 電子發燒友App
電子發燒友App


引言
目前,國內交通信號燈普遍采用定周期程控技術,即主要靠經驗和以往統計數據確定紅綠燈亮滅時間。要實現道路交通的智能化,就要引入變周期交通信號燈控制技術,實時檢測路口的交通流量以及擁塞量等數據,根據規則動態地調節信號燈,獲得更加滿意的通行率。
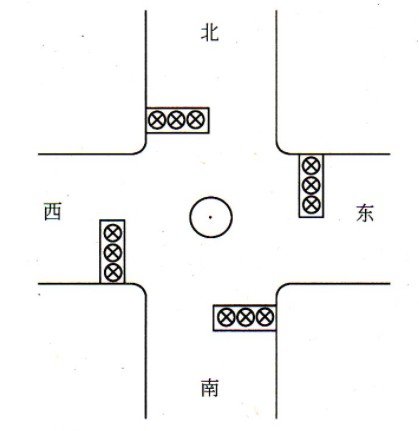
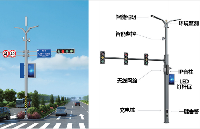
普遍交通信號燈
本文提出了一種具有分布式特征的交通信號燈控制系統設計方案,它利用RFID技術提高路況信息的收集精度, 利用電流環遠距離傳輸方式,并且應用人工智能理論使得系統具有更強的自適應性和可擴充性。
1? 系統功能與整體結構設計
從功能特點來看,智能交通信號燈系統應具有時間固定模式、時間設定模式、時間感應模式、現場遙控模式、遠程控制模式等信號控制模式;可以進行日期、時間設定、分時段時間設定、感應參數設定、周期時間、相位差和綠信比等參數設定;可以進行系統自檢、綠沖突檢測、燈故障檢測、線路故障檢測;具有強大的輸入/輸出功能,可實現對路口的不同相位燈控輸出和檢測功能。此外,系統提供友好的人機界面,用戶可通過手動開關、鍵盤或遙控器對信號機進行設定和控制。
信號機是整個系統的核心。它由LCD屏、控制板、燈組驅動板、開關電源、按鈕板等共5種功能模塊插件板,以及配電板、接線端子排等組成。本系統選擇基于ARM核的32位嵌入式RISC處理器AT91RM9200作為信號機控制板處理器,可以滿足信號機智能化的要求,使信號機在系統中成為收集與處理交通流量數據、通信聯網以及區域協調控制的平臺。
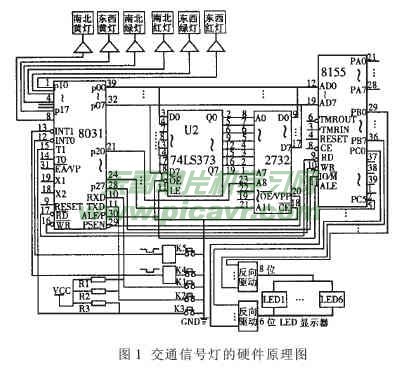
智能交通信號燈系統結構圖如圖1所示。
?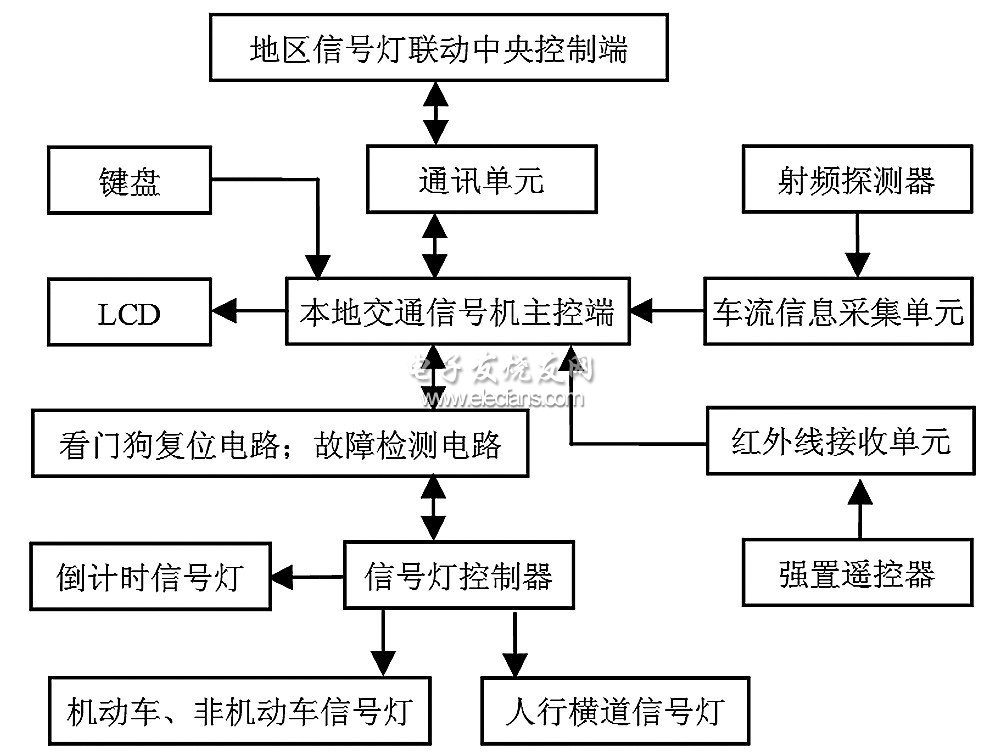
圖1 交通信號燈系統結構圖
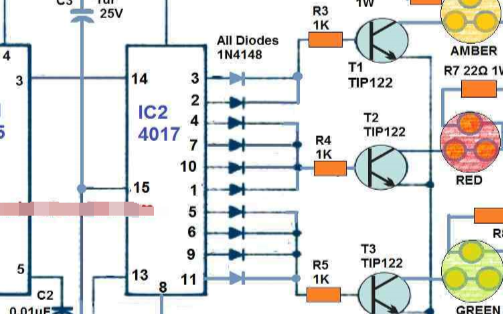
