 電子發(fā)燒友App
電子發(fā)燒友App


基于雜波協(xié)方差矩陣特征向量分析STAP降維方法
本文在對雜波協(xié)方差矩陣的特征值、陣特征向量做出分析的基礎(chǔ)上,討論了無信噪比損失的降維的充要條件,并給出了一種滿足該條件的降維變換陣的構(gòu)造方法.最后基于一組Mountaintop數(shù)據(jù)對文中提出的算法作出了驗(yàn)證.
關(guān)鍵詞:機(jī)載雷達(dá);時空二維自適應(yīng)信號處理;雜波抑制
Rank-Reduced STAP Based on Eigen-Decomposition of the Covariance Matrix
LUO Yi,LIU Guo-sui,SU Wei-min
(Institute of Photo and Electronics,Nanjing University of Science and Technology,Nanjing 210094,China)
Abstract:The selection of the transform matrix has an effect on the output signal to interference plus noise ratio.It can achieve its upper bound when transform matrix is selected in a special form.So,a new kind of rank-reduced STAP is proposed.When covariance matrix is known,it is the same as the full dimension optimal STAP.When covariance matrix is unknown,it also has a good appearance.
Key words:AEW radar;STAP;interference suppression
一、引 言
七十年代初Reed、Mallett和Brennan提出了時空二維自適應(yīng)信號處理中的樣本協(xié)方差矩陣求逆算法(SMI)[1],并對該方法的性能做了理論分析.受實(shí)際條件限制,上述算法不可能直接用于相干脈沖處理間隔(CPI)內(nèi)的全維時空快拍,對實(shí)際應(yīng)用更有意義的是降維STAP算法.目前較為常用的降維措施無外乎兩類.第一類是以R.Klemm提出的輔助通道法[2],保錚教授等人提出的mDT-SAP[3],和Hong.W提出的JDL-STAP[4]為典型,在雜波譜圖上直接選出時空波束(一般為二維可分離付氏基)進(jìn)行降維的方法.這類方法直觀且較為可靠.第二類方法是基于雜波協(xié)方差矩陣特征值的大小選取相應(yīng)的降維波束.這兩種降維措施在實(shí)際應(yīng)用中往往是脫節(jié)的.
二、信號模型與最優(yōu)自適應(yīng)權(quán)
設(shè)一均勻線陣有L陣元,其在某一被檢測距離環(huán)上得到的時空快拍為X=(XT1,XT2,…,XTL)T,其中Xi=(X1i,X2i,…,XMi)T,i=1,2,…,L是第i陣元上接收到的M個脈沖構(gòu)成的向量,上標(biāo)‘T’表示矩陣或向量的轉(zhuǎn)置.X可以分為以下兩部分X=S+N.其中S是目標(biāo),N是由地(海)雜波、接收機(jī)噪聲及有源干擾構(gòu)成的.此時雜波協(xié)方差矩陣R=COV(N,N),考慮到接收機(jī)噪聲的存在性,可以認(rèn)為雜波協(xié)方差矩陣R是正定的.在輸出信雜噪比最大的準(zhǔn)則下,最優(yōu)權(quán)Wopt=kR-1S,最優(yōu)輸出信雜噪比SINRopt=SHR-1S,k為一常數(shù).雜波協(xié)方差矩陣還可以表示為R=UΛUH,U=(U1,U2,…,ULM),Λ=diag(λ1,λ2,…,λLM),其中U1,U2,…,ULM是R的標(biāo)準(zhǔn)化特征向量,λ1,λ2,…,λLM是相應(yīng)的特征根.此時,最優(yōu)權(quán)及最優(yōu)輸出信雜噪比可分別表示為
![]() (1)
(1)
其中,上標(biāo)‘H’表示矩陣或向量的共軛轉(zhuǎn)置.把U1,U2,…,ULM看做是彼此正交的信號通道,則λ1,λ2,…,λLM是各通道中噪聲功率,而SINRopt是各通道中信雜噪比之和.
