 電子發(fā)燒友App
電子發(fā)燒友App


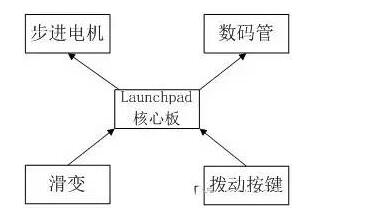
本文選擇MSP430G2231為Launchpad核心板的單片機,采用Launchpad核心板加底板的形式,對步進電機進行控制。滑變,即滑動變阻器,用來控制電機的轉(zhuǎn)速,本系統(tǒng)共有兩個撥動按鍵,一個撥動按鍵用來選擇步進電機的模式,如四相八拍或四相四拍,另一個撥動按鍵用來控制轉(zhuǎn)動方向。數(shù)碼管可用來顯示模式和方向,以及轉(zhuǎn)速的百分比。
系統(tǒng)總體設(shè)計框圖
在硬件設(shè)計時,只需設(shè)計外圍電路,留出與Launchpad核心板的接口即可,既節(jié)約了設(shè)計時間,又節(jié)省了成本,而且無需額外購買仿真器,從而使設(shè)計成本到達最低。
在軟件設(shè)計方面,可充分利用G2系列單片機的各個功能模塊,如時鐘系統(tǒng)、TA定時器、ADC10模數(shù)轉(zhuǎn)換器,看門狗,以及IO口中斷等資源,設(shè)計出高效率、低功耗、結(jié)構(gòu)緊湊而又功能強大的產(chǎn)品。
MSP430G2系列Launchpad開發(fā)板組成及硬件資源情況介紹
MSP430G2系列Launchpad是TI推出的一款低成本的開發(fā)平臺。它適用于適用于TI 最新MSP430G2xx系列產(chǎn)品,其基于USB 的集成型仿真器可提供為全系列MSP430G2xx器件開發(fā)應(yīng)用所必需的所有軟、硬件。
LaunchPad 具有集成的DIP 目標插座,可支持多達20 個引腳,從而使MSP430 Value Line 器件能夠簡便地插入LaunchPad 電路板中。
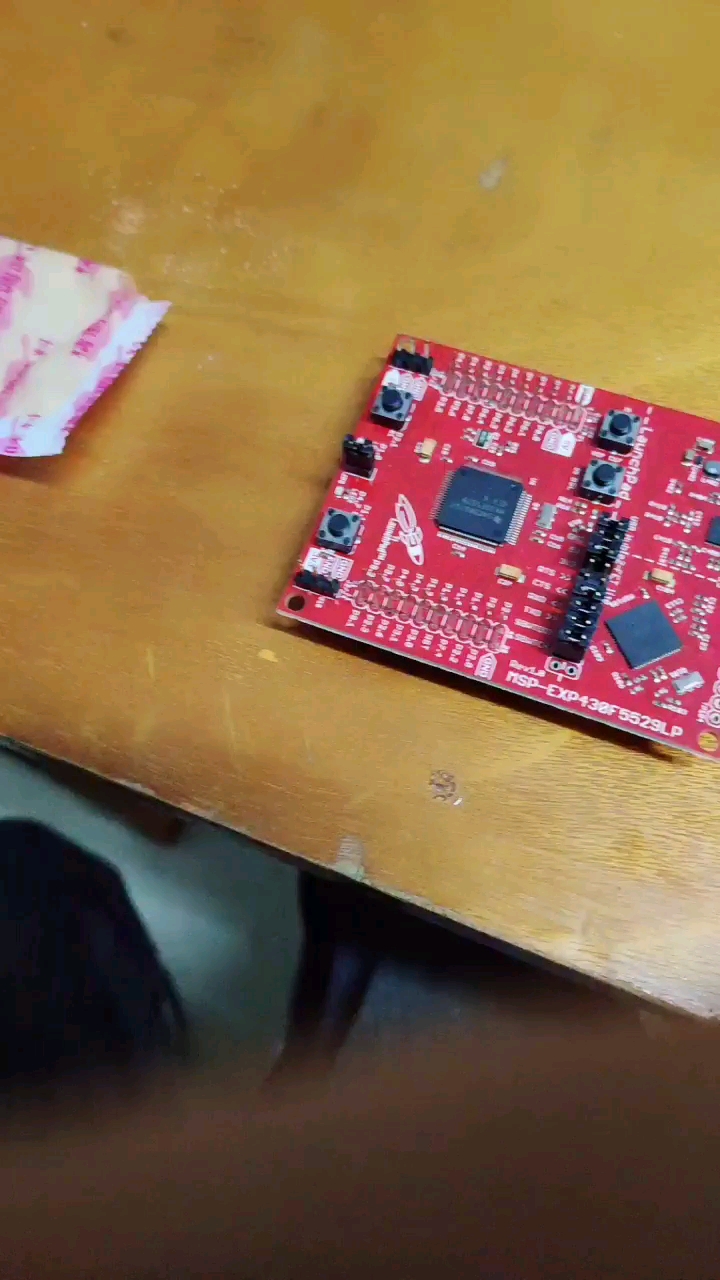