信號燈采用發光二極管,即LED技術,發光功率大,抗震能力強,省電又穩定。系統內各組件,包括信號燈都由外部供電,并配有UPS。信號燈控制器對各種信號燈不提供工作電壓,僅進行信號傳遞,完全實現弱電控制。信號燈亮度的控制采用脈寬調制的原理,將電壓全波整流,經電阻分壓,由光耦將其轉成有一定占空比的方波,當電源電壓升高時,占空比會減小,抑制LED亮度的提高,當電源電壓降低時,占空比會增大,限制LED亮度的降低,從而實現了LED亮度的自動控制。
信號燈遠距離通信控制可以采用電流環信號傳輸方式加以實現。這種遠距離通信控制電路簡單、成本低、抗干擾能力強。它是由電流環傳輸串行移位的3種信號--數據D、時鐘CLK、鎖存STR,交通燈則將控制器發來的串行信息轉換為并行輸出,準確實現位控制,不同的信號燈就可以在連線上采取并聯方式,這樣,一個線路輸出的負載能力足以控制十幾個信號燈,可以滿足各種交通路口的需要。
智能交通信號燈系統既是一個獨立的系統,又是整個地區智能信號燈系統的一部分。通過信息共享,可以實現交通信號的聯動控制,進行有效的交通預測和疏導。當路口車流相對均勻穩定時,地區內的信號燈協調運作,可以實現“綠波帶”控制。
以下給出地區交通信號燈聯動系統結構圖,如圖2所示。
?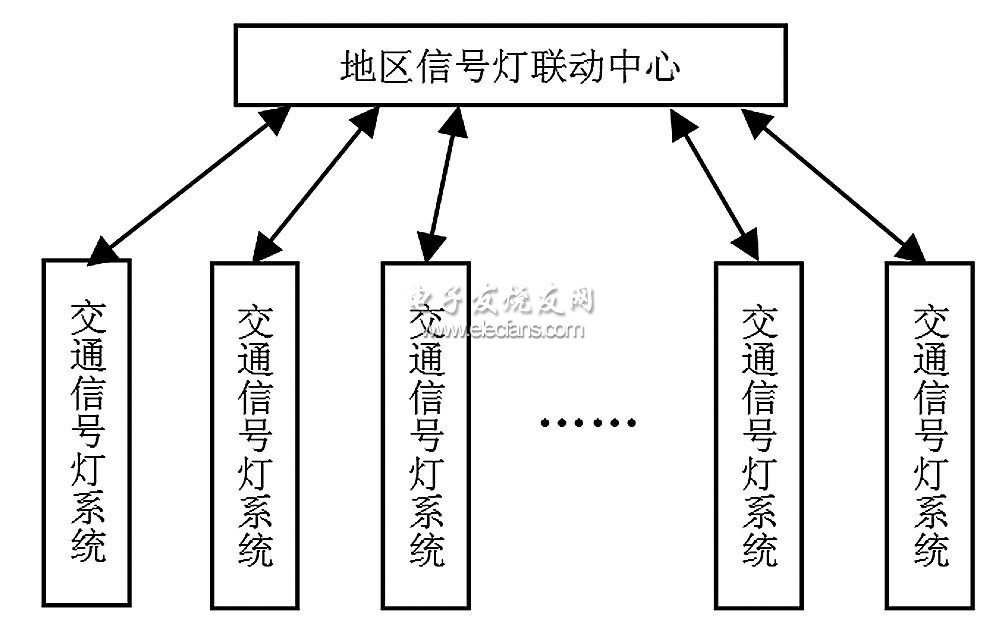
圖2 地區交通信號燈聯動系統結構圖
2? 系統硬件設計
2.1 信號機主控端模塊
主控制機采用處理器AT91RM9200,它是基于ARM的ARM920T內核,集成了豐富的外圍功能模塊,非常適合于實時控制,且支持實時操作系統,運算速度高。
信號機采用12/5V電源供電,AT91RM9200工作于3.3V和2.5V,系統內其它器件選擇工作電壓為3.3V和5V。
信號機在系統內部通訊和區域協調控制中需要時間同步,因此設計RTC(實時時鐘)用來對時。AT91RM9200內部集成RTC單元,只需要外接晶振就能工作,十分方便。
