 電子發(fā)燒友App
電子發(fā)燒友App


1、本文使用的STM32芯片是STM32F103RB,使用的資源是片內(nèi)的USART1。
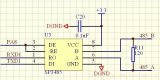
2、下面是我的電路連接圖:
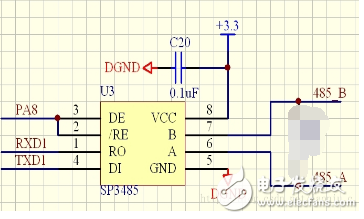
注:電路可以稍做修改更好,在B和A分別接下拉電阻到地和上拉電阻到5v,阻值選擇為10K即可,這是為了在沒有進行數(shù)據(jù)傳輸時保證兩條數(shù)據(jù)線的狀態(tài)為確定值。
做一下簡單的說明:
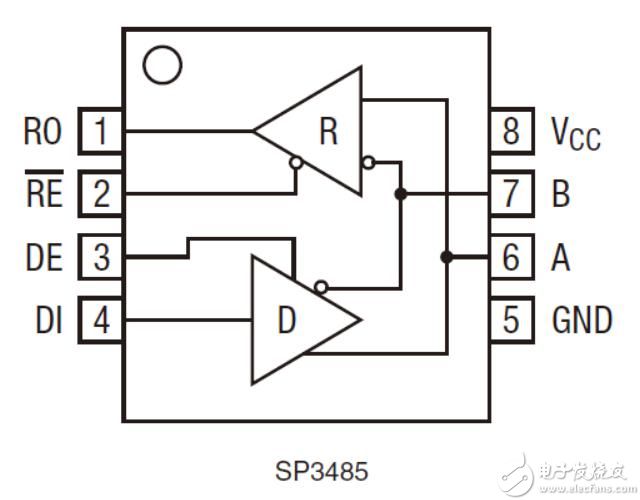
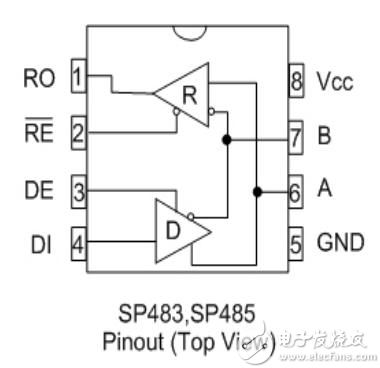
(1)PA8是sp3485的發(fā)送/接收使能端,sp3485只能支持半雙工的通信,所以這個引腳就是來控制這個芯片到底是收數(shù)據(jù)還是發(fā)數(shù)據(jù)的。
(2)在有些電路連接中,sp3485的A和B端會一個被連接一個上拉電阻到3.3V,另一個會連接一個下拉電阻到GND,這樣做的目的是當本sp3485不參與通信時不會影響網(wǎng)絡(luò)的穩(wěn)定性。
3、本次調(diào)試方式
PC機——USB轉(zhuǎn)232轉(zhuǎn)換頭——RS232/RS485雙向轉(zhuǎn)換頭——sp3485——STM32,因為是第一次調(diào)試sp3485芯片,所以當然沒有太大意,先拿電腦調(diào)試,調(diào)試通了再看板子和板子之間的通信了。
4、本次試驗的代碼:
main函數(shù):
int main(void)
{
/* Configure the system clocks */
RCC_Configuration();
/* NVIC Configuration */
NVIC_Configuration();
/* Configure the GPIOs */
GPIO_Configuration();
/* Configure the USART1 */
USART_Configuration();
GPIO_SetBits(GPIOA, GPIO_Pin_8); //PA8是sp3485發(fā)送/接收控制端,這里先設(shè)置為發(fā)送(實現(xiàn)的功能就是上電之后STM32先向PC發(fā)送一個4和一個3)
delay_ms(2);//稍稍延時一下,原因去查看sp3485的手冊吧
USART_ClearFlag(USART1,USART_FLAG_TC);//這一句很關(guān)鍵,如果沒有這一句這個4會發(fā)送不成功或者發(fā)送錯誤的,
//其實手冊上講了使能發(fā)送位后會發(fā)送一個無用的幀,所以那個幀發(fā)送完了這個
//發(fā)送完成的標志位USART_FLAG_TC當然也被置位了。
USART_SendData(USART1, 4);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);//上面清除了發(fā)送完成標志位,那么這里就可以等待發(fā)送完成標志位被置位來判斷這一幀是否發(fā)完了
USART_SendData(USART1, 3);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
while(1)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_8);//現(xiàn)在把PA8清零,試試接收PC機發(fā)送過來的數(shù)據(jù)
delay_ms(2);//稍稍延時一下,原因去查看sp3485的手冊吧
USART_ClearFlag(USART1,USART_FLAG_RXNE);//既然上面開始發(fā)送之前都將發(fā)送完成標志位清零,這里也將接收完成標志位清下零,就當是一個好習(xí)慣吧
while(1)
{
if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)==SET)//判斷是否有一幀數(shù)據(jù)接收完成
{
buf[j++] = USART_ReceiveData(USART1); //接收完成的話就直接放到緩存區(qū)域里
}
if(10 == j)//接收完成10個之后就跳出去,不再接收了,有個意思就OK了
break;
}
j = 0;//清零一下j變量,使得實驗可以反復(fù)接收PC發(fā)過來的10個數(shù)據(jù)
GPIO_SetBits(GPIOA, GPIO_Pin_8);//將sp3485設(shè)置為發(fā)送數(shù)據(jù)
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
delay_ms(2);//稍稍延時一下,原因去查看sp3485的手冊吧
for(i = 0; i 《 10; i++)
{
USART_SendData(USART1, buf[i]);//將數(shù)據(jù)依次發(fā)送出去
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
}}}
注:在用STM32的串口做485通信的時候,發(fā)送數(shù)據(jù)的時候,檢測到最后一個數(shù)據(jù)發(fā)送后的標志位已經(jīng)置位,但是還不能立即失能485芯片的發(fā)送引腳,因為雖然標志位已經(jīng)置位,485芯片的數(shù)據(jù)還沒有完全發(fā)送出去,這個時候需要ms級別的延時,一般2個毫秒左右基本就沒有問題了。