此外,其還可提供板上Flash 仿真工具,以直接連接至PC 輕松進行編程、調(diào)試和評估。LaunchPad 試驗板還能夠?qū)Z430-RF2500T 目標板、eZ430-Chronos 手表模塊eZ430-F2012T/F2013T 目標板進行編程。此外,它還提供了從MSP430G2xx 器件到主機PC 或相連目標板的9600 波特UART 串行連接。其實物圖如圖2.1所示。

圖2.1.1 MSP430G2系列Launchpad開發(fā)板實物圖
MSP430G2系列Launchpad開發(fā)板硬件資源:
? USB 調(diào)試與編程接口無需驅(qū)動即可安裝使用,且具備高達9600波特的UART串行通信速度
? 支持所有采用PDIP14 或PDIP20 封裝的MSP430G2xx和MSP430F20xx 器件
? 分別連接至綠光和紅光LED 的兩個通用數(shù)字I/O 引腳可提供視覺反饋
? 兩個按鈕可實現(xiàn)用戶反饋和芯片復(fù)位
? 器件引腳可通過插座引出,既可以方便的用于調(diào)試,也可用來添加定制的擴展板
? 高質(zhì)量的20 引腳DIP 插座,可輕松簡便地插入目標器件或?qū)⑵湟瞥?/p>
關(guān)鍵器件選型以及性能指標參數(shù)
一、步進電機
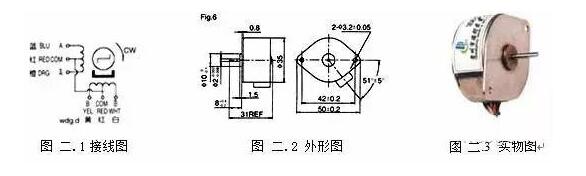
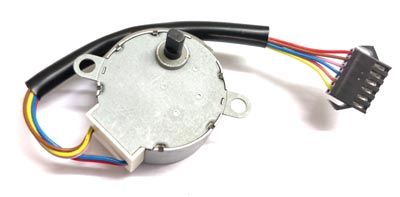
本作品選用的是常州市德利來電器有限公司生產(chǎn)的35BY48BH10型步進電機,其技術(shù)數(shù)據(jù)、接線圖、外形圖和實物圖如下所示。
1. 技術(shù)數(shù)據(jù)

2. 接線圖 & 外形圖 & 實物圖
二、L298N
作為電機驅(qū)動的核心器件,電機驅(qū)動芯片的選型對整個系統(tǒng)的可靠性和性能都起著至關(guān)重要的作用。本作品中選用了意法半導(dǎo)體ST生產(chǎn)的L298N電機驅(qū)動芯片。其關(guān)鍵指標如下:
圖2.2.1L298N實物圖