信號機主控端需要存放引導程序、嵌入式操作系統及其文件系統和應用程序,還有其它在運行過程中需要保存的數據,所以要通過外存儲單元來擴展存儲空間,包括SDRAM、NorFlash和NandFlash。NorFlash主要用于存放引導程序Bootloader和操作系統linux內核鏡像,系統上電或復位后從FlashROM中運行Bootloader,由Bootloader初始化硬件并將linux拷貝到SDRAM中運行。
NandFlash主要用于存放應用程序和數據。
為方便人機界面的操作,AT91RM9200內置LCD(液晶顯示器)驅動控制器,能自動產生LCD驅動控制信號,可以與LCD直接連接。鍵盤模塊通過ZLG7290B擴展一個4×4的鍵盤矩陣,ZLG7290B通過IIC串行總線與處理器進行連接。
考慮到信號機的體積,也為了方便設備的升級、擴展,從信號機控制板引出數據總線、地址總線和必要的控制信號,設計統一的系統總線,通過總線來調度控制各個功能板塊,如車流信息采集板塊、信號燈控制器板塊、紅外線接收板塊、故障檢測板塊等。這些板塊與相應的功能模塊一一對應,以插槽接口與信號機控制板相連。
2.2 車流量信息采集模塊
射頻識別,即RFID(Radio Frequency IDentification ),俗稱電子標簽,它是一種非接觸式的自動識別技術,通過射頻信號自動識別目標對象并獲取相關數據,工作過程無需人工干預,可應用于各種惡劣環境。一套RFID設備包括射頻標簽,天線和讀寫器三個部分。天線和讀寫器安置在路邊,當帶有射頻標簽的車輛通過該路段時,讀寫器會通過天線接收返回載有RFID信息的射頻調制信號,經處理后傳給信號機主控端,完成路況數據的信息采集。有關數據也經由本地信號機向上位機--地區信號燈系統控制端發送。車流信息在信號機主控端內經過建模計算,可以獲得當前信號燈所需的周期時間。
2.3 緊急干預模塊
