 電子發燒友App
電子發燒友App


基于GSM、GPS及CAN總線的列車行程測量系統
引言
隨著鐵路運輸向高速度、高密度方向發展,安全工作將更加重要。一旦發生事故,不僅中斷行車、打亂正常運行秩序,在經濟上造成嚴重的損失,而且還會在社會上產生不良影響。為保證列車快速、安全、舒適、高效地在高速線上運行,對鐵路列車進行及時的檢修是非常重要的。列車檢修周期主要以列車行駛的里程為參考,所以及時準確地記錄列車的行駛里程是保證列車安全運行的關鍵。以往對列車各車廂行駛里程的記錄是采用人工記錄計算機存儲的方式,有時由于工作人員的疏忽,就可能造成記錄表丟失或漏記現象,這樣就會使列車的實際行駛里程與記錄的行駛里程不符,從而使列車不能得到及時地檢修,為列車的安全運行造成了隱患。因此,研制一個能夠自動記錄列車行駛里程的網絡系統是至關重要的。
本系統就是為了滿足上述要求而開發的,它是利用美國GPS(Global Positioning System)全球定位系統,結合CAN(Controller Area Network)總線技術和GSM(Global System for Mobile Communication)移動通信技術的產物。其主要功能是依靠GPS來定位列車的位置,通過單片機來累計列車的行駛里程,利用CAN總線在列車各個車廂間建立局域網,通過GSM網絡將列車各車廂的行駛里程數據傳送回監控中心,并由監控中心進行統一的監控和管理。本系統采用GSM短消息進行數據傳輸, 它不需要建立撥號連接,只需把要發的信息加上目的地址發送到短消息中心,再由短消息中心轉發到最終目標。短消息每次限制在160個字節以內,這對傳送列車行駛里程數據已足夠。本系統利用GSM短消息業務進行數據傳輸,最大的優點就在于連接簡單、費用低廉、覆蓋面廣,實現方便。
系統的組成
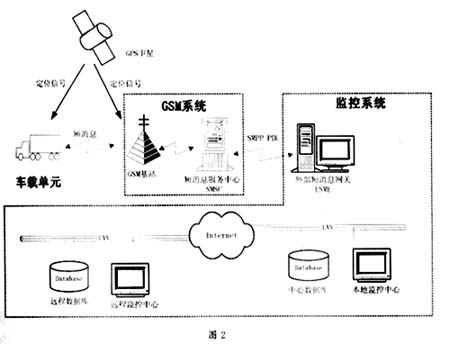
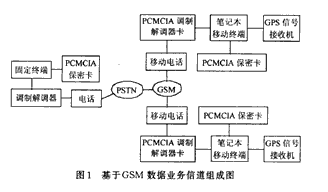
系統由GPS衛星、車載終端、GSM公眾網和監控中心組成,其系統原理圖如圖1所示。
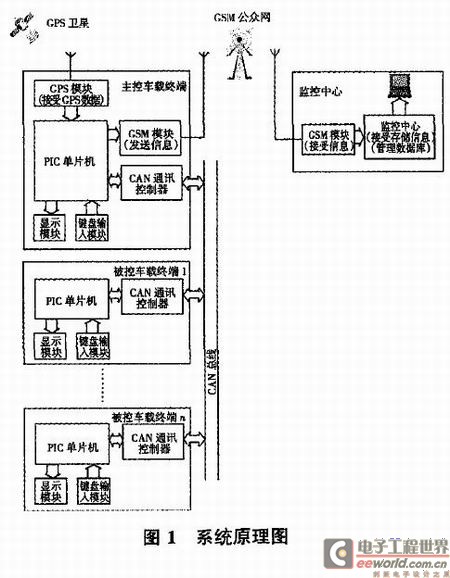