1. 供電電壓可高達46V,直流電流可達4A。完全滿足步進電機的驅(qū)動要求。
2. 低飽和電壓。
3. 過熱保護。
4. 邏輯0輸入電壓可達1.5V,可有效抑制噪聲;邏輯1輸入電壓可低至2.3V,所以可以用430單片機直接驅(qū)動。
綜上可見,L298N電機驅(qū)動芯片可以完全滿足本作品的要求。
三、Max7219
由于IO引腳有限,所以采用串行方式控制數(shù)碼管,數(shù)碼管驅(qū)動芯片選擇Max7219,它最多能驅(qū)動8位數(shù)碼管,能獨立完成刷新掃描而不需要單片機的參與,每位獨立控制,內(nèi)部有解碼器,可選擇解碼和不解碼兩種方式,亮度可以通過數(shù)字或模擬方式控制。從各個方面來講,它都是本例的最佳選擇。
圖2.2.1 Max7219實物圖
系統(tǒng)主要由單片機,電機驅(qū)動電路,控制電路,電源電路以及數(shù)碼管顯示電路組成,系統(tǒng)原理圖如圖2.3.1所示。
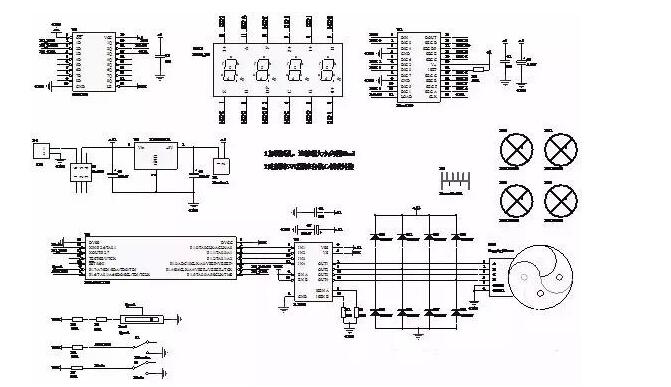
圖2.3.1系統(tǒng)原理圖
下面是各個模塊的具體介紹:
1.電機驅(qū)動模塊
因為L298N邏輯1輸入電壓可低至2.3V,所以可以用430單片機直接驅(qū)動,IN1、IN2、IN3和IN4接到單片機管腳上。Vss接供電電壓,Vs接輸入邏輯電壓,可接3.3V,本例為了走線方便,直接接5V。
EN A和EN B接高電平,I SEN A、I SEN B通過一個小電阻接地,目的是限制負載電流過大,OUT1、OUT2、OUT3和OUT4直接接步進電機,因為電機的感性器件,電流不能突變,所以接上8個二極管以保護電源。另外在Vss和Vs附近必須接一個100uF的電容,當這個大電容離器件太遠時,必須在近處再接一個小電容。

2. 電機控制模塊
如圖所示,滑變用來控制電機的速度,Speed接到單片機的A7腳上,通過測量電壓值,計算出恰當?shù)难訒r時間,達到控制速度的目的。