在系統中加載遙控電路,以支持用紅外遙控器作緊急干預。采用8通道紅外發射/接收專用集成電路BA5104/BA5204,它能發射6個持續信號2個單次信號,串行口接入方便,且價格低,穩定性強。紅外接收端與信號機控制板總線相連,可以將遙控器按鍵信號傳遞至信號機主控端進行中斷處理,且優先級最高。
2.4 故障檢測模塊
交通信號燈工作環境較為復雜,可能存在各種難以預測的電源、電磁干擾及信號機自身的隨機性障礙。為了保證系統的可靠運行,除了采用軟件對策外,專門引入了硬件看門狗復位電路MAX708CPA ,該器件具有μP復位、掉電監測、手動復位等功能,可以起到較好的保護作用。此外,利用含有電壓檢測與電流檢測的故障檢測電路,對信號燈控制器和信號燈作出實時檢測,將返回的TTL電平信號傳遞至信號機主控板,信號機系統可以根據不同的結果選擇繼續執行,或者向上報警,甚至自行關機。
2.5 信號燈控制器模塊
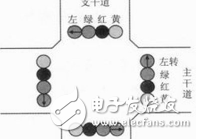
信號燈控制器是信號機與信號燈之間必需的硬件連接。路口信號燈的各種燈色狀態是由信號燈控制器對信號機數據進行處理轉化而成的。
2.6 地區聯動模塊
本地信號燈系統與地區信號燈系統管理端采用局域網絡(LAN)進行雙向通訊。本地信號機控制端將待處理的數據信息通過Web Service應用程序接口封裝好發給地區信號燈系統控制端,處理工作由后者完成,再把最終結果返回給本地信號機。Web Service技術充分利用地區信號燈系統控制單元的計算能力,減輕了本地信號機的處理器開銷,使得信號燈系統更加穩定和易于維護。
3? 軟件實現
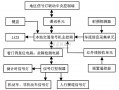
主程序流程圖如圖3所示。
?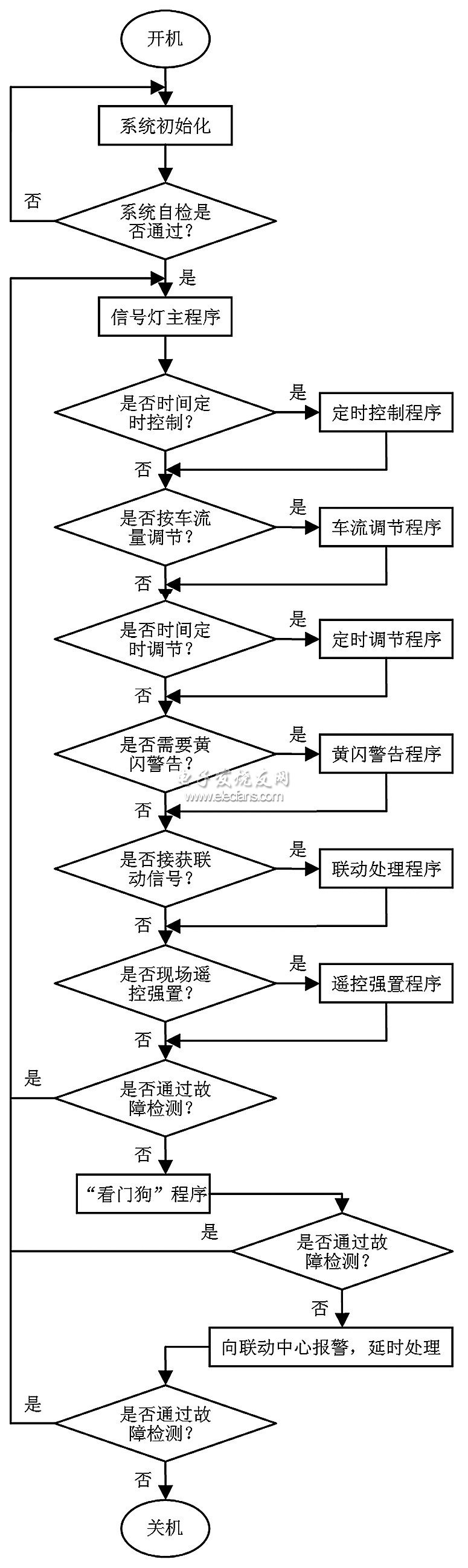
圖3 主程序流程圖
交通信號燈系統程序可分為以下幾個模塊:
信號機主程序模塊是整個系統的主要模塊,它按優先級利用其它模塊的執行結果,生成當前信號燈周期。
定時控制程序模塊支持通過鍵盤輸入固定的時間數值,改變當前所執行的信號燈周期,以人工經驗與系統相結合,體現出人機交互能力。
