 電子發燒友App
電子發燒友App


變頻馬達主要依靠半導體元件組成的電子電路來驅動馬達運轉,其中MCU數位控制技術的良寙攸關著馬達效率是否理想;而在MCU控制技術日趨成熟,加上FOC演算法助力之下,變頻馬達效率將逐步躍進。
馬達是家電產品中,不可或缺的動力元件,馬達的使用量,也是生活舒適程度的指標之一。家電產品中,常見的馬達基本上有三種:交流感應馬達(AC Induction Motor, ACIM)、直流有刷馬達(Brushed DC Motor)、直流無刷馬達(BLDC/PMSM)(亦稱變頻馬達)。事實上,馬達的分類方式可從以下幾點區分。
.電源
從電源的使用上來看,可簡易分成交流馬達與直流馬達兩大類。
.控制方式
從馬達控制上來看,可以簡易分成同步控制與非同步控制(感應控制)兩大類。BLDC/PMSM馬達采用同步控制方式,系利用定子上的電流控制來同步控制馬達轉子的旋轉。ACIM馬達采用的是感應控制方式,系利用定子的電流環的控制,感應帶動轉子,轉子磁場環與定子磁場環因而存在速度差。
.定子繞線組數
最常見的有三相馬達與單相馬達,其中三相繞組還有分成Y結線與星型結線兩種。
.電刷
從電刷有無來看,可以簡易分成有刷馬達與無刷馬達兩大類。有刷馬達將直流電供給繞組的機構為電刷與整流子(固定在定子上的就是電刷,固定在轉子上的就是整流子),無刷馬達則是采用電子電路來取代電刷與整流子。
家電產品加速導入 高效率節能馬達商機起飛
驅動直流馬達在家電產品的使用風潮的主因有以下幾點。
.能源危機
根據國際能源總署(IEA)資料顯示,馬達是耗電量最大的應用,約占全球電力消耗46%以上,因而也成為業界落實節能減碳的首要改善重點,其中直流馬達在高效率節能上的表現,優于傳統的ACIM。直流馬達的使用,已漸成家電產品動力元件的趨勢。
據估計,從IE1升級到IE3,省電效率可提升8%。馬達最低能效標準(MEPS)政策實施,目前是在宣導期,未來一旦進入強制期,將掀起一波馬達汰舊換新風潮,并刺激馬達制造商與半導體廠,加速推出更高效率的新方案。
.電源技術進步
三個關鍵的電源技術--鋰電池元件、開關電源供應(Switching Power Supply)技術以及太陽能板電源技術的采用,讓家電產品產品與行動電源結合成為新的安全家居與休閑概念產品。例如近年來在日本大為流行的充電式風扇,標榜為安全家電,其停電可使用電池,有電時使用轉接頭(Adaptor)透過市電供電。另外歐洲人喜歡旅游,充電式風扇可隨身攜帶,露營時沒有市電插,也可以有電風扇吹。充電式風扇除了可結合太陽能板充電,也可以利用汽車DC12伏特(V)充電,使用相當方便。
.數位控制IC技術成熟
如今微控制器(MCU)價格大幅下降,以迎合家電產品設計加量不加價的設計需求。此外,數位脈寬調變(PWM)控制技術成熟,可用同一顆IC做到方波或弦波控制,讓馬達制造商與半導體業者在廠物料控管上更為方便。
.DC馬達元件優勢
在同樣功率下,DC馬達功率轉換效率比傳統的ACIM還要好。此外,家電產品因應成本降低,常須使用塑膠材料,而塑膠材料非常怕過熱,例如養生的果菜汁機、食品攪拌機等。DC馬達相較AC馬達不易發燙,因而更具優勢。
另一方面,在同樣功率下,DC馬達扭力也較ACIM強。近年來家電機構設計強調美觀,有小型化設計趨勢,因此DC馬達較ACIM更合適用于體積小但要求大扭力的家電馬達產品,例如電動起子、飲水機用水泵、醫療用氣泵等。
.家電新趨勢
居家生活品質的提高已成為全球趨勢,DC馬達的靜音訴求與無級調速功能大量運用在新家電產品功能設計上,例如DC落地扇、吊扇、空調產品等。
驅動高效率BLDC MCU關鍵設計有門道
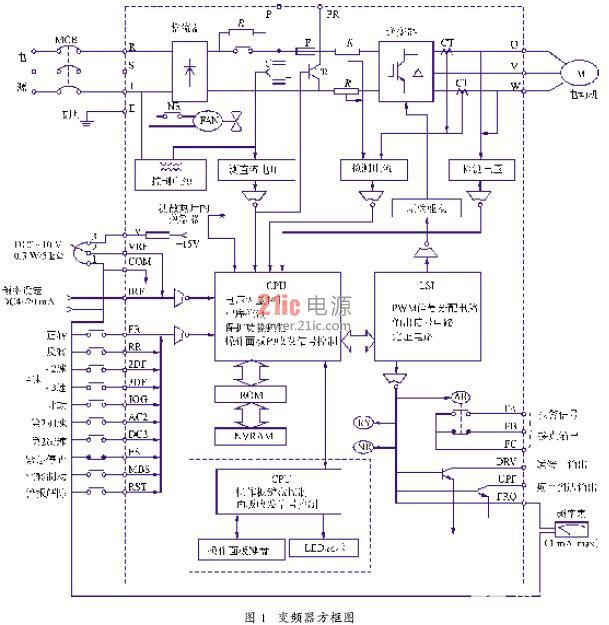
BLDC馬達控制主要是采用同步控制方式,更準確地說,BLDC是一種雙回授控制方式。由MCU控制定子電流方向,主導轉子下一步的位置,轉子位置回授,轉子位置回授分成有感測器(Hall或是Encoder)與無感測器(Sensorless)兩種方法,另外,電流回授主要目的在于過電流保護用。整個BLDC方案系統方塊圖如圖1;從圖中,可以簡易看出決定馬達產品效率的關鍵元件。
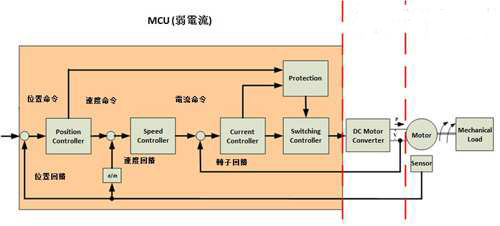
圖1 BLDC系統配置方塊圖
.Power電路
主要分成市電應用與DC電源應用兩種,主要設計考量為功率轉換效率。
.MOS元件
主要為Rds規格,考量重點在于金屬氧化物半導體場效電晶體(MOSFET)發熱損耗。
.Gate Driver驅動電路
主要有兩種--三級管電路與閘極驅動器(Gate Driver) IC;考量重點在于Gate Driver Rising/Falling Timing所造成的開關元件損耗。
.MCU
依據產品方案需求,可選擇以方波或是弦波控制,搭配馬達回授控制感測器方案與無感測器方案,可以分成四種方案:方波Hall方案、方波Sensorless方案、弦波Hall方案與弦波Sensorless方案。
.馬達材料
主要考量銅損、鐵損等馬達材料特性所造成的功率損耗。
MCU馬達控制內部設計主要分成五大部分(圖2),以下列點說明。
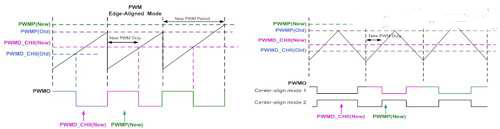
圖2 PWM Edge-aligned Mode與Center-aligned Mode電路
.PWM調制電路
主要有Edge-aligned Mode與Center-aligned Mode兩種模式。
.馬達定子電流控制電路
搭配Hall Sensor Decoder與Mask電路配置決定方波控制與弦波控制方式。
.馬達驅動電路控制
主要設定MOS死區時間(Dead-time)、外部Gate Driver電路驅動極性、防呆電路等控制方式。
.馬達轉子偵測電路
利用專屬的Timer觀測轉子位置變化,偵測轉子轉速與堵轉與否。
.馬達保護電路
主要有馬達驅動過電流保護電路與馬達堵轉保護電路兩種模式。
此外,馬達控制方式基本上采用的是控制系統常用的PID控制方法(圖3),以速度環PID控制為例,其運作步驟如下。