三、基于雜波協(xié)方差矩陣特征分解的降維STAP
設(shè)B是一個LM×K的列滿秩降維變換矩陣,Z=BHX,變換后雜波協(xié)方差矩陣為RD=E(ZZH)=BHRB.當(dāng)降維變換后的權(quán)W=k(BHRB)-1BHS(其中k為常數(shù)),Z中相應(yīng)的最大輸出信雜噪比為SHB(BHRB)-1BHS.現(xiàn)在有這樣幾個問題:1.SHB(BHRB)-1BHS與SHR-1S誰大誰小?2.它們兩者可否相等?3.在什么條件下它們兩者相等?
對于確定的K,B,易證RD=BHRB是K×K正定Hermitian陣.設(shè)γi、Vi,i=1,2,…,K是RD的特征根及相應(yīng)的歸一化的特征向量.則RD=BHRB=VΓVH,其中Γ=diag(γ1,γ2,…,γK),V(V1,V2,…,VK).
進(jìn)一步,RD=VΓVH=BHRB=BHUΛ1/2Λ1/2UHB.從而有Γ-1/2VHBHUΛ1/2Λ1/2UHBVΓ-1/2=IK×K.令Δ=Γ-1/2VHBHUΛ1/2,則ΔΔH=IK×K.此時SHB(BHRB)-1BHS=SHBVΓ-1/2Γ-1/2VHBHS=SHUΛ-1/2ΔHΔΛ-1/2UHS.
值得注意的是Λ-1/2UHS=(λ-1/21UH1S,λ-1/22UH2S,…,λ-1/2LMUHLMS)T.則
SHB(BHRB)-1BHS=(λ-1/21SHU1,λ-1/22SHU2,…,λ-1/2LMSHULM)ΔHΔ(λ-1/21UH1S,λ-1/22UH2S,…,λ-1/2LMUHLMS)T (2)
由于ΔHΔΔHΔ=ΔHΔ,可見ΔHΔ是冪等的.因而,當(dāng)且僅當(dāng)Λ-1/2UHS屬于ΔHΔ的象空間,即Λ-1/2UHS∈Im(ΔHΔ)時
SHB(BHRB)-1BHS=SHR-1S=∑LMi=1λ-1i|UHiS|2 (3)
反之,SHB(BHRB)-1BHS<SHR-1S.
上式表達(dá)的是這樣一個事實(shí),對于任意的線性降維變換,降維后所能得到的最大信雜噪比不大于SINRopt.下面給出一種使Λ-1/2UHS∈Im(ΔHΔ)的降維變換矩陣B的選取方法
定理:設(shè)|SHU1|2,|SHU2|2,|SHUK-1|2,…,∑LMi=Kλ-1i|UHiS|2>0.對任意的正數(shù)K(1![]() K
K![]() LM),當(dāng)
LM),當(dāng)
![]() (4)
(4)
時,V=Λ-1/2UHS∈Im(ΔHΔ).其中O1是(K-1)×1零矩陣,O2是(LM-K+1)×(K-1)零矩陣,
D1=diag(λ-11UH1S,λ-12UH2S,…,λ-1K-1UHK-1S),
D2=(λ-1KUHKS,λ-1K+1UHK+1S,…,λ-1LMUHLMS)T (5)
證明:v∈Im(ΔHΔ)當(dāng)且僅當(dāng) (B(BHRB)-1BH-R-1)S=O. (6)
事實(shí)上,如果(B(BHRB)-1BH-R-1)S=O,則SHB(BHRB)-1BHS=SHR-1S.若v∈Im(ΔHΔ),則ΔHΔv=v.于是
UΛ-1/2ΔHΔΛ-1/2UHS=UΛ-1/2Λ-1/2UHS,既(B(BHRB)-1BH-R-1)S=O.由于
 (7)
(7)
其中Λ1=diag(λ1,λ2,…,λK-1),Λ2=diag(λK,λK+1,…,λLM),則
 (8)
(8)
其中(P1,P2)T=UHS,且P1=(UH1S,…,UHK-1S)T,P2=(UHKS,…,UHLMS)T.由于D2=Λ-12P2,則
 (9)
(9)
注釋:從證明的過程中可以看出,降維變換矩陣B具有更為一般的形式.設(shè)
∑m1i=1λ-1i|UHiS|2>0,∑m2i=m1+1λ-1i|UHiS|2>0,…,∑LMi=mK-1+1λ-1i|UHiS|2>0,B=U(diag(D1,D2,…,DK)),
其中
D1=(λ-11UH1S,λ-12UH2S,…,λ-1mUHmS)T,
D2=(λ-1m1+1UHm1+1S,λ-1m1+2UHm1+2S,…,λ-1m2UHm2S)T,…,
DK=(λ-1mK-1+1UHmK-1+1S,λ-1mK-1+2UHmK-1+2S,…,λ-1LMUHLMS)T, (10)
則v∈Im(ΔHΔ).