GPS 衛星不間斷發送導行電文,由車載終端上的GPS接收機接受,并進行解碼處理,進而輸出定位數據。車載終端包括主控車載終端和被控車載終端。主控車載終端安裝于火車頭,它由GPS接收模塊、信息處理和控制模塊、GSM通信模塊、鍵盤輸入模塊、顯示模塊和CAN總線通訊控制模塊組成,負責GPS信息的接受、數據的處理、CAN總線的通訊控制、GSM信息的發送等;被控車載終端安裝于各車廂,它由信息處理和控制模塊、CAN總線通訊模塊、鍵盤輸入及顯示模塊組成,負責本節車廂行駛里程的累計以及與主控車載終端的通訊等。主控車載終端與被控車載終端通過CAN總線相連形成局域網。車載終端通過GSM網絡用短消息方式將列車行駛里程數據發送至監控中心。監控中心主要由GSM通訊模塊、監控主機、管理數據庫及綜合數據接口組成,完成GSM信息的接受以及各列車行駛里程的統計和管理。
車載單元的硬件設計
車載單元的硬件主要由四大模塊組成:信息處理與控制模塊、GPS接收模塊、GSM通訊模塊和CAN總線通訊控制模塊。
信息處理與控制模塊
信息處理與控制模塊是車載終端的核心控制部件,它是一個由PIC單片機組成的系統,其主要功能是進行信息處理和控制車載終端的各組成部分,按照通信協議的要求執行相應的操作。本系統選用微芯公司生產的PIC18F458單片機,它有如下優點:
1)2MB的Flash程序存儲器;
2)4kB的EEPROM數據存儲器;
3)10MIPS的執行速度;
4)CAN總線模塊;
5)功耗低:在4MHz時鐘下工作耗電不超過2mA;在睡眠模式下耗電可低于1μA以下。
6)驅動能力強:每個I/O引腳吸入和輸出電流的最大值可以分別達到25mA和20mA,能夠直接驅動發光二極管LED、光電耦合器或者微型繼電器等。
GPS接收模塊
GPS 接受模塊即GPS接收機,它是GPS全球定位系統的用戶終端,是全球定位系統的三大組成部分之一。車載終端就是通過它來實現定位功能的。本系統采用 GAERMIN的GPS-OEM產品,它有12個通道,也就是同時可以跟蹤多達12顆GPS衛星,從而能夠快速的定位。GARMIN的GPS接收機功耗非常小,數據更新率為每秒一次,其優良的性能完全能夠滿足陸地導航的靈敏度需求。
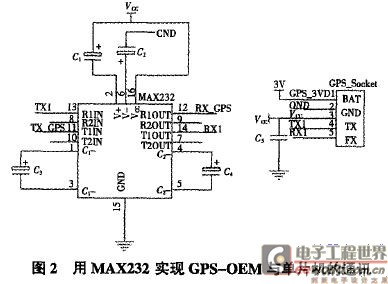
考慮到單片機輸入/輸出為TTL電平,而OEM板輸出為 RS232標準串行接口,采用的是EIA電平,因此這里需要加入能完成TTL-EIA雙電平轉換電路。本系統采用一種新型RS232轉換芯片 MAX232,其內部有電壓倍增電路和轉換電路,僅需5V電源便可工作,因此使用十分方便。連接方式如圖2所示。由于OEM板每秒刷新一次,為提高CPU 利用率,采用UART(通用異步接收/發送器)來實現串行異步通信中串并行數據轉換,也將大大提高CPU利用率。
? GSM通訊模塊
