 電子發燒友App
電子發燒友App


摘 要:為了升級現有電梯控制系統,給出了一種以LPC2294 為主控芯片的電梯主控系統的設計。軟件上以搶占式多任務實時操作系統μC/OS 為平臺,實現了電梯主控系統中的輸入采集、調度分配、CAN 通信、菜單輸出等任務;硬件建立在LPC2294 基礎上,實現了與變頻器互聯互通、編碼器脈沖反饋的采集、井道開關量的輸入輸出等。
1 引言
隨著城市化建設事業飛速發展,高層建筑和智能建筑大量涌現對電梯控制提出了許多新的要求,與此同時 MCU 與現場總線技術的發展為電梯控制系統不斷完善提供條件。由于現代電梯控制系統在安全性、穩定性、人性化的要求不斷提高,對原有系統在通信方式和電機控制方式等方面進行升級也顯得尤為必要。
在通信方式上,CAN 總線技術的引入改變了RS485 總線在電梯控制上只能構造主從結構的通信網絡、缺少總線仲裁與實時響應效果不理想等方面的缺點,這也使得在現代電梯控制系統的設計時,可以把一些井道開關量信號轎廂控制器來采集,然后通過CAN 通信把有效信號直接傳輸給主控系統,這樣就減少主控系統的負擔,增加系統的安全性;在電機控制上,電梯控制系統經歷了雙速系統、多段速系統與當前采用的模擬量控制系統三個階段,使得乘客在乘坐電梯時舒適感逐步完美,電梯控制系統也得到了不斷改變并趨完善。
2 系統簡介
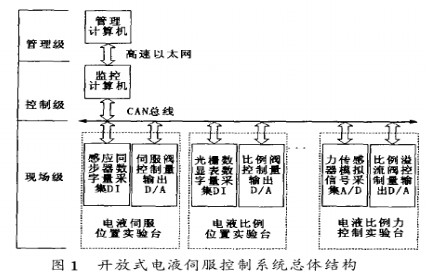
現代電梯電氣系統由電力驅動系統、電氣控制系統和安全保護系統組成(如圖1)。其中電力驅動系統由曳引電動機、速度反饋裝置(旋轉編碼器)、電動機調速裝置(變頻器)和電源系統等部分組成;電氣控制系統又由電梯主控系統、外呼控制系統、轎廂顯示、門控制系統和外召系統等部分組成;安全保護系統由光幕、急停、門鎖、安全窗等組成。

圖1 電梯控制系統結構圖
電氣控制系統中電梯主控系統主要收集電梯井道限位信號和電梯外呼內叫的呼梯信號,然后根據系統參數和系統的當前狀態,與門控制系統和電力驅動系統交互完成整個電梯的運行控制。其在電梯的電氣控制系統中扮演了舉足輕重的作用。
2 控制系統硬件設計
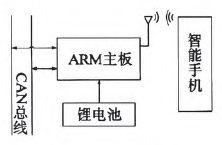
主控系統的硬件設計主要包括微控制器、CAN 通信模塊、光耦輸入、繼電器輸出、存儲器模塊、液晶顯示模塊、按鍵電路、電源模塊、復位模塊和JTAG模塊等。其硬件框圖如圖2 所示。