轉(zhuǎn)動方向和Mode用來改變電機的轉(zhuǎn)向和模式,即選擇四相四拍或四相八拍模式。
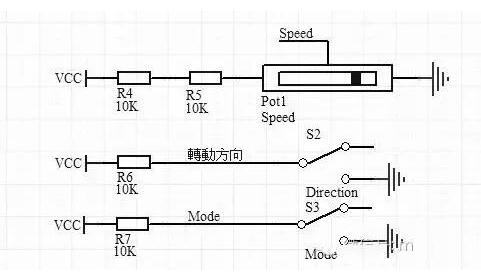
圖2.3.3電機驅(qū)動模塊
3. 數(shù)碼管顯示模塊
由于IO引腳有限,所以采用串行方式控制數(shù)碼管,數(shù)碼管驅(qū)動芯片選擇Max7219,它最多能驅(qū)動8位數(shù)碼管,能獨立完成刷新掃描而不需要單片機的參與,每位獨立控制,內(nèi)部有解碼器,可選擇解碼和不解碼兩種方式,亮度可以通過數(shù)字或模擬方式控制。從各個方面來講,它都是本例的最佳選擇。
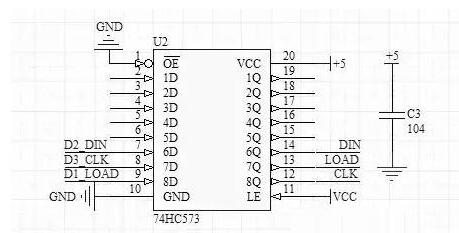
圖2.3.4電平轉(zhuǎn)換模塊
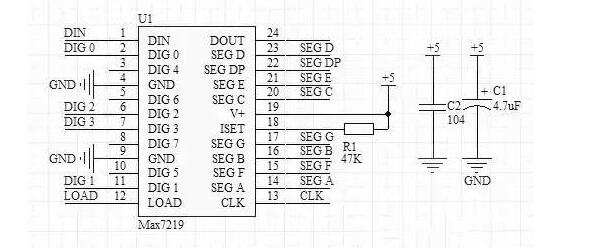
圖2.3.5數(shù)碼管驅(qū)動模塊
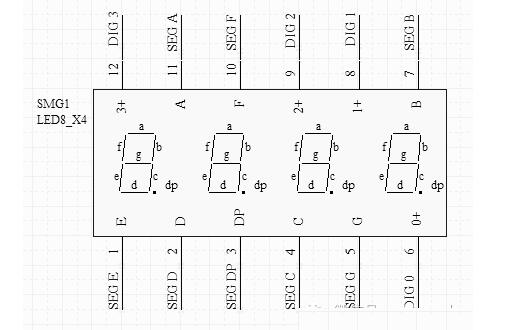
圖2.3.6數(shù)碼管
注意在使用時必須在該芯片附近接一個大電容,比如4.7uF。
由于它是5V邏輯電平,而MSP430是3.3V電平,所以用74HC573進行電平轉(zhuǎn)換。
數(shù)碼管用的是共陰極四位數(shù)碼管,這是由驅(qū)動芯片Max7219決定的。
PCB板與系統(tǒng)元器件清單
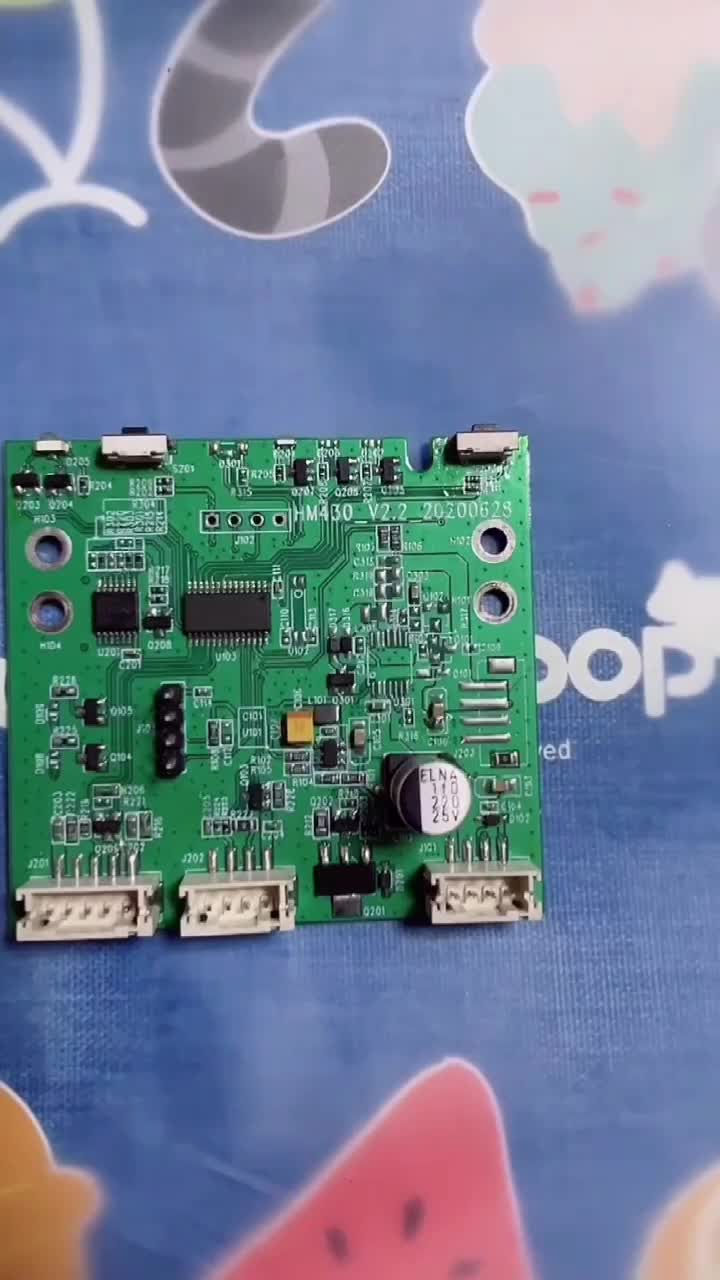
1. PCB板
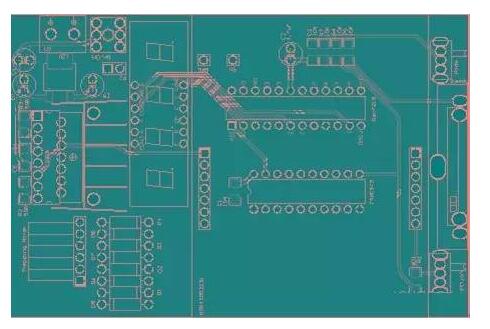
圖2.4.1 PCB板正面
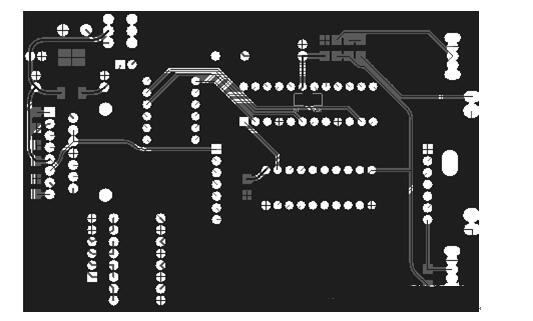
圖2.4.2 PCB板背面
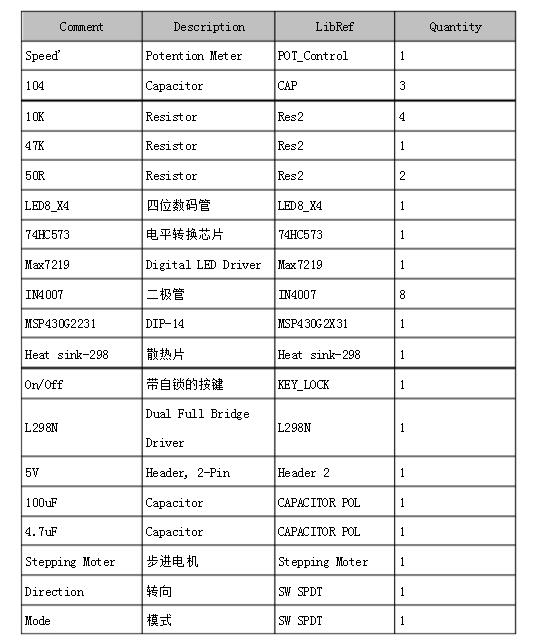
2、系統(tǒng)元件清單如表
PCB板設(shè)計要求和注意事項
