 電子發燒友App
電子發燒友App


本系統實現了在以TI公司的TMS320DM643為核心的嵌入式系統中,對數字電視傳輸流(TS)信號進行采集并在以太網中傳輸。利用本系統可輕松地實現在局域網中對數字電視傳輸流信號的傳輸、調度。數字電視傳輸流信號源是針對歐洲數字有線廣播系統標準(DVB-C)的數字有線電視信號。網絡接入硬件在以TMS320DM643為核心的嵌入式系統中實現,網絡接入軟件采用了TI公司針對 C6000系列DSP推出的TCP/IP NDK(Network Developer’s Kit)網絡開發包來實現。
TCP/IP是因特網上傳輸數據所必需的協議, 這種網絡通信模式在PC之間的實現已經完善, 但是體積、價格等因素限制了其應用的范圍。因此, 基于TCP/IP 協議與以太網的嵌入式系統網絡通信設計成為目前一個熱門的話題。
系統電路設計
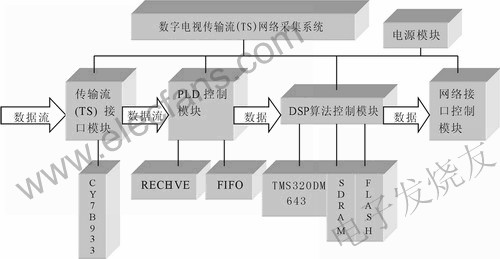
電路主要由5部分組成。數字電視傳輸流網絡采集系統框圖如圖1所示。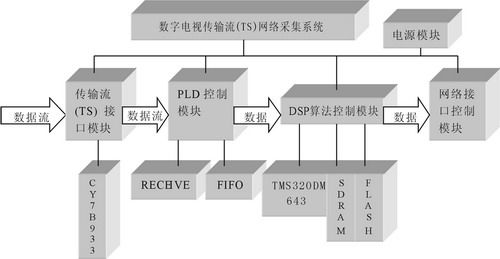
圖1 數字電視傳輸流網絡采集系統框圖
其主要功能是通過傳輸流接口模塊采集數字電視信號進入PLD(Cyclone EP1C6Q240C8)芯片,進行必要的處理后,將信號發送到DSP(TMS320DM643)芯片存儲起來,并進行算法處理。通過 TMS320DM643對BCM5221進行必要的配置,將存儲在TMS320DM643內的數據通過BCM5221傳送到局域網中,并通過計算機接收數據。
傳輸流接口模塊
傳輸流接口模塊由CY7B933輸入接口芯片及其電器接口電路組成。CY7B933輸入接口電路是點對點的傳輸模塊,可以通過光纖、同軸電纜和雙絞線進行高速的串行數據傳輸。輸入接口符合DVB-ASI的接口標準。輸入接口接收到串行位流后,通過內部 PLL時鐘同步恢復數據的時鐘信息,并對位流進行串并轉換、解碼和傳輸檢錯等操作。這種輸入接口能靈活地把高速點對點串行數據轉變成并行數據,而且應用領域廣泛,包括各種服務器、存儲器和視頻傳輸的應用。
PLD控制模塊
在項目中,此部分硬件選用的是Altera公司的 EP1C6Q240C8芯片。
此模塊的主要功能是實現與CY7B933接收芯片的接口,把數據從CY7B933接收進來,并緩存數據。這部分功能均由VHDL語言編寫的功能模塊實現。主要有兩個功能模塊:RECEIVE與FIFO。RECEIVE模塊主要負責從CY7B933接收數據字段;FIFO模塊主要負責緩存數據。
RECEIVE模塊
RECEIVE模塊的功能是實現與CY7B933接收芯片的接口,把數據從CY7B933接收進來。其工作方式是以一個傳輸流包為邊界接收數據的。
首先,RECEIVE模塊會檢測傳輸流包的邊界,通過查找包頭字節(固定為0x47)間的字節數來確定。因為包中數據也可能含有0x47,所以要犧牲3個包的數據來檢查3次。當發現0x47這個字節的時候,就會觸發一個內部的計數器開始計數。當計數到188后,如果下一個字節又是0x47,說明傳輸流包屬于188個字節的包,那么計數器被清零;如果下一個字節又是0x47,說明傳輸流包屬于188個字節的包,那么計數器被清零,否則計數器清零并重新開始檢測邊界。