圖2 主控系統的模塊。
在主控系統中,外接了4 路CAN 總線收發器,分別連接到電梯外呼采集板、轎廂采集板、電動機調速裝置(變頻器)、以及群控電梯板。主控系統與電梯電氣系統的其余子系統之間的通信。光耦輸入、繼電器輸出電路的功能主要是讓電梯主控系統采集井道限位信號和輸出井道限位;液晶顯示模塊和按鍵電路則是給電梯調試人員設計的調試接口,用來查看系統運行參數和改變系統運行參數;而鐵電存儲器用來保存系統參數運行參數。
2.1 微控制器模塊
LPC2294 是基于一個支持在線仿真和跟蹤的16/32 位ARM7TDMI-STM CPU,并帶有16KB 的SRAM 和256 KB 板級高速Flash 存儲器。128 位寬度的存儲器接口和獨特的加速結構使32 位代碼能夠在最大時鐘速率下運行。對代碼規模有嚴格控制的應用可使用16 位Thumb 模式將代碼規模降低超過30%,而性能的損失卻很小。
由于LPC2294 的144 腳封裝、極低的功耗、多個32 位定時器、8 路10 位ADC、4 路CAN、PWM 通道以及多達9 個外部中斷使它們適用于汽車、工業控制應用以及醫療系統和容錯維護總線。LPC2294 包含至少76(使用了外部存儲器)~至多112(單片)個GPIO口。由于內置了高速的串行通信接口,它們也非常適合于通信網關、協議轉換器以及其它各種類型的應用。
2.2 CAN 模塊電路
在電梯控制系統中,往往是一棟大樓中使用多臺電梯構建一個由多臺電梯組成的群控系統。在一臺電梯控制系統內部主控系統要與轎廂板、外召板之間進行通信;在各電梯之間由群控板負責收集各臺電梯運行狀態和電梯負載量然后根據相應的算法進行派梯,這樣就使得控制系統中的通信壓力較大。由于LPC2294 內部帶有4 路CAN 控制器,使得該處理器很適合應用于電梯控制系統中。
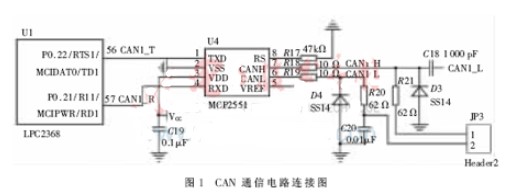
各路CAN模塊電路基本一致,從微控制器中CAN控制器上引出輸入/輸出引腳RD/TD 到CAN 收發器TJA1050 相應的管腳上。為了減少終端反射對系統的影響,需要在每路CAN 總線的兩最遠端各加上120Ω的終端電阻。從通信角度看,電梯控制系統的設計是以主控系統為中心的CAN 通信系統的設計,因而在主控系統在設計的時,給每條CAN 總線的CANH 和CANL 之間添加上了120Ω的終端電阻是必要的。另外由于系統中的供電采用的是24V 的標準工業用電,而這非電子元器件的承受電壓范圍,因而避免在工程施工中接線錯誤對系統致命破壞,設計的時候在CANH 和CANL 口線上添加了TVS 管。如圖3 所示。
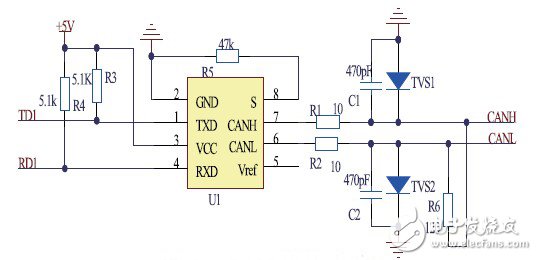
圖3 CAN 模塊電路。
CANH 和CANL 輸出到GND 的匹配電容C1 和C2 經常被用于提高抗電磁干擾的性能。相應噪聲源的阻抗和CANH 和CANL 對地的電容組成了一個RC低通濾波器,在抗干擾的性能的問題上電容的值應該盡可能大,才能獲得低的角頻率。另一方面輸出級的整個電容負載和阻抗為數據信號建立了一個低通濾波器。因此相關的角頻率要比數據傳輸頻率高。這使電容值必須由節點的數量和數據傳輸頻率決定。當TJA1050 的輸出級阻抗大約是20Ω,總線系統有10個節點,速度是500kbit/s 則電容的值不應該超過470pF.
2.3 光耦輸入電路
在電梯電氣控制系統中主控系統為了電梯不發生安全事故,安全穩定地運行,因此要實時地從電梯安全保護系統中采集電梯井道信號。對于實時性要求非常高的輸入開關量直接通過光耦輸入到主控系統,如開/關門限位、上/下強減、上/下限位、光幕、門鎖、抱閘反饋等開關量信號。另外為了減小輸入信號對微控制器的影響,在微控制器端對這些開關量信號,采用了光耦隔離其電路原理圖如圖4 所示。

圖4 光耦輸入電路。
當然部分的對實時信號要求不是特別高的輸入信號如消防、鎖梯、直駛、滿載、超載等,可以通過轎廂板或者外召板以同樣的方式采集,然后通過CAN 總線傳遞給主控制系統。
2.4 繼電器輸出電路
在電梯的輸出模塊中,為了減小外部電路對微控制器系統的影響,采用了以2803 驅動繼電器的開關量輸出形式。如主輸出、開/關門輸出、抱閘輸出、蜂鳴器、到站鐘、電源管理、鎖梯輔助、消防基站、超載指示、上行/下行指示。對于電梯中輸出信號,與輸入信號類似可以通過CAN 總線把信號傳遞給轎廂板或者外召板,然后采用以相同繼電器輸出形式輸出。
2.5 其他模塊
電源模塊:采用24V 供電, 經LM2576 和AS1117-3.3 產生 5V 與3.3V 電壓,用于系統的不同模塊。復位模塊:為使系統能夠穩定可靠工作,復位電路是必不可少的,主控系統采用的是MAX708,其是具有比較器、手動復位輸入、兩組電平輸出的微控制器芯片。液晶顯示與按鍵模塊:采用經典的四按鍵與12864點陣液晶的設計,能夠對顯示菜單比較合理的操作,在系統中用GPIO 控制。存儲模塊:主要用來保存用戶參數的和系統的運行參數(比如用戶密碼、操作員管理密碼、從變頻器采集到的脈沖數等)。存儲芯片選用了基于鐵電技術的 64K 位非易失性鐵電存儲器FM24CL64,與微控制器采用的是標準兩線I2C 的接口,這樣能夠較好地與LPC2294 連接。