GSM 通訊模塊是車載終端的一個重要的組成部分,它負責車載終端與監控中心之間的通信。本系統采用的是西門子公司生產的GSM調制解調器TC35模塊,它提供 RS232數據接口,采用AT指令,符合ETSI的GSM0707和GSM0705標準。模塊和單片機系統通過40針的數據電纜相連。TC35模塊的數據接口是CMOS電平,因此單片機對TC35模塊的控制和通信要進行電平轉換。在本系統中,單片機串口通過OC門7404芯片完成電平轉換和TC35模塊相連。單片機與TC35模塊的接口如圖3所示。
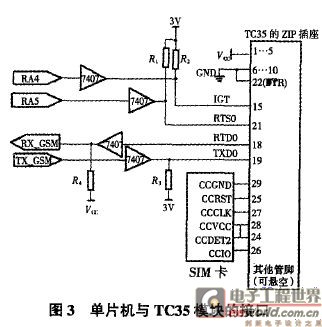
TC35模塊支持8位數據位,1位停止位,無奇偶校驗位。傳輸速率可以在4.8kbit/s到115kbit/s間自適應。對TC35模塊控制,IGT信號非常重要,只有正確的IGT信號才可以使TC35模塊正常的運行。IGT的下降沿啟動TC35,并且IGT的低電平應該至少保持 100ms,然后TC35正常工作。
CAN總線通訊控制模塊
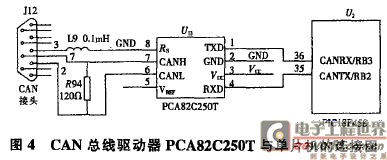
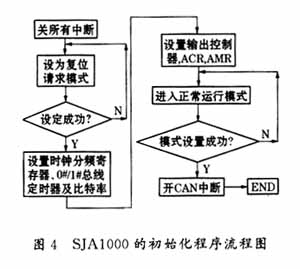
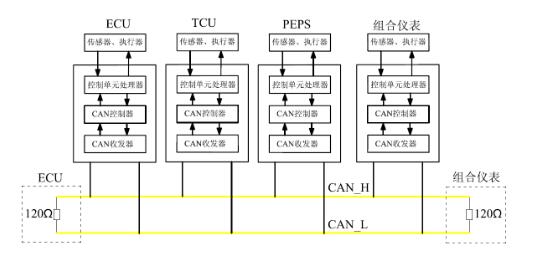
CAN總線通訊控制模塊主要完成各車載終端之間的通訊,由于CAN總線接口能在噪聲環境下進行通訊,從而保證了數據傳輸的可靠性。PIC18F458內部集成了CAN總線通訊控制器,執行的是Bosch公司規范的CAN210A/B協議,它包含完整的CAN系統。CAN總線模塊由協議驅動和信息緩沖與控制組成。CAN協議驅動CAN總線上接受和發送信息的所有功能,信息通過首先裝載到某個相應的數據寄存器發送,通過讀相應的寄存器可以檢查狀態與錯誤信息。在CAN總線上檢測到的任何信息都要進行錯誤檢查,然后與過濾器進行比較,判斷是否應該被接受和存儲到2個接受寄存器之一。圖4為CAN總線驅動器PCA82C250T與單片機的連接圖, 其中的PCA82C250T為PHILIPS公司的CAN總線驅動器,它將PIC18F458的CAN控制器輸出引腳的TTL電平變換為CAN總線上的差分信號。J12插頭的第2腳與第7腳間接有120Ω的匹配電阻。在CAN總線上,一般在兩端的CAN接頭需要接入120Ω的匹配電阻,中間則不用接。
車載終端控制器軟件編程
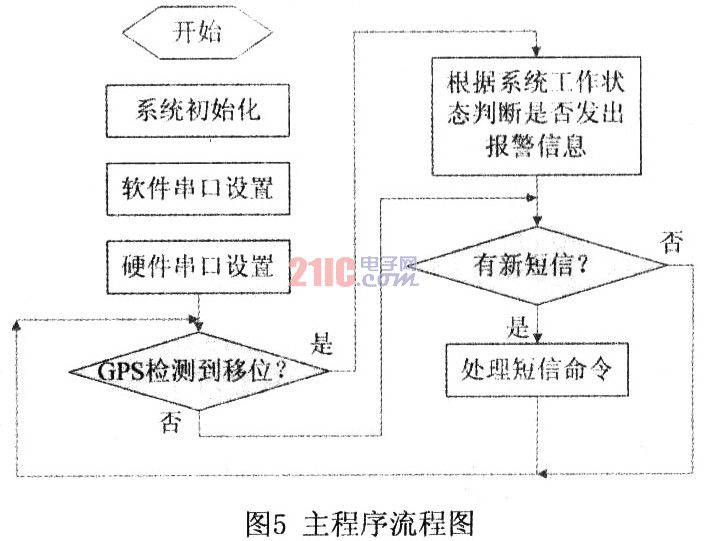
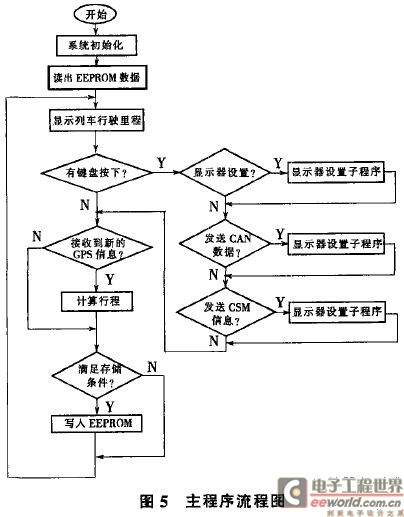
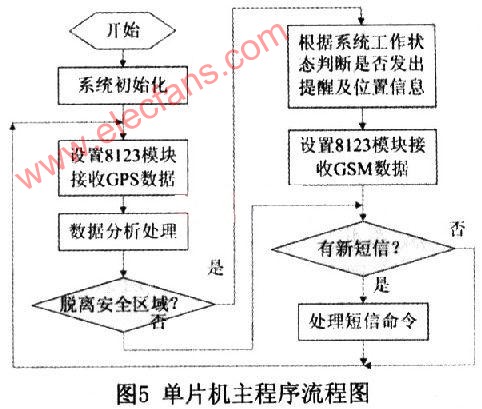