當檢測到邊界以后,RECEIVE模塊開始接收數據包。計數器會從零開始計數,在接收數據的過程中使能wrreq輸出有效信號,同時把數據輸出到下一級。當計數到188 時,表示一個數據包接收完成。當一個包的數據接收完之后,計數器清零,并置ts188,保持高電平一個時鐘周期。下一個周期檢測數據是否為0x47,如果是,說明是下一個數據包的邊界;否則,說明出現了錯誤,并重新回到上一段所說的檢測數據包邊界的狀態。
此外,PLD模塊內會有一個專用計數器記錄空包數,當接收到數據包后,會首先檢測此數據包是否為空包,如果是空包,PLD模塊會把這個空包刪除,并在計數器中加1。如果接收的不是空包,就會把計數器的值加到這個數據包的私有字段中,并緩存到FIFO。然后計數器自動清零。這樣處理數據包的目的是為了減少網絡傳輸的數據流量,從而可以傳輸更多的傳輸流數據。把計數器的值加入私有字段是為了在計算機接收到數據后,可以把原來的空包恢復出來,從而保證原傳輸流數據的完整性。
FIFO 模塊
FIFO模塊的功能是從RECEIVE模塊接收數據,并緩存起來。當RECEIVE模塊接收完一個完整的傳輸流數據包之后,會發送 ts188或ts204的中斷信號給DSP,DSP就會啟動EDMA功能從FIFO模塊接收數據。DSP與FIFO模塊采用異步連接的方式,具體的接收操作在DSP部分說明中再加以描述。
DSP算法處理模塊
此模塊主要由以TMS320DM643為核心的嵌入式系統組成。主要實現從PLD模塊接收傳輸流數據包,把數據包打包成TCP/IP格式,并實現對網絡接口(BCM5221)控制模塊的初始化,然后把數據包傳送到網絡模塊。
為了實現上述功能,必須建立起一套以TMS320DM643為核心的基本系統。
系統的具體配置
?時鐘配置:EMIF內核時鐘ECLKIN是133MHz。此外,系統的外設總線、EDMA傳輸和L2存儲器的工作時鐘為CPU內核時鐘的1/2,即 300MHz;片上定時器的工作時鐘為CPU內核時鐘的1/8,即75MHz。
中斷配置:TMS320DM643除了RESET和NMI 引腳提供外部不可屏蔽中斷請求輸入以外,還有兩個外部中斷引腳GP0[5]/EXT_INT5、GP0[7]/EXT_INT7,以提供可屏蔽的外部中斷請求輸入。系統中,EXT_INT5外部中斷用作PLD模塊的請求接收數據信號,每當PLD模塊接收完一個傳輸流包,就會發送一個外部中斷信號給DSP,通知DSP接收數據。此外,EDMA中斷用于接收完一個包的數據后做后續處理。
系統對EMIF的使用情況:
系統在CE0 空間擴展了4M×64bit的SDRAM存儲器(MT48LC4M32BPG),用于存儲程序與數據。SDRAM的工作時鐘由TMS320DM643的 ECLKOUT1提供,與EMIF的工作時鐘頻率相同,本系統中默認ECLKIN為其時鐘源,即133MHz。
系統在CE1空間擴展了 4M×8bit的Flash存儲器(Am29LV033C)。在對Flash進行讀/寫訪問前,需要通過EMIF的CE1控制寄存器CE1CTL,將 CE1空間配置為8-bit異步存儲器接口,及讀/寫時序。
系統在CE2空間擴展了與FIFO模塊連接的接口。在DSP看來,FIFO模塊可視為8bit異步只讀存儲器。FIFO模塊的讀使能信號rdreq與TMS320DM643的CE2片選信號連接;FIFO模塊的讀時鐘信號 rdclk與TMS320DM643的ARE讀使能信號連接。