由于是大功率器件,所以100uF電容必須離芯片越近越好,否則應(yīng)再在L298N附近加上一個小電容,此外二極管也必須離芯片輸出引腳越近越好。Max7219的電容也應(yīng)該離芯片越近越好。
安裝調(diào)試注意事項
由于是大功率器件,所以要加散熱片,安裝時就先焊散熱片,再插入L298N,用螺絲固定到散熱片上后,再焊L298N的各個管腳。安裝好的實驗板、插上Laundrypad核心板后的實驗板,以及連接上步進電機的實驗板如下圖所示。
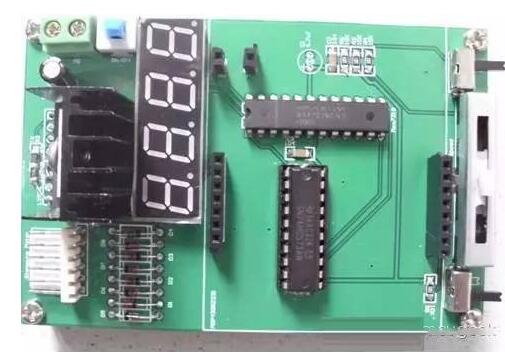
圖六.1 安裝好的板子

圖六.2插上Laundrypad核心板后的實驗板

圖 六.3連接上步進電機的實驗板
程序流程圖介紹
本作品軟件程序通過單片機P1.0、P1.1、P1.2和P1.3依次輸出高或低產(chǎn)生一定的相序來驅(qū)動電機驅(qū)動芯片,進而驅(qū)動步進電機;而轉(zhuǎn)向和模式是通過重復(fù)掃描相應(yīng)按鍵,判斷其相應(yīng)的高低從而對電機的轉(zhuǎn)向和模式進行控制。系統(tǒng)流程圖如圖3.1.1所示。
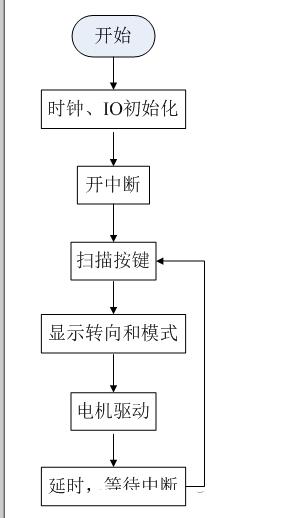
圖3.1.1系統(tǒng)流程圖
通過AD對滑變的電壓值的采樣來決定轉(zhuǎn)動速度的快慢,這部分是在AD中斷中進行的。AD中斷服務(wù)子程序如圖3.1.2所示。
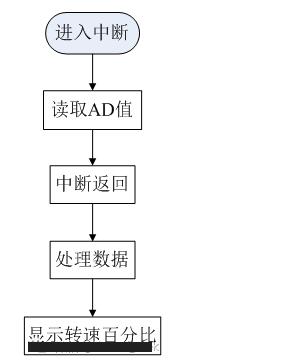
圖3.1.2中斷服務(wù)子程序
本作品是以MSP430G2系列Launchpad開發(fā)平臺為核心板,加上功能模塊底板,實現(xiàn)了對步進電機的四相四拍和四相八拍控制,并實現(xiàn)了轉(zhuǎn)動方向和轉(zhuǎn)動速度的控制,并且用數(shù)碼管顯示轉(zhuǎn)動方向和轉(zhuǎn)動速度的百分比









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論