車載終端控制器的軟件主要完成3方面的任務:系統的初始化,循環處理GPS接收到的導航電文;單片機與TC35的通信以及GSM信息的發送;處理CAN總線數據的收發。這些任務在程序中是分兩部分來完成的,即主程序和中斷程序。主程序主要完成系統的初始化、CAN總線數據的發送、GSM信息的發送、列車行駛里程的計算等;中斷程序主要完成GPS信息的接收和CAN總線數據的接收。鍵盤檢測采用查詢方式。軟件采用C語言編程。主程序流程圖如圖5所示。
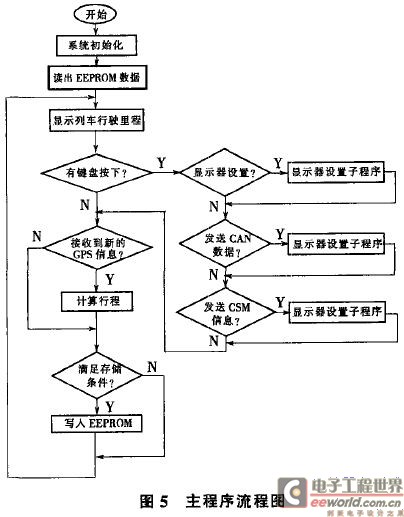
系統啟動后首先要對相應的變量和模塊進行初始化,讀出存儲在EEPROM中的列車行駛里程數據并將其顯示出來,然后檢測是否有鍵被按下。鍵盤主要完成3方面任務:顯示器設置,啟動CAN總線數據發送和GSM信息發送。GPS信息的接收采用中斷方式。系統每秒接收一個GPS信息,從GPS信息中讀出列車的行駛速度,將列車的行駛速度乘以列車的行駛時間(1s),得出列車在1s內的行駛里程并進行一次行程的累加。為保證數據的安全性,列車每行駛 1km,EEPROM中存儲的列車行駛里程數據刷新1次。
在主控車載終端,CAN總線數據的發送采用鍵盤觸發方式。信息從CAN控制器發送到CAN總線是由CAN控制器自動完成的,發送程序只需把被發送的信息送到CAN的發送緩沖區,然后啟動發送命令即可。CAN總線數據的接收采用中斷方式。當系統產生CAN中斷時,信息從CAN總線到CAN接收緩沖區是由CAN控制器自動完成的,接收程序只要從接收緩沖區讀出要接收的信息即可。
結語
在本系統中,行程測量的相對誤差主要取決于列車的行駛速度。通過大量實驗可以得出,當列車的行駛速度大于10km/h時,本系統行程測量的相對誤差小于 2%。一般而言,列車的行駛速度常高于10km/h。因此,本系統行程測量的相對誤差不會大于2%,完全滿足測量相對誤差應小于3%的設計要求。
本系統的設計完全滿足列車行程測量的準確度和可靠性要求,既實現了列車行程的自動記錄,同時也實現了對各列車的統一監控管理。它解決了現有列車行程記錄方式存在的弊端,為列車行程的測量和管理提供了一種新方法。通過對列車行駛里程及時準確的記錄和監控,確保各列車能夠得到及時的檢修,為列車的安全運行提供了保障。本系統利用了當前技術比較成熟的GSM蜂窩數字移動通訊系統和GPS全球定位系統,而且具有成本低廉、結構簡單、抗干擾能力強及可靠性高等優點,因此具有廣闊的應用前景。






















 工商網監
工商網監
評論