以太網接口
TMS320DM643上集成有一個 EMAC+MDIO片上外設,EMAC是Ethernet Media Access Controller的縮寫,即以太網媒體訪問控制器,MDIO是Management Data Input/Output的縮寫,即管理數據輸入/輸出模塊。EMAC+MDIO用于為以太網物理層(PHY)器件提供接口,其中,EMAC為接口以太網 PHY提供數據通路,MDIO為接口以太網PHY提供管理信息通路。
TMS320DM643的網絡接口原理框圖如圖2所示。圖2描述了 EMAC+MDIO與DSP中間有一個EMAC 控制模塊。它主要包含一些必備的、使EMAC更加有效使用DSP的存儲空間,控制其復位、中斷的一些邏輯。
這些寄存器的地址空間為:0x1C800000~0x1C803FFF。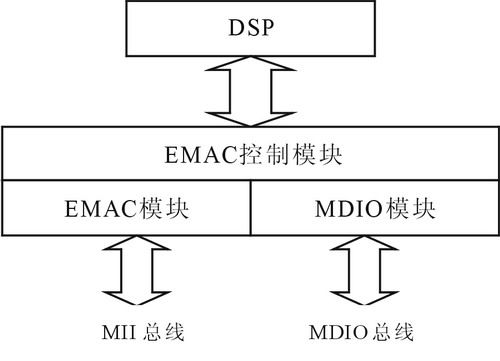
圖2 TMS320DM643的網絡接口原理框圖
網絡接口控制模塊
本系統用BroADCom公司的BCM5221作為10/100Base-TX以太網收發器,BCM5221的MII接口與TMS320DM643的MII接口對接。具體接口如圖3所示。RJ45連接器選用AMP公司的406549-1,其上帶兩個LED指示燈,右邊的 LED為綠色,用作指示連接狀態。左邊的為黃色,正常情況下用來指示數據傳輸。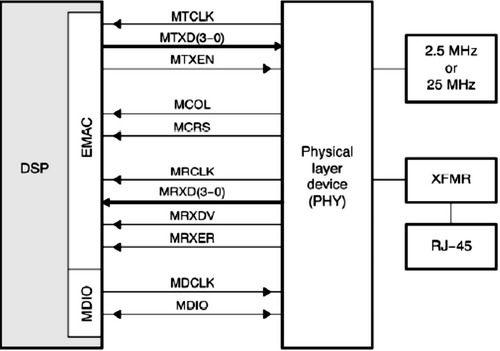
圖3 TMS320DM643與PHY設備連接框圖
電源模塊
系統包括4組電源:系統外接穩壓電源,把220V的交流電源電壓轉換成5V直流電壓;PLD模塊電源由兩種電源供電,分別是 3.3V和1.5V;TMS320DM643需要兩種電源,分別為CPU核心和周邊的I/O接口供電。周邊I/O電壓要求3.3V,CPU核心電壓只要 1.4V;網絡接口控制模塊采用3.3V電源供電。
系統軟件設計
系統的軟件設計主要是通過TCP/IP網絡開發包NDK 來實現的。該開發包支持TCP/IP協議,并占用較少的系統資源。NDK僅用200kB~250kB的程序空間和95kB的數據空間即可支持常規的TCP /IP服務。所以,NDK很適合目前嵌入式系統的硬件環境,是實現DSP網絡開發的重要工具。
系統軟件的框圖如圖4所示。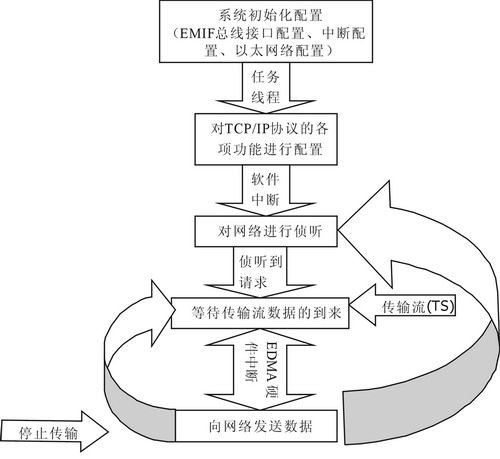
圖4 軟件系統圖
具體流程:系統配置主要在初始化函數中完成,此初始化函數將在.cinit初始化后,并在DSP/BIOS初始化和main函數之前調用。系統配置需要開啟INT8中斷,也就是 EDMA傳輸中斷,并設置GPIO7引腳為高電平,從而使PLD模塊始終處于初始狀態。TCP/IP協議配置在任務線程中完成,主要實現服務器IP地址和網關的配置。當其完成后,系統就會觸發一個軟件中斷,在軟件中斷程序中,服務器會產生一個用于偵聽的端口,并開始偵聽網絡上的請求。此時,服務器已經處于待命狀態,等待客戶機的傳輸請求。