RCC設(shè)置函數(shù):
void RCC_Configuration(void)
{
/* RCC system reset(for debug purpose) */
RCC_DeInit();
/* Enable HSE */
RCC_HSEConfig(RCC_HSE_ON);
HSEStartUpStatus = RCC_WaitForHSEStartUp();
if(HSEStartUpStatus == SUCCESS)
{
/* HCLK = SYSCLK */
RCC_HCLKConfig(RCC_SYSCLK_Div1);
/* PCLK2 = HCLK */
RCC_PCLK2Config(RCC_HCLK_Div1);
/* PCLK1 = HCLK/2 */
RCC_PCLK1Config(RCC_HCLK_Div2);
/* Flash 2 wait state */
FLASH_SetLatency(FLASH_Latency_2);
/* Enable Prefetch Buffer */
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);
/* PLLCLK = 8MHz * 9 = 72 MHz */
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
/* Enable PLL */
RCC_PLLCmd(ENABLE);
/* Wait till PLL is ready */
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)
{
}
/* Select PLL as system clock source */
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
/* Wait till PLL is used as system clock source */
while(RCC_GetSYSCLKSource() != 0x08)
{
}}
/* Enable USART1 and GPIOA clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOC, ENABLE);
}
GPIO設(shè)置函數(shù):
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure PC. as Output push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//GPIO_Mode_Out_PP = 0x10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//GPIO_Mode_Out_PP = 0x10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
USART設(shè)置函數(shù):
void USART_Configuration(void)
{
USART_InitTypeDef USART_InitStructure;
USART_ClockInitTypeDef USART_ClockInitStructure;
USART_ClockInitStructure.USART_Clock = USART_Clock_Disable;
USART_ClockInitStructure.USART_CPOL = USART_CPOL_Low;
USART_ClockInitStructure.USART_CPHA = USART_CPHA_2Edge;
USART_ClockInitStructure.USART_LastBit = USART_LastBit_Disable;
/* Configure the USART1 synchronous paramters */
USART_ClockInit(USART1, &USART_ClockInitStructure);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
/* Configure USART1 basic and asynchronous paramters */
USART_Init(USART1, &USART_InitStructure);
/* Enable USART1 */
USART_Cmd(USART1, ENABLE);
}
NVIC設(shè)置函數(shù):
void NVIC_Configuration(void)
{
#ifdef VECT_TAB_RAM
/* Set the Vector Table base location at 0x20000000 */
NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else /* VECT_TAB_FLASH */
/* Set the Vector Table base location at 0x08000000 */
NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
}










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論