圖3 馬達PID控制要素
1.從人機介面取得控速命令,例如VR=0.5V代表機械轉速500rpm
2.決定馬達定子電流控制方式,例如以方波控制或者是弦波控制。
3.采用Hall或者是Sensorless方式監控馬達轉子位置并監控轉子轉速。
4.MCU計算馬達是否到達轉速要求,利用PWM機制做轉速調整。
要特別注意的是,高效率馬達控制很重視換相點與定子電流的換相位置,依據馬達特性不同轉速,對換相點的補償可能會有所不同,須要依產品需求來做換相點控制的補償與調整,因此可以輕易地從馬達的DC Bus電流平穩度,看出馬達控制是否牢靠。
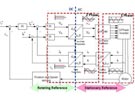
FOC演算法助力 PMSM控制效率升級
針對PMSM(反電動勢是弦波),高效節能馬達控制方式采用磁場定向控制(Field Oriented Control, FOC)方式控制,搭配這種弦波電流方式控制,可以達到最高效率,主要應用于空調類壓縮機與大功率馬達應用,例如跑步機、電動摩托車等。
FOC方案系統架構圖如圖4,A線的右邊可以說是用定子的角度來看系統變化,而A線的左邊就是以轉子的角度來看系統變化。

圖4 FOC演算架構圖
FOC是用向量來代替定子電流做控制,一般又稱為向量控制(Vector Control),其運算原理主要是將馬達的三相電流的三維座標軸,轉換成二維座標軸(d和q座標軸)上。
FOC系采用數學方法來實現三相馬達的力矩和勵磁的解耦控制,因此定子電流可以被看成勵磁電流Id(產生勵磁)或交軸電流Iq(控制電磁力矩,類似于DC馬達的電樞電流)
FOC演算法優點在于可在最佳的扭力之下工作,當負載變化時,速度回應快速而精確,讓馬達的暫態效率得到優化,且在動態反應中,能夠達到非常精準的可變速度之控制。
FOC方案設計亦可分成有FOC-Hall與FOC-Sensorless兩種方式(圖5)。

圖5 FOC-Hall與FOC-Sensor-less電路架構圖
.FOC Hall
利用Hall訊號做轉子位置偵測,可精準偵測馬達轉子位置
.FOC Sensorless
透過兩路類比數位轉換器(ADC)偵測電流,經過MCU轉換計算取得馬達轉子位置。
要特別注意的是,要做到精準的Ia/Ib電流檢測,除ADC轉換速度的規格,通常須要求到1Mbit/s的采樣速率之外,包含印刷電路板(PCB)設計與外部濾波電路的搭配,再加上MCU演算法的熟悉,環環相扣,都是相當重要的。











 工商網監
工商網監
評論