 電子發燒友App
電子發燒友App


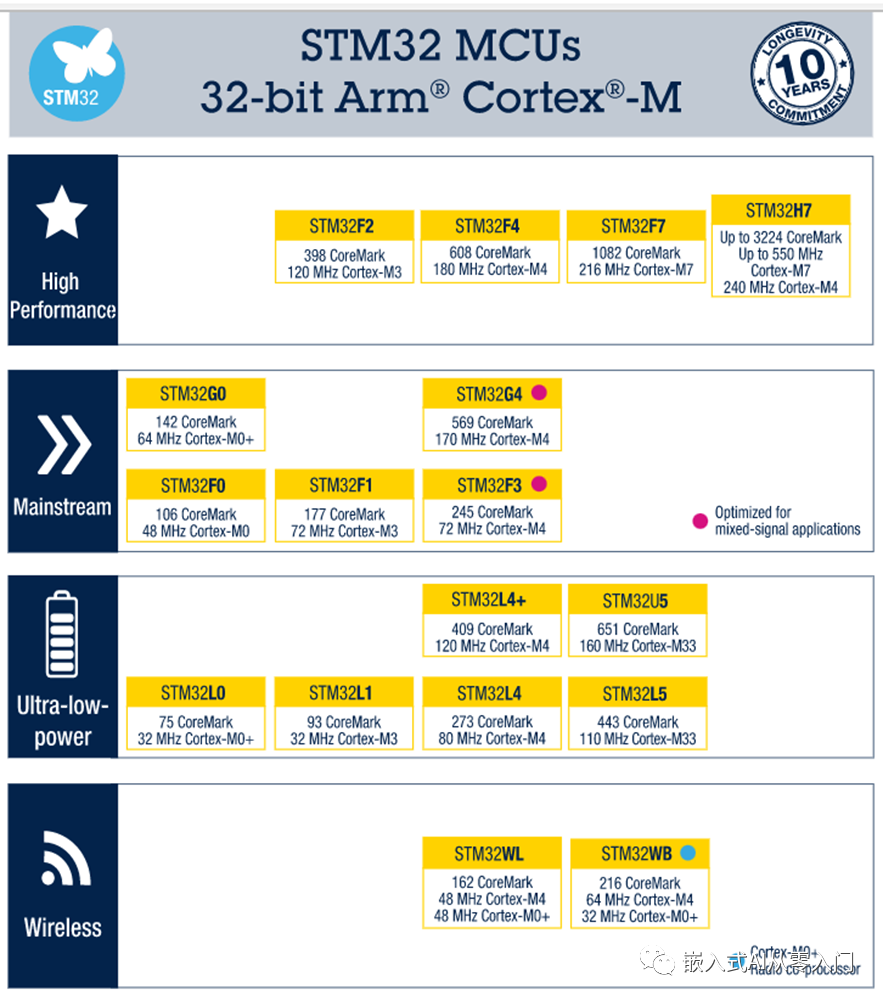
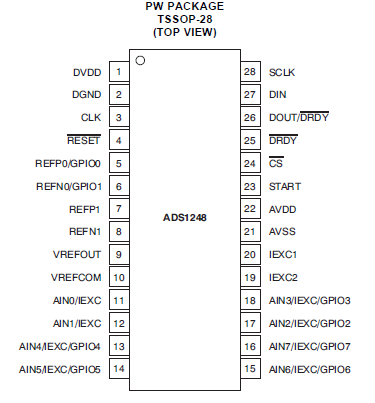
ADS1246是TI公司大致在2009年中期推出的24位ADC,最高采樣速率可達2Ksps,其為單通道器件,與之相對應的還有ADS1247和ADS1248三通道器件,但特性并非完全一致。據TI資料介紹,ADS1246在ADS1247/ADS1248功能上做出簡化,保留了其部分特性。本次設計,需要用到24位單通道轉換器件,于是考慮用到ADS1246,主控制器用STM32L系列。以下為ADS1246的引腳圖