從降維變換矩陣B的構(gòu)造可以看出,B是根據(jù)各Ui(i=1,2,…,LM)通道中信雜噪比的大小對Ui做線性組合后得到的,其降維變換本身就是雜波抑制的過程.
再者,降維后的系統(tǒng)自由度K可取1到LM之間任意的整數(shù).當(dāng)K=1時,B=Wopt.
四、雜波協(xié)方差矩陣未知時降維自適應(yīng)雜波抑制
設(shè)X是被檢測距離門上的時空快拍(基本數(shù)據(jù)),X1,X2,…,Xm是與被檢測距離門相鄰的若干個距離門上的時空快拍(二次數(shù)據(jù)),則=(1/m)∑mi=1XiXHi是雜波協(xié)方差矩陣的極大似然估計(jì),k-1S是全維SMI最優(yōu)權(quán)的估計(jì).為達(dá)到實(shí)時處理,可采用以下兩種降維STAP算法.
(1)先利用雜波模型,根據(jù)雷達(dá)天線的發(fā)射方向圖、主波束方位角及載機(jī)速度等參數(shù)計(jì)算出理想雜波協(xié)方差矩陣R′.再對R′做特征分解,并把結(jié)果帶入式(4)得到降維變換矩陣B.將B作用于基本數(shù)據(jù)、二次數(shù)據(jù),并在此基礎(chǔ)上做自適應(yīng)處理.
(2)設(shè)Z1,Z2,…,ZQ為雷達(dá)掃描在同一方位上前數(shù)個CPI中與被檢測距離門相鄰的若干個距離門上的時空快拍(在此稱為輔助數(shù)據(jù)).一定條件下可假設(shè),Z1,Z2,…,ZQ與X1,X2,…,Xm相互獨(dú)立,且Zi、Xj具有相同的分布.設(shè)1=(1/Q)∑Qi=1ZiZHi,則1也是雜波協(xié)方差矩陣的極大似然估計(jì).對1做特征分解,并把結(jié)果帶入式(4)得到降維變化矩陣B.將B作用于基本數(shù)據(jù)、二次數(shù)據(jù),并在此基礎(chǔ)上做自適應(yīng)處理.
構(gòu)造上述兩種降維變換矩陣B的關(guān)鍵是通過一定的先驗(yàn)知識獲取對雜波協(xié)方差矩陣的估計(jì).盡管仍需做全維的雜波協(xié)方差矩陣特征分解,但是這樣做可爭取到實(shí)時處理中的處理時間.分析表明,如以代替1做上述第(2)種降維自適應(yīng)處理,其不僅在運(yùn)算量上與全維SMI的相當(dāng),它們在性能上也是一致的[5].
五、實(shí)測數(shù)據(jù)中的驗(yàn)證
下面以Mountaintop data t38pre01v1為例驗(yàn)證上述算法.Mountaintop實(shí)驗(yàn)中,天線是由14列陣元構(gòu)成的等效均勻線陣.波束寬度為26°(半功率點(diǎn)).每個CPI有16個脈沖.等效平臺運(yùn)動速度為94m/s.載波波長為0.6897m,在152公里(約在140號距離門前后)處有一目標(biāo).本文以十四個陣元的Chebyshev加權(quán)線陣做發(fā)射陣計(jì)算理想雜波協(xié)方差矩陣.降維過程中取K=30.
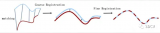
圖1中所示為對403個距離門做全維自適應(yīng)匹配濾波得到的信噪比輸出(-30dB對角加載).圖2中所示為對403個距離門做降維自適應(yīng)匹配濾波得到的信噪比輸出.計(jì)算中還發(fā)現(xiàn)前一算法對對角加載很敏感,而后者對對角加載不敏感.也就是說后者的降維波束很穩(wěn)定.
|
圖1 |
|
圖2 六、結(jié) 論 |












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論