圖5 繼電器輸出電路。
3 控制系統軟件設計
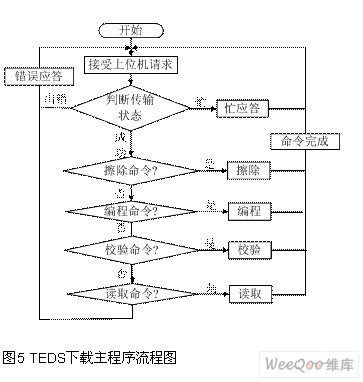
控制系統軟件設計時采用了當前主流的keil 集成開發環境。軟件設計以搶占式多任務實時操作系統μC/OS 為平臺實現[5]了電梯主控系統的調度分配、CAN通信、液晶顯示三個任務,如圖6 所示。

圖6 系統控制通信圖。
任務之間通信以消息隊列和郵箱方式進行通信。
在與硬件接口上根據LPC2294 芯片手冊和應用的需要,完成了CAN 模塊的驅動、I2C 的總線模塊的驅動、和GPIO 的模式的按鍵和12864 點陣液晶驅動,這樣使得在μC/OS 的任務中無需關注LPC2294 芯片板上資源的具體使用,而只需要調用相應的接口函數,方便了系統軟件的升級和改動。
3.1 主控調度任務
在主控調度任務中完成當前梯呼梯信號的整合,然后再根據當前收集到的群控正常等輸入信號判斷當前梯的運行狀態(如自動狀態、消防狀態、鎖梯狀態等),做出當前狀態的處理;在電梯處在可調度的狀態下,根據相應的調度算法完成對電梯的呼梯的合理配置;并通過消息隊列和郵箱與CAN 通信任務、液晶顯示任務進行任務間通信,完成數據的交互。
3.2 CAN 通信任務
原則上對4 路CAN 控制器的資源分配為:CAN0外呼通信、CAN1 內召通信、CAN2 變頻器通信、CAN3群控子系統通信[7]。但系統中可以在軟件上進行相應的配置,然后使得任意CAN 控制器可以與任意的外部子系統相連,這樣就增加了系統的靈活性,也給操作人員帶來了方便。在CAN 通信任務調用之前,需要調用相應的CAN 控制器初始化函數,對CAN 控制器中斷、波特率、驗收過濾器等進行相關的設置。在CAN通信任務中,一方面需要完成4 路CAN 控制器通過中斷方式接收到緩沖區中的數據再驗證無誤后交付給主控調度任務,令一方面需把主控會把給群控調度器、變頻器、內召板、轎廂板發送的信號或者命令交付給CAN 通信任務。CAN 通信任務再接收到主控的數據做相應的驗證,封裝成相應的協議格式的幀,然后發送給相應的子系統。
在CAN 通信中,發送數據的封裝和接收數據的解封遵循的格式除了變頻器部分參考第三方提供的CAN 總線通信協議,其他模塊與主控系統的通信完全依靠下述自定義協議。在電梯控制系統中,CAN 通信全部采用CAN2.0 所規定的擴展數據幀[5-7],其格式如表1 所示。傳輸的幀中29 位ID 按下表劃分(全0 或者全1 將被舍棄)。
表1 擴展幀ID 格式

在表1 中,主控部分的子設備dev 有外呼、內召、群控、變頻器,以序號001、010、011、100 等;“-”部分是在設計協議中沒有用到的數據位,程序中用0填充;cmd 表示發送方給接收方發送的命令字(如相應信號登記命令、相應信號清除命令);data 部分表示發送方給接收方發送的信號數據,由于在系統設計的時候考慮的最高樓層為64,因此數據部分在傳輸的時候,每次主控給與外呼、內召通信的時只需要一幀就可以完成,其數據字節bye1 的BIT0 表示第1 樓信號,byte8的BIT8 表示第64 樓信號。
3.3 液晶顯示任務
從任務間通信角度,液晶顯示任務主要接收主控任務以消息隊列方式傳入的相關系統參數(如上/下行、當前樓層、目標樓層等),然后通過調用12864 點陣液晶驅動函數和查詢用戶按鍵的輸入狀態,提供給用戶相應的顯示菜單,以現實相關的系統參數。
當然該任務,也得提供給用戶相關系統參數設置的接口, 然后把相關參數保存在鐵電存儲器FM24CL64 中。
4 結束語
本文設計的基于CAN 總線的電梯主控制系統具有成本低,工作穩定等特點,完全能夠滿足國標GB7588-2003 對電梯控制系統的各項指標。由于篇幅的限制,本文沒有給出相應的外召板、內叫板,群控板的設計及其具體的實現,另外與變頻器的接口完全按照變頻器第三方基于CAN 總線的具體通信協議。












 工商網監
工商網監
評論