率下的各個控制端口接收、發送的數據傳輸誤碼率情況。
實驗測試是以在某個固定數據傳輸速率下,先測試主控制單元,后測試每個從控制單元的順序進行的。實驗可以通過編程設置相應按鈕的功能來實現測試的要求,比如,如果需要測試主控制單元發送信號時,各從控制單元接收信號的誤碼率,可以直接按下事先設置好的按鈕,使系統中的主控制單元進行發送數據狀態,直到該控制按鈕被再次按下時為止。實驗發送的數據被設置為從00H到FFH的循環,這樣在接收端通過接收到的數據值與事先設置好的值比較,就可以知道數據發送的正確與否。如果接收到的數據與事先設置的數據不相等,則錯誤次數統計數將加1。在實驗中,設置每次發送的字節數為5 000次,這樣能夠較準確地評估系統的性能,排除一些偶然的因素。具體的實驗數據如表1所列。
表1? 實驗數據
實驗表明,在汽車內利用汽車線束進行電力線束載波通信是可行的。該技術能夠在減少汽車內使用的線束的基礎上,提高汽車的智能化水平。電力線束載波技術在汽車內的數據傳輸方面有很大的應用前景。












 工商網監
工商網監
評論