當客戶機的傳輸請求到來時,系統首先會使GPIO7引腳變為低電平,PLD模塊開始發送數據。當其接收到一個完整的傳輸流數據包后,就會發一個中斷給DSP,DSP啟動EDMA,用ping-pong的方式接收數據進入特定的存儲器,當接收完一個完整的傳輸流數據包后,會產生硬件EDMA中斷,中斷程序主要是設置特定的標志位為1,然后退出硬件中斷,重新回到軟件中斷程序。當軟件中斷程序檢測到特定的標志位為1時,就會開始傳輸在存儲器中的傳輸流數據包給客戶機。當一個數據包傳輸完畢后,特定的標志會被置0,系統等待下一個數據包的到來。
當客戶機要求停止傳輸的請求到來時,系統會重新使GPIO引腳變為高電平,PLD模塊回到初試狀態。此時,系統也會處于待命狀態,繼續偵聽網絡。
系統初始化
初始化配置主要包括EMIF總線配置、中斷配置和底層網絡配置3個部分。初始化工作首先在DSP/BIOS的全局參數配置窗口進行設置,然后調用初始化函數進行配置。
在DSP/BIOS的全局配置窗口主要設置了DSP的工作時鐘頻率為600MHz,選擇使用的片級支持庫CSL為DM643的庫,選用小端訪問模式,片內256kB的SRAM全部用于Cache,并調用初始化函數dm643_init()。
TCP/IP 協議配置
初始化程序dm643_init()完成后,系統將進入各個線程。首先,系統會觸發任務線程TSK0,在TSK0任務線程中執行函數StackTest(),其首先調用NC-SystemOpen()函數,完成協議棧及其所需內存的初始化,然后新建一個系統配置句柄hCfg = CfgNew();,并實現服務器IP地址和網關的配置。在本系統中,IP地址配置為"192.168.0.2";子網掩碼為"255.255.255.0";網關地址為"192.168.0.1"。配置好之后,系統會觸發一個軟件中斷,并做好偵聽網絡的準備。
網絡偵聽
前面在任務線程中已經配置了IP地址和網關,下面就要在軟件中斷中設置端口并進行偵聽。首先,在開始使用報路之前,必須分配一個文件環境fdOpenSession( TaskSelf() )給這個報路。接著就可以創建一個報路對象stcp = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP),并設置端口sin1.sin_port = htons(1000),在這里設置端口號為1000,當然也可以設置其他的端口號。然后把端口號與報路對象綁定bind( stcp, (PSA) &sin1, sizeof(sin1)。最后進入偵聽狀態listen( stcp, 1)。
數據的接收
當客戶端要求傳輸數據的信號到來后,系統會使GPIO7引腳變為低電平,PLD模塊開始發送數據。DSP通過EDMA方式來接收數據。EDMA可以在沒有 CPU參與的情況下,由EDMA控制器完成DSP存儲空間內的數據搬移。系統主要采用EDMA的ping-pong方式來連續接收數據。用ping- pong方式的目的是為了使接收操作和發送操作分開進行,增強程序的操作性和可讀性。
限于篇幅,網絡發送部分不再贅述。
結語
本系統的硬件和軟件功能已經實現,網絡傳輸的速度為2MBps。按照此速度,假設傳輸流中的空包百分比為40%,可以傳輸5MBps的傳輸流數據,至少可以傳輸2~3路的TS流節目。因此,可以證明本系統的設計方法合理、有效。










 工商網監
工商網監
評論