上圖顯示ADS1246引腳圖,其CS/SCLK/DIN/DUT為SPI通訊接口,RESET/START/DRDY為控制與狀態腳,AVDD/AVSS以及DVDD/DGND分別為模擬/數字電源供電端,REFP/REFN為基準源輸入腳,AINP/AINN為模擬信號輸入端。其中,DRDY忙信號指示功能可以附加到DOUT引腳上,這樣DRDY腳可以留空。在實際使用中發現,START腳做為ADC的啟動腳,還必須得接出來,因我還未找到有通過軟件能啟動ADS1246轉換的方法,但其DS中有提到START信號和SLEEP/WAKEUP相類似的功能,暫未深研究。順便 提一下,TI關于ADS1246的文檔是改自于另一顆ADC器件的文檔,所以極其爛……
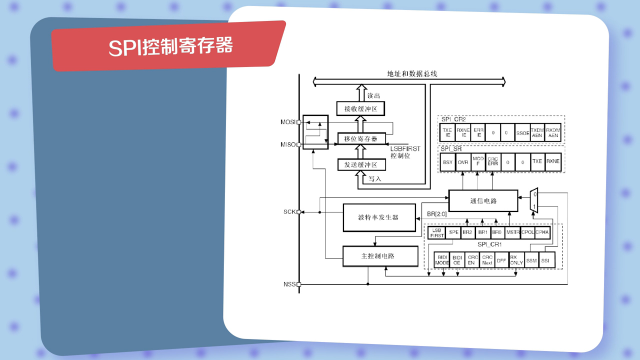
ADS1246的SPI時序,這個是需要提一下的,一般來說,SPI協議在上升沿鎖存數據,下降沿更新數據,這是一般SPI協議的作法。但ADS1246需要在下降沿鎖存數據,上升沿更新數據,在設置SPI寄存器的時候需要注意一下,當我采用一般性設置的時候,發現通訊不正常。以下是STM32L的SPI設置,用的是SPI2。
//SPI2配置
RCC-》APB1ENR|=RCC_APB1ENR_SPI2EN;
SPI2-》CR1=SPI_CR1_MSTR|SPI_CR1_BR|SPI_CR1_SSM|SPI_CR1_SSI|SPI_CR1_CPHA;//8位模式
SPI2-》CR1|=SPI_CR1_SPE;
SPI2的驅動:
//SPI2寫數據
voidSPI2_WriteBytes(uint8*TxBuffer,uint16TxLenth)
{
uint8i;
while(TxLenth--){
while((SPI2-》SR&SPI_SR_TXE)==0);
SPI2-》DR=*TxBuffer++;
while((SPI2-》SR&SPI_SR_RXNE)==0);
i=SPI2-》DR;
}
i++;
}
上程序中i++的引入在于避免keil-MDK產生編譯警告。
//SPI2讀數據
voidSPI2_ReadBytes(uint8*RxBuffer,uint16RxLenth)
{
while(RxLenth--){
while((SPI2-》SR&SPI_SR_TXE)==0);
SPI2-》DR=*RxBuffer;
while((SPI2-》SR&SPI_SR_RXNE)==0);
*RxBuffer++=SPI2-》DR;
}
}
以上驅動代碼,能保證SPI在最后一個字節完全發送完成之后退出,如果沒有等待SPI_SR_RXNE,則僅僅只是把數據轉移到SPI移位寄存器,并未完全送出,不詳述。
以下介紹我的驅動過程,在驅動ADS1246的時候,主要參考那個網方的58頁的極爛文檔,上面沒有明確提到整個上電過程以及初始化過程,至于那個相當重要的自校準過程及操作方法也沒有提到,所以本人摸索了一整天時間,在此整理。
ADS1246采用SPI通訊 ,其所有通訊引腳(SCK/DIN/DOUT)都在CS腳為低電平的時候有效,在CS為高時均為三態,當DRDY綁定到DOUT腳時,只有在CS為低時才能正確的指示忙狀態,若DRDY采用單獨的引腳,則不受CS控制。ADS1246的所有通訊過程被分為若干個命令組,有的需要帶參數,有的不需要帶參數,其實我也不明白它為什么要搞那么麻煩,感覺本來可以很簡單的處理,結果弄的很亂。以下為其命令分組:

大致分為命令類(不帶參數),讀寄存器,寫寄存器三類,以下分別分其實現:
//ADS1246命令碼列表
#defineADC_CMD_WAKEUP0x00//退出睡眠模式
#defineADC_CMD_SLEEP0x02//進入睡眠模式
#defineADC_CMD_SYNC0x04//同步ADC轉換
#defineADC_CMD_RESET0x06//芯片復位
#defineADC_CMD_NOP0xFF//空操作
#defineADC_CMD_RDATA0x12//單次讀取數據
#defineADC_CMD_RDATAC0x14//連續讀取數據
#defineADC_CMD_SDATAC0x16//停止連續讀取
#defineADC_CMD_RREG0x20//讀寄存器
#defineADC_CMD_WREG0x40//寫寄存器
#defineADC_CMD_SYSOCAL0x60//系統偏移校準
#defineADC_CMD_SYSGCAL0x61//系統增益校準
#defineADC_CMD_SELFOCAL0x62//系統自校準
#defineADC_CMD_RESTRICTED0xF1//
/*---------------------------------------------------------
寫命令
---------------------------------------------------------*/
voidADS1246_WriteCmd(uint8Cmd)
{
ADC_SPI_CS_CLR
ADC_WriteBytes(&Cmd,1);
ADC_SPI_CS_SET
}
/*---------------------------------------------------------
讀寄存器
---------------------------------------------------------*/
voidADS1246_ReadReg(uint8RegAddr,uint8*Buffer,uint8Length)
{
uint8Cmd[2];
ADC_SPI_CS_CLR
Cmd[0]=ADC_CMD_RREG|RegAddr;
Cmd[1]=Length-1;
ADC_WriteBytes(Cmd,2);
ADC_ReadBytes(Buffer,Length);
Cmd[0]=ADC_CMD_NOP;
ADC_WriteBytes(Cmd,1);
ADC_SPI_CS_SET
}
/*---------------------------------------------------------
寫寄存器
---------------------------------------------------------*/
voidADS1246_WriteReg(uint8RegAddr,uint8*Buffer,uint8Length)
{
uint8Cmd[2];
ADC_SPI_CS_CLR
Cmd[0]=ADC_CMD_WREG|RegAddr;
Cmd[1]=Length-1;
ADC_WriteBytes(Cmd,2);
ADC_WriteBytes(Buffer,Length);
ADC_SPI_CS_SET
}
在寫讀存器時,一定要注意,根據其DS文檔第32頁說明,其后發一個NOP命令可以強制DOUT引腳輸出高電平,這樣可以隨后判斷DOUT是否為低進而知道是否處于忙狀態,否則會得到一個脈沖。其實在任何的讀操作完成后,發一個字節的NOP命令即可將DOUT強制輸出高電平。當DRDY綁定到DOUT的時候,這個是非常重要的。
在弄清楚以上命令讀寫方法之后,需要實現其忙狀態判別,這個在很多芯片驅動時都會遇到,它直接提示了其內部的工作狀態,只有在不忙時才能繼續執行下一條指令。
/*---------------------------------------------------------
忙狀態判斷,最長等待時間,200X10ms=2S
-------------------------










 工商網監
工商網監
評論