車流調節程序模塊是利用RFID技術識別交通路口附近的車流量,經由GA(遺傳算法)并引入模糊邏輯理論[6],對路口交通情況進行實時分析計算,依據結果對信號燈周期進行調整。本系統中,此模塊也是最能體現智能化的部分。此外,通過RFID技術的擴展技術,即車輛自動識別管理(AVIM) 系統,把車流信息與車輛信息監控管理中心連接起來,就可構成車輛信息管理平臺。
定時調節程序模塊是針對已經形成一定路況規律的路段而設置的。可以一次性預先設定每天不同時段對應不同的信號燈周期。比如,晚上車流量較少,可做定時調節將紅綠燈改成閃爍的黃燈,當第二天指定時刻到來時,自動恢復紅綠燈。
黃閃警告程序模塊可以立刻中斷所有的紅綠燈,全部改成閃爍黃燈。主要是在車流量很小的時段使用,可以提高通行效率。
遙控強置程序模塊是為交警現場指揮交通而設計的,只需用遙控器對紅外接收端按下特定的按鈕,就可以對現場的信號燈相位全部強制重置,特別適用于單向塞車車流的調節和像救護車救火車這樣需要無障礙通行的交通工具快速通過路口。
聯動處理程序模塊是用來處理上位機(交警聯動中心控制機)所發來的指令。信號燈聯網以后,整個區域的交通路口就可以進行協調聯動控制,如果一個路口發生擁堵,聯動中心可以發來指令,適當延長相鄰路口信號燈來車方向的通行時間,有效疏導交通。
“看門狗”程序模塊在主程序運行異常時可產生的一個溢出信號,并通過引腳向處理器發送復位信號,使主程序重新開始運行。
系統檢測及報警程序模塊是應對信號燈故障而設置的,它根據返回的TTL電平信號作出判斷,一旦發現問題,將把出錯信息實時向上反映,為進一步的系統維護提供依據。
4? 結論
研制智能型交通信號燈系統,可以有效改善交通現狀,提高現有道路資源的利用率,節約社會成本。本系統基于AT91RM9200處理器,以應用為中心,采用嵌入式操作系統,設計上具有成本低,操作簡易,擴展方便,信息共享度高,靈活性強等特點,有很好的參考價值和較高的實用價值。













 工商網監
